死角推测装置、车辆行驶系统、死角推测方法与流程
1.本公开涉及死角推测装置、车辆行驶系统和死角推测方法。
背景技术:
2.现有的车辆行驶系统是利用设置在路边的设备即路边监视设备(rsu:road side unit:路边单元),掌握预先确定的区域内的物体的位置等作为物体信息,并向区域内的自动驾驶车辆提供物体信息(例如专利文献1)。更具体地,服务器处理由rsu获取的物体信息,并将其发送到区域内的自动驾驶车辆。自动驾驶车辆考虑物体信息并决定行驶路径,并基于该行驶路径行驶。根据这样的结构,即使不具有用于检测周围环境的传感器的自动驾驶车辆也能通过自动驾驶在区域内进行行驶。现有技术文献专利文献
3.专利文献1:日本专利特开2020-37400号公报
技术实现要素:
发明所要解决的技术问题
4.然而,由于rsu大多设置为从高处监视地面,因此产生了被该地面上的物体遮挡而无法检测到的区域、即由于物体而导致成为rsu的死角的区域即死角区域。从而,当障碍物存在于rsu无法掌握情况的死角区域内时,在死角区域内通行的自动驾驶车辆就有可能与障碍物发生碰撞。因此,需要能够在自动驾驶等中使用的死角区域。
5.因此,本公开是鉴于上述问题点而完成的,其目的在于提供一种能够推测死角区域的技术。用于解决技术问题的技术手段
6.本公开所涉及的死角推测装置包括:获取部,该获取部基于由检测部检测到的预定区域内的物体的信息即物体信息来获取所述物体的区域即物体区域;以及推测部,该推测部基于所述物体区域来推测由所述物体引起的所述检测部的死角的区域即死角区域。发明效果
7.根据本公开,基于由检测部检测到的预定区域内的物体的信息即物体信息,获取物体的区域即物体区域,并且基于物体区域推测由该物体引起的检测部的死角的区域即死角区域。根据这样的结构,能推测死角区域。
附图说明
8.图1是表示实施方式1的车辆行驶系统的图。图2是示出实施方式1所涉及的rsu结构的框图。图3是用来说明由于物体导致死角的产生机制和死角区域的计算方法的图。图4是用来说明由于物体导致死角的产生机制和死角区域的计算方法的图。
图5是用于说明实施方式1所涉及的死角区域的图。图6是表示实施方式1所涉及的rsu动作的流程图。图7是表示从实施方式1的rsu向融合服务器(fusionserver)发送的信息的图。图8是示出实施方式1所涉及的融合服务器的结构的框图。图9是示出实施方式1所涉及的融合服务器的动作的流程图。图10是用于说明实施方式1所涉及的融合服务器的区域整合的图。图11是表示从实施方式1的融合服务器向自动驾驶车辆发送的信息的图。图12是表示实施方式1所涉及的车辆侧控制装置的结构的框图。图13是表示实施方式1的车辆侧控制装置的动作的流程图。图14是用于说明实施方式1所涉及的车辆侧控制装置的动作的图。图15是用于说明实施方式1所涉及的车辆侧控制装置的动作的图。图16是用于说明实施方式1所涉及的车辆侧控制装置的动作的图。图17是用于说明实施方式1所涉及的车辆侧控制装置的动作的图。图18是用于说明实施方式1所涉及的车辆侧控制装置的动作的图。图19是表示实施方式2的车辆行驶系统的图。图20是示出实施方式2所涉及的路径规划服务器的结构的框图。图21是表示从实施方式2的路径规划服务器向自动驾驶车辆发送的信息的图。图22是示出实施方式2所涉及的路径规划服务器的动作的流程图。图23是表示实施方式2所涉及的车辆侧控制装置的结构的框图。图24是表示其它变形例所涉及的死角推测装置的硬件结构的框图。图25是表示其它变形例所涉及的死角推测装置的硬件结构的框图。
具体实施方式
9.<实施方式1>图1是表示实施方式1的车辆行驶系统的图。图1中的车辆行驶系统包括路边监视设备(rsu)1、融合服务器2和自动驾驶车辆3。
