组合齿面摆线活齿传动麦轮模组及其四足机器人的制作方法
1.本实用新型涉及麦克纳姆轮技术领域,特别涉及组合齿面摆线活齿传动麦轮模组及其四足机器人。
背景技术:
2.麦克纳姆轮常用于agv小车,现有的技术方案一般为“麦轮+减速器+电机”的常规方案,或集成式的“麦轮+减速电机”方案;其中,减速传动部分常用行星齿轮传动机构,在有限的空间内,其减速比较小,额定扭矩不够大,对此,采用活齿传动替换其行星齿轮传动,是一个新的研究方向。活齿传动有众多分支,本公司根据现有活齿传动技术中的缺点,开创性地提出了组合齿面滚道活齿传动技术,如专利号为202010178794.6提出的《一种组合齿面活齿传动啮合副及其生成方法》,给出了组合齿面活齿啮合副的结构原理和生成方法,特别是组合齿面滚道的结构原理和生成方法;专利号为202010178795.0提出的《一种单级组合摆线齿面活齿传动单元》、专利号为202010178798.4提出的《一种单级密排组合齿面摆线活齿传动单元》以及专利号为202010178797.x提出的《一种二齿差密排组合齿面摆线活齿传动单元》等,给出了组合齿面滚道摆线轮的应用方式和实例;专利号为202010956765.8提出的《一种机械平衡组合齿面滚道摆线活齿减速器》,给出了上述传动单元在活齿减速器上的具体应用。
技术实现要素:
3.针对上述问题,本实用新型提出组合齿面摆线活齿传动麦轮模组及其四足机器人,在单级组合齿面滚道摆线活齿减速器的基础上,将其壳体做成麦轮轮毂,轮毂上装有辊子,且分为左旋轮毂和右旋轮毂两种形式;将原有的单级组合齿面滚道摆线活齿减速器的输出轮固定,在其上固定安装一个带伺服控制模块的无刷电机,电机的转子座固定安装在驱动轴上,则轮毂变为整个传动机构的输出构件;在组合齿面摆线活齿传动麦轮模组的基础上,为四足机器人的四个小腿模块上各安装一个麦轮模组,麦轮模组成对出现,每对含一个左旋麦轮模组和一个右旋麦轮模组。
4.本实用新型所使用的技术方案是:组合齿面摆线活齿传动麦轮模组,包括活齿轮、传动轮、活齿、等速齿、驱动轴、第一轴承、第二轴承、第一螺钉、轮毂、辊子、辊轴、螺母、第一外环、第二外环、第二螺钉、电机箱、定子、线圈、永磁体、转子座、紧定螺钉、电机盖、第三螺钉、伺服控制模块、指示灯罩、弹性挡圈、等速轮、密封圈、滚动体、第四螺钉,其特征在于:活齿轮和第一外环分别固定安装在轮毂两侧;第二外环固定安装在第一外环上;一圈圆周均布的第一螺钉插入活齿轮并拧在轮毂上;一圈圆周均布的第四螺钉插入第一外环和第二外环,并拧在轮毂上;等速轮铰接在第二外环上;第一外环、第二外环和等速轮之间装配有一个滚动体;第二外环上固定安装有一个密封圈,且密封圈与等速轮接触配合;驱动轴两侧分别通过第一轴承铰接在活齿轮和等速轮上;传动轮通过第二轴承铰接在驱动轴的偏心轴段上;传动轮的两端面上分别有一个组合齿面滚道和m个等速滚道;组合齿面滚道的滚道波数
为n个;活齿轮或等速轮上有圆周均布的数量为n
±
1的活齿槽,或者圆周均布的数量为m的等速齿槽;当组合齿面滚道为组合齿面内摆线滚道时,活齿槽数量为n
‑
1,当组合齿面滚道为组合齿面外摆线滚道时,活齿槽数量为n+1;当活齿轮上有活齿槽时,等速轮上为等速齿槽;当活齿轮上有等速齿槽时,等速轮上为活齿槽;每个活齿槽内装配有一个活齿,所有活齿均与组合齿面滚道接触配合;每个等速齿槽内装配有一个等速齿,每个等速齿和一个等速滚道接触配合,且每个等速滚道内只有一个等速齿;电机箱通过一圈圆周均布的第二螺钉固定安装在的等速轮上;电机盖通过一圈圆周均布的紧定螺钉固定安装在电机箱上;伺服控制模块通过第三螺钉固定安装在电机盖上;三个指示灯罩固定安装在电机盖上;转子座安装在驱动轴上,并通过固定安装在驱动轴上的弹性挡圈轴向定位;一圈圆周均布的永磁体固定安装在转子座上;一圈圆周均布的定子固定安装在电机箱上,每个定子上缠绕有一圈线圈;轮毂上有一圈圆周均布的轮毂支座,每个轮毂支座上通过两个螺母固定安装有一个辊轴;每个辊轴上铰接有一个辊子。