10.rsu1是死角推测装置,如后所述,生成预定区域内的物体的区域即物体区域和由该物体引起的rsu1的检测部的死角的区域即死角区域。在本实施方式1中,预先确定的区域是由rsu1生成的作为物体区域以及死角区域的生成对象的区域,即生成对象区域,但并不限于此。另外,在本实施方式1中,多个rsu1分别朝向多个方向,但并不限于此,例如也可以只设置一个rsu1。
11.融合服务器2基于由多个rsu1生成的物体区域和死角区域生成整合的物体区域和死角区域。自动驾驶车辆3基于由融合服务器2生成的整合的物体区域和死角区域来决定自动驾驶车辆3应该进行自动驾驶的行驶路径。自动驾驶车辆3的自动驾驶可以是ad(autonomous driving:自主驾驶)控制的自动驾驶,也可以是adas(advanced driver assistance system:高级驾驶辅助系统)控制的自动驾驶。
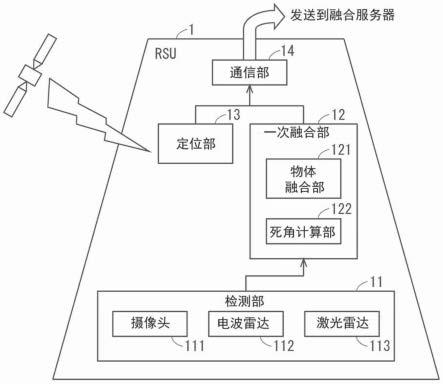
12.《rsu的结构》图2是示出实施方式1所涉及的rsu1的结构的框图。图2中的rsu1包括检测部11、一次融合部12、定位部13和通信部14。
13.检测部11由能够检测生成对象区域内的物体的信息即物体信息的传感器和传感器的辅助电路构成。在本实施方式1中,该传感器包括摄像头111、电波雷达112以及激光雷达113,物体信息是与摄像头111、电波雷达112以及激光雷达113的检测结果对应的信息。物体可以是移动物,也可以是静止物。
14.一次融合部12处理由检测部11检测到的物体信息。一次融合部12包括作为获取部的物体融合部121和作为推测部的死角计算部122。物体融合部121基于由检测部11检测到的物体信息,通过计算等获取生成对象区域内的物体的区域即物体区域。死角计算部122基于计算出的物体区域,通过计算等来推测由该物体引起的检测部11的死角的区域即死角区域。
15.定位部13获取rsu1的位置和rsu1的方向(例如方位)。定位部13例如由gps、“michibiki”等准天顶卫星、北斗、伽利略、glonass、navic等gnss(全球定位卫星系统)的定位模块和陀螺仪等使用惯性原理的方位测量单元构成。
16.通信部14向融合服务器2发送一次融合部12的物体区域和死角区域的信息以及定位部13的rsu1的位置和方向的信息。通信部14例如由通用通信设备或专用通信网络的设备构成。
17.图3和图4是用于说明由物体产生死角的机制和死角区域的计算方法的图。图3是从地面的水平方向观察的图,图4是从地面的竖直方向观察的图(即俯视图)。图3和图4中示出了生成对象区域内的物体6和由物体6生成的rsu1的死角7。即,图3和图4中示出了rsu1能够检测到的物体6的区域即物体区域和相对于物体6存在于rsu1的相反侧且无法被rsu1检测到的死角7的区域即死角区域。
18.这里,在图3中,将rsu1的设置基准点设为o,将o距地面的高度设为h,将rsu1与物体6的截面远侧顶点va之间的距离设为la,将o到va的线段与水平方向形成的角度设为θa。在这种情况下,死角7的最远点a和o的地面投影o
′
之间的距离ra、物体6的截面远侧和rsu1的设置位置之间的沿地面的距离ra′
、以及死角区域的截面的沿地面的宽度w可以分别通过使用下式(1)、(2)和(3)来计算。
19.[数学式1]
[0020]
[数学式2]r
a’=lacosθa…
(2)
[0021]
[数学式3]
[0022]
在图4中,若假设物体6是四边形,则以rsu1的设置基准点o为基准,产生被该四边形的边投影到地面的边等包围的死角区域。例如,在图4的情况下,在物体6的边c’b’处产生的死角区域是区域c’b’bc,在边a’b’处产生的死角区域是区域a’b’ba。死角区域c’b’bc和死角区域a’b’ba能分别近似为四边形。因此,在图4的情况下,物体6所产生的死角区域是死角区域c’b’bc和死角区域a’b’ba叠加而得到的六边形区域a’b’c’cba。由此,死角区域可以
用物体6的顶点a’b’c’的坐标和与它们对应的点a、b、c的坐标来表示。
[0023]
接着,说明点a、b、c的坐标的计算。例如,如图4所示,假设具有rsu1的设置基准点o作为原点的与地面平行的平面坐标系。点a位于设置基准点o和点a
′
的延长线上。当直线oa
′
a与x轴形成的角度为φa时,a的坐标可以用下式(4)计算,a
′
的坐标可以用下式(5)计算。点b、c、b
′
、c
′
的坐标也可以与点a、a
′
的坐标同样地计算。
[0024]
[数学式4]
[0025]
[数学式5](r
a’cosφa,r
a’sinφa)=(lacosθacosφa,lacosθasinφa)
…
(5)
[0026]
如上所述,死角计算部122通过将包括物体6的各个点的la、θa和φa的物体区域和设置基准点o距地面的高度h应用于上式(1)至(5)来推测死角区域。高度h可以是在设置rsu1时设定的固定值,也可以是由检测部11适当检测的值。
[0027]
如图5所示,根据物体6相对于rsu1的物体区域的方向(例如,方位),死角区域的形状例如改变为组合了两个四边形得到的形状、以及组合了三个四边形得到的形状等。例如,在物体区域61的方向的情况下,死角区域71的形状是组合了两个四边形而获得的六边形,在物体区域62的方向的情况下,死角区域72的形状是组合了三个四边形而获得的八边形。死角计算部122能够以与六边形死角区域71相同的方式推测八边形死角区域72。
[0028]
<rsu的流程图>图6是示出本实施方式1所涉及的rsu1的动作的流程图。rsu1每隔固定时间周期执行图6所示的动作。
[0029]
首先,在步骤s1中,检测部11获取各个传感器的原始数据,并且基于各个传感器的原始数据生成物体信息。例如,检测部11根据作为摄像头111的原始数据的图像信号,识别某时刻的画面中的物体6,生成物体6的位置和方向作为物体信息。检测部11生成电波雷达112和激光雷达113的原始数据的点群作为物体信息。当各个传感器的输出周期不同时,检测部11对作为各个传感器的输出的数据进行同步。
[0030]
在步骤s2中,物体融合部121进行融合处理以融合由检测部11生成的物体信息,并且计算物体区域。作为融合处理,例如,使用一种在不同传感器检测相同项目的值的情况下,考虑温度、亮度等环境条件下的各传感器的可靠性的同时,优先使用可靠性高的传感器的值的公知的技术。物体融合部121不仅可以计算物体区域,而且可以计算物体6的速度和加速度等。
[0031]
在本实施方式1中,在步骤s2,物体融合部121推测物体6是移动物还是静止物。即,物体融合部121推测在下一步骤s3中推测出的死角区域是由移动物引起的死角的区域还是由静止物引起的死角的区域。例如,当物体6的停止时间为阈值以下时,物体融合部121推测物体6是移动物,当物体6的停止时间大于阈值时,物体融合部121推测物体6是静止物。另外,一次融合部12的其它构成要素(例如,死角计算部122)也可以推测是由移动物引起的死角的区域还是由静止物引起的死角的区域。
[0032]
在步骤s3,死角计算部122基于由物体融合部121计算出的物体区域,通过使用在
图3和图4中说明的上述计算方法来计算死角区域。
[0033]
在步骤s4中,通信部14向融合服务器2发送物体区域和死角区域的信息、物体6是移动物还是静止物的推测结果、以及定位部13的rsu1的位置和方向的信息。然后,图6的动作结束。
[0034]
另外,上述动作由分别朝向多个方向的多个rsu1中的每一个进行。因此,多个rsu1的一次融合部12基于多个方向上的物体信息计算多个物体区域,并且多个rsu1的死角计算部122基于多个物体区域计算多个死角区域。
[0035]
《rsu发送信息的说明》图7是示出了从rsu1向融合服务器2发送的信息的图。图7的表中的各行示出了物体区域和死角区域的四边形部分中的某一个。
[0036]
图7的表的第一列是由rsu1检测到的每个物体的编号,并且表示在一个rsu1内为各个物体标注的物体编号。而在死角区域中标注了作为该死角的产生源的物体的物体编号。例如,在图5中,为物体区域62标注物体编号“1”的情况下,与其对应的3个四边形死角区域72也被标注物体编号“1”。在图5中,为物体区域61标注物体编号“2”的情况下,与其对应的2个四边形死角区域71也被标注物体编号“2”。
[0037]
图7的第二列表示区域的种类代码。obj_move表示移动物的物体区域,obj_stand表示静止物的物体区域。bld_move表示由移动物引起的死角区域,bld_stand表示由静止物引起的死角区域。
[0038]
图7的第三列表示各区域的四边形的顶点坐标。该坐标值是各个rsu1固有的坐标系中的值。
[0039]
从各个rsu1发送到融合服务器2的信息不仅包括图7的信息,而且包括定位部13的rsu1的位置和方向的信息。
[0040]
《融合服务器的结构》图8是表示本实施方式1的融合服务器2的结构的框图。图8中的融合服务器2包括接收部21、二次融合部22和发送部23。
[0041]
接收部21从多个rsu1接收图7的物体区域和死角区域等。另外,接收部21通过公知的技术使多个rsu1之间进行同步。
[0042]
二次融合部22处理来自多个rsu1的发送信息。二次融合部22包括坐标变换部221、整合融合部222和死角重新计算部223。坐标变换部221基于多个rsu1的位置和方向的信息,将来自多个rsu1的物体区域和死角区域的坐标系变换为统一的全局坐标系。整合融合部222对由坐标变换部221变换了坐标的来自多个rsu1的物体区域进行整合。死角重新计算部223对由坐标变换部221变换了坐标的来自多个rsu1的死角区域进行整合。
[0043]
发送部23向包括整合后的物体区域和死角区域的生成对象区域内的自动驾驶车辆3发送整合后的物体区域和死角区域。由此,rsu1的物体区域和死角区域实质上被发送到生成对象区域内的自动驾驶车辆3。
[0044]
《融合服务器的流程图》图9是示出本实施方式1所涉及的融合服务器2的动作的流程图。融合服务器2每隔固定时间的周期执行图9所示的动作。
[0045]
首先,在步骤s11,接收部21从多个rsu1接收图7的物体区域和死角区域。
[0046]
在步骤s12中,坐标变换部221基于多个rsu1的位置和方向的信息,将来自多个rsu1的物体区域和死角区域的坐标系变换为在多个rsu1之间统一的全局坐标系。
[0047]
在步骤s13中,整合融合部222对各个物体6进行将来自多个rsu1的物体区域整合的融合处理。在该融合处理中,例如,对各个物体6进行用于将来自多个rsu1的物体区域叠加的or处理。
[0048]
在步骤s14中,死角重新计算部223对各个物体6进行将来自多个rsu1的死角区域整合的融合处理。在该融合处理中,例如,对各个物体6进行用于提取多个rsu1的死角区域的公共部分的and处理。
[0049]
例如,如图10所示,设为rsu1a对于物体6生成死角区域73a,并且rsu1b对于物体6生成死角区域73b。在这种情况下,死角重新计算部223提取同一物体6的死角区域73a和73b在图10中的公共部分作为融合后的死角区域73c。该死角区域73c是对rsu1a、rsu1b均成为死角的区域。
[0050]
在图9的步骤s15中,发送部23向包括整合后的物体区域和死角区域的生成对象区域内的自动驾驶车辆3发送整合后的物体区域和死角区域。然后,图9的动作结束。
[0051]
《融合服务器发送信息的结构》图11是表示从融合服务器2向自动驾驶车辆3发送的信息的图。图11的表格中的各行表示整合后的物体区域和死角区域中的一个。
[0052]
图11的表格第一列表示一项标注给各个物体区域和死角区域的物体编号,而与物体和死角之间的关系无关。图11的表格第二列表示与图7的发送信息相同的种类代码。该种类代码可以包括表示静止时间比静止物更长的固定体的物体区域obj_fix、以及表示由固定体引起的死角区域bld_fix。图11的表格第三列表示与图7的发送信息相同的各区域的顶点坐标。图11的坐标值是在多个rsu1之间统一的全局坐标系中的值。在与图11中的一行对应的区域是三角形的情况下,可以在v4中填入无效值,与图11中的一行对应的区域是五边形以上的情况下,可以用五个以上的坐标来表示。
[0053]
《车辆侧控制装置的结构》图12是示出设置在自动驾驶车辆3中的车辆侧控制装置的结构的框图。图12中的车辆侧控制装置包括通信部31、定位测量部32、控制部33和驾驶部34。以下,有时将设置有车辆侧控制装置的自动驾驶车辆3记为“本车辆”。
[0054]
通信部31与融合服务器2通信。由此,通信部31接收由融合服务器2整合后的物体区域和死角区域。
[0055]
定位测量部32以与图2中的rsu1的定位部13相同的方式测量本车辆的位置和方向(例如,方位)。由定位测量部32测量到的本车辆的位置和方向由全局坐标系表示。
[0056]
控制部33基于通信部31接收到的物体区域和死角区域来控制本车辆的行驶。控制部33包括路径生成部331和目标值生成部332。路径生成部331基于由定位测量部32测量到的本车辆的位置、目的地、物体区域、死角区域和全局坐标系的地图,生成并决定本车辆应该行驶的行驶路径。目标值生成部332生成用于使本车辆沿着由路径生成部331生成的行驶路径行驶的车速、方向盘角度等的控制目标值。
[0057]
驾驶部34包括传感器341、ecu(电子控制单元)342和体系架构343。ecu342基于由传感器341检测到的本车辆周围的信息和由控制部33生成的控制目标值来对体系架构343
进行驱动。
[0058]
《车辆侧控制系统的流程图》图13是示出本实施方式1所涉及的自动驾驶车辆3的车辆侧控制装置的动作的流程图。车辆侧控制装置每隔固定时间的周期执行图13所示的动作。
[0059]
首先,在步骤s21中,定位测量部32测量并获取本车辆的位置和方向。
[0060]
在步骤s22中,通信部31接收由融合服务器2整合后的物体区域和死角区域。
[0061]
在步骤s23,路径生成部331将由定位测量部32测量到的本车辆的位置和方向、目的地、物体区域、死角区域转录并映射到全局坐标系的地图上。通过预先将所有坐标值统一为全局坐标系的值,能容易地进行步骤s23中的映射。
[0062]
在步骤s24中,路径生成部331基于映射的地图生成本车辆应该行驶的行驶路径。例如,首先,如图14所示,路径生成部331根据由定位测量部32测量到的本车辆51的位置和方向,生成能够在最短时间内到达目的地52的路径作为暂定路径53。在图14的示例中,目的地52是停车框内的地点,但不限于此。路径生成部331通过在暂定路径53上反映物体区域和死角区域来生成行驶路径。以下用图15~图18对此进行说明。
[0063]
如图15所示,当移动物的物体区域54存在于暂定路径53上时,路径生成部331生成用于使本车辆暂停在移动物的物体区域54跟前,并且当该物体区域从本车辆51跟前消失后再开始行驶的行驶路径。如图16所示,在暂定路径53上存在静止物的物体区域55的情况下,路径生成部331生成用于使本车辆避开静止物的物体区域55的行驶路径56。
[0064]
如图17所示,当移动物的死角区域57存在于暂定路径53上时,路径生成部331生成用于使本车辆暂停在移动物的死角区域57跟前,并且当该死角区域57从本车辆51跟前消失后再开始行驶的行驶路径。如图18所示,在暂定路径53上存在静止物的死角区域58的情况下,路径生成部331生成用于避开静止物的物体区域和死角区域58的行驶路径59。
[0065]
当在到达目的地之间存在多个包括物体区域和死角区域的区域时,路径生成部331针对所有区域生成满足图15至图18的条件的行驶路径作为最终的行驶路径。另外,由于是在相对于移动物的物体区域和死角区域暂停了之后,周期性地执行图13的流程图中的动作,所以随着移动物的物体区域和死角区域的移动,本车辆重新开始行驶。
[0066]
在图13的步骤s25中,目标值生成部332基于由路径生成部331生成的行驶路径生成控制目标值。然后,图13的动作结束。
[0067]
《实施方式1的总结》根据上述本实施方式1,rsu1获取物体的物体区域,推测物体的死角区域。根据这样的结构,例如,自动驾驶车辆3即使不具有传感器,也能掌握在自动驾驶车辆3周围存在的物体的物体区域和死角区域。因此,自动驾驶车辆3即使不具有传感器,也能基于物体区域和死角区域来规划出抑制了与物体的碰撞和与死角区域内的障碍物的碰撞的行驶路径。此外,由于推测出死角区域是由移动物引起的死角的区域还是由静止物引起的死角的区域,所以例如自动驾驶车辆3能根据物体的种类来规划适当的行驶路径。
[0068]
<变形例>在实施方式1中,图2的rsu1的检测部11包括摄像头111、电波雷达112以及激光雷达113这3种传感器,但是为了获取必要的物体区域以及死角区域,也可以包括其他传感器。
[0069]
另外,在实施方式1中,图2的一次融合部12包含在rsu1中,但并不限于此。例如,一
次融合部可以包括在融合服务器2中,或者可以设置在与rsu1和融合服务器2不同的构成要素中。在这种情况下,可以从rsu1的结构中省略一次融合部12,并且可以从图6中的rsu1的流程图中省略步骤s2的物体区域计算和步骤s3的死角区域计算。
[0070]
另外,在实施方式1中,作为图2的定位部13,使用了各种gnss,但并不限于此。例如,在固定式rsu1的情况下,定位部13可以是没有搭载gnss但存储了rsu1的位置和方向的固定定位用的存储器。该固定定位用的存储器可以组装在通信部14、一次融合部12或检测部11中。此外,为了应对由强风引起的振动等,定位部13可以包括加速度传感器和陀螺仪传感器。
[0071]
<实施方式2>图19是表示实施方式2的车辆行驶系统的图。另外,在本实施方式2所涉及的结构要素中,对与上述结构要素相同或类似的结构要素标注相同或类似的参照标号,主要对不同的结构要素进行说明。
[0072]
在实施方式1中,融合服务器2向自动驾驶车辆3发送物体区域和死角区域,自动驾驶车辆3基于物体区域和死角区域生成行驶路径和控制目标值。与此相对,在本实施方式2中,作为行驶模式生成装置的路径规划服务器8基于来自多个rsu1的物体区域和死角区域,决定生成对象区域内的自动驾驶车辆9的行驶模式,并将该行驶模式发送到自动驾驶车辆9。另外,行驶模式是用于沿着实施方式1中说明的行驶路径56行驶的行驶模式,实质上与行驶路径56相同。自动驾驶车辆9基于从路径规划服务器8接收到的行驶模式生成控制目标值,并基于控制目标值行驶。自动驾驶车辆9的自动驾驶可以是ad(autonomous driving:自主驾驶)控制的自动驾驶,也可以是adas(advanced driver assistance system:高级驾驶辅助系统)控制的自动驾驶。
[0073]
《rsu的结构》本实施方式2的rsu1的结构与实施方式1的rsu1的结构相同。
[0074]
《路径规划服务器的结构》图20是示出实施方式2所涉及的路径规划服务器8的结构的框图。图20中的路径规划服务器8包括接收部81、二次融合部82、车辆位置获取部83、地图数据库84、行驶模式生成部85和发送部86。
[0075]
接收部81与实施方式1的接收部21相同,从多个rsu1接收发送信息等。
[0076]
二次融合部82包括与实施方式1的坐标变换部221、整合融合部222以及死角重新计算部223相同的坐标变换部821、整合融合部822以及死角重新计算部823。这样构成的二次融合部82与实施方式1的二次融合部22同样,进行来自多个rsu1的物体区域的整合和来自多个rsu1的死角区域的整合。
[0077]
车辆位置获取部83例如通过与生成对象区域内的各自动驾驶车辆9进行通信,从而依次获取生成对象区域内的各自动驾驶车辆9的位置、方位和目的地。地图数据库84存储生成对象区域内的全局坐标系的地图。
[0078]
行驶模式生成部85进行与实施方式1的自动驾驶车辆3所具备的路径生成部331相同的处理。具体地说,行驶模式生成部85基于由车辆位置获取部83获取到的自动驾驶车辆9的位置、方位和目的地、由二次融合部82整合后的物体区域和死角区域、以及地图数据库84的地图,生成并决定自动驾驶车辆9的行驶模式。发送部86向自动驾驶车辆9发送包括时刻
和目标位置的列表的行驶模式。图21是示出从路径规划服务器8发送到自动驾驶车辆9的时刻和目标位置的列表的图。目标位置由全局坐标系中的xy坐标表示。
[0079]
《路径规划服务器的流程图》图22表示本实施方式2的路径规划服务器8的动作的流程图。路径规划服务器8每隔固定时间的周期执行图22所示的动作。
[0080]
从步骤s31到步骤s34,路径规划服务器8进行与从图9的步骤s11的发送信息的接收到步骤s14的死角区域的整合为止的处理相同的处理。
[0081]
从步骤s35到步骤s38,路径规划服务器8进行与从图13的步骤s21中的获取本车辆的位置和方向的方位到步骤s24中的生成行驶路径为止的处理相同的处理。即,在本实施方式2中,在步骤s38中,路径规划服务器8生成与步骤s24的行驶路径相同的用于使自动驾驶车辆9沿着该行驶路径行驶的行驶模式。由此,生成用于沿着图15至18中说明的行驶路径进行行驶的行驶模式。
[0082]
例如,路径规划服务器8在推测出死角区域是由于静止物引起的死角的区域时,决定用于使自动驾驶车辆9避开该死角区域的行驶模式。例如,路径规划服务器8在推测出死角区域是由于移动物引起的死角的区域时,决定用于使自动驾驶车辆9停在死角区域跟前,并且当该死角区域从自动驾驶车辆9跟前消失后再开始行驶的行驶模式。
[0083]
在步骤s39中,路径规划服务器8向自动驾驶车辆9发送行驶模式。然后,图22的动作结束。
[0084]
<自动驾驶汽车的结构>图23是示出设置在自动驾驶车辆9中的车辆侧控制装置的结构的框图。图23中的车辆侧控制装置包括通信部91、定位测量部92、控制值生成部93和驾驶部94。
[0085]
通信部91与路径规划服务器8通信。由此,通信部91接收由路径规划服务器8生成的行驶模式。定位测量部92与实施方式1的定位测量部32同样地测量本车辆的位置和方向。
[0086]
控制值生成部93基于由通信部91接收到的行驶模式和由定位测量部92测量到的本车辆的位置和方位,生成车速、方向盘角度等的控制目标值。
[0087]
驾驶部94包括传感器941、ecu942和体系架构943。ecu942基于由传感器941检测到的本车辆周围的信息和由控制值生成部93生成的控制目标值来驱动体系架构943。
[0088]
《实施方式2的总结》根据以上的本实施方式2,路径规划服务器8能够掌握存在于各自动驾驶车辆9周围的物体的物体区域以及死角区域。因此,即使自动驾驶车辆9不包括传感器和路径生成部,路径规划服务器8也能基于物体区域和死角区域来规划出抑制了自动驾驶车辆9与物体等碰撞的行驶模式。此外,由于推测出死角区域是由移动物引起的死角的区域还是由静止物引起的死角的区域,所以例如自动驾驶车辆9能根据物体的种类来规划适当的行驶路径。
[0089]
<其它变形例>下文中,将在图2中分别作为物体融合部121和死角计算部122来说明的获取部和推测部记为“获取部等”。获取部等由图24所示的处理电路101实现。即,处理电路101包括:获取部,其基于由检测部检测到的预定区域内的物体的信息即物体信息来获取物体的区域即物体区域;以及推测部,其基于物体区域来推测由物体引起的检测部的死角的区域即死角区域。处理电路101可以适用专用的硬件,也可以适用执行存储器中所存储的程序的处理
器。处理器例如可以是中央处理装置、处理装置、运算装置、微处理器、微机、dsp(digital signal processor:数字信号处理器)等。
[0090]
在处理电路101为专用硬件的情况下,处理电路101例如可以是单一电路、复合电路、编程处理器、并联编程处理器、asic(application specific integrated circuit:专用集成电路)、fpga(field-programmable gate array:现场可编程门阵列)或它们的组合。获取部等各部分的功能可以分别由使处理电路分散而得的电路来实现,也可以将各部的功能汇总而由一个处理电路来实现。
[0091]
在处理电路101为处理器的情况下,获取部等的功能通过与软件等的组合来实现。另外,软件等例如可以是软件、固件、或软件和固件。软件等以程序的形式来表述,并存储在存储器中。如图25所示,适用于处理电路101的处理器102读取存储在存储器103中的程序并执行,由此来实现各部分的功能。即,死角推测装置包括存储器103,其用于存储结果是执行以下步骤的程序:当由处理电路101执行时,基于由检测部检测到的预定区域内的物体的信息即物体信息,获取物体的区域即物体区域的步骤;以及基于物体区域推测由物体引起的检测部的死角的区域即死角区域的步骤。换言之,该程序也可认为是使计算机执行获取部等的步骤、方法的程序。这里,存储器103例如可以是ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)、闪存、eprom(erasable programmable read only memory:可擦除可编程只读存储器)、eeprom(electrically erasable programmable read only memory:电可擦可编程只读存储器)等非易失性或易失性的半导体存储器、以及hdd(hard disk drive:硬盘驱动器)、磁盘、软盘、光盘、压缩磁盘、小型磁盘、dvd(digital versatile disc:数字通用盘)及其驱动装置等、或者今后使用的所有存储介质。
[0092]
以上,说明了获取部等的各功能由硬件及软件等中的任意一方来实现的结构。然而并不限于此,也可以是利用专用的硬件来实现获取部等的一部分、并利用软件等来实现另外一部分的结构。例如,对于获取部,可利用作为专用的硬件的处理电路101、接口及接收器等来实现其功能,除此以外,可通过由作为处理器102的处理电路101读取存储于存储器103的程序并执行来实现其功能。
[0093]
如上所述,处理电路101可以利用硬件、软件等或它们的组合来实现上述各种功能。
[0094]
另外,能够自由地组合各实施方式及各变形例,适当地变形、省略各实施方式及各变形例。标号说明
[0095]
1 rsu,3、9自动驾驶车辆,6物体,7死角,8路径规划服务器,11检测部,56行驶路径,61、62物体区域,71、72死角区域,121物体融合部,122死角计算部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1