5.进一步的,组合齿面外摆线滚道的滚道中心线为外摆线;组合齿面内摆线滚道的滚道中心线为内摆线;与组合齿面滚道配合的活齿为旋转体,其外边面上的点到其轴线的最大距离大于滚道中心线的最小曲率半径;将外摆线或内摆线等分成n个用于扫略的扫略波,且每个扫略波的中心为波峰或波谷;活齿中心在扫略波上,且分别沿着两种扫略波的一端运动至另一端,其活齿外表面运动轨迹的包络面沿着扫略波的波峰或波谷凸向的方向与传动轮的相交面,为两种不同的组合齿面;两种组合齿面圆周均布可构成组合齿面滚道的主体;去除组合齿面滚道中的传动轮上的多余材料,可得到切除齿面;圆周均布的两种组合齿面和切除齿面共同构成组合齿面滚道,其中,切除齿面始终不与活齿接触啮合。
6.进一步的,外摆线的平面直角坐标参数方程为
[0007][0008]
内摆线的平面直角坐标参数方程为
[0009][0010]
以上各式中,r
‑
啮合曲线径向半径;a
‑
啮合曲线幅值;n
‑
啮合曲线波数。
[0011]
进一步的,驱动轴上偏心轴段的偏心距等于组合齿面滚道的滚道波幅;等速滚道的滚道中心线为圆形,且该圆形的半径等于组合齿面滚道的滚道波幅;等速滚道的滚道面为活齿中心沿着等速滚道的滚道中心线运动一周、活齿外表面运动轨迹的包络面与传动轮的相交面。
[0012]
进一步的,轮毂包括右旋轮毂和左旋轮毂;轮毂支座包括右旋支座和左旋支座;右旋轮毂上的轮毂支座为右旋支座;左旋轮毂上的轮毂支座为左旋支座。
[0013]
进一步的,电机箱上有接线端口,接线端口一端与电机盖内的伺服驱动模块通过线路连接,另一端用于外接线路。
[0014]
进一步的,辊轴的轴线与轮毂的轴线异面平行。
[0015]
进一步的,滚动体为圆周均布的、彼此接触的交叉滚子与保持块,或者是圆周均布的、彼此接触的球与保持块,或者是圆周均布的彼此接触的球。
[0016]
进一步的,带有组合齿面摆线活齿传动麦轮模组的四足机器人,包括右旋麦轮模组、左旋麦轮模组、支座、连接板、机身模块、胯关节模块、大腿关节模块、小腿关节模块、大腿模块、小腿模块、足部模块,右旋麦轮模组为带有右旋轮毂的组合齿面摆线活齿传动麦轮模组;左旋麦轮模组为带有左旋轮毂的组合齿面摆线活齿传动麦轮模组;机身模块的两侧各固定安装有两个胯关节模块;每个胯关节模块上安装有一个大腿关节模块;每个大腿关节模块上安装有一个小腿关节模块;每个小腿关节模块上安装有一个大腿模块;每个大腿模块上安装有一个小腿模块;每个小腿模块末端安装有一个足部模块;每个小腿模块上固定安装有一个支座和连接板;每组支座和连接板上固定安装有一个右旋麦轮模组或一个左旋麦轮模组;将两个右旋麦轮模组和两个左旋麦轮模组看做一个点,可在空间内构成一个四边形,这个四边形的对角线上的麦轮模组的旋向相同,均为右旋或左旋;固定安装在右旋麦轮模组上的支座和连接板零件,与固定安装在左旋麦轮模组上的支座和连接板零件,在空间中呈镜像对称关系。
[0017]
由于本实用新型采用了上述技术方案,本实用新型具有以下优点:(1)扭矩密度高;(2)减速比范围大,可灵活适应多种应用要求;(3)使用寿命长,精度高;(4)结构简单,制造和装配难度低。
附图说明
[0018]
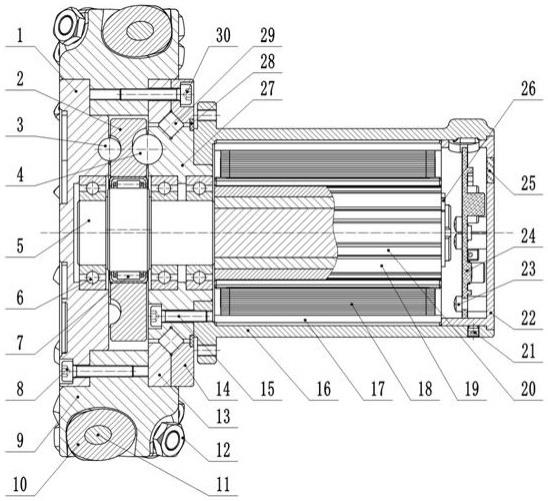
图1为本实用新型实施例一的结构剖视图。
[0019]
图2为本实用新型实施例一中活齿轮的结构示意图。
[0020]
图3、图4为本实用新型实施例一中传动轮的结构示意图。
[0021]
图5为本实用新型实施例一中驱动轴的结构示意图。
[0022]
图6为本实用新型右旋轮毂的结构示意图。
[0023]
图7为本实用新型左旋轮毂的结构示意图。
[0024]
图8为本实用新型实施例一种等速轮的结构示意图。
[0025]
图9为本实用新型右旋麦轮模组的外观结构示意图。
[0026]
图10为本实用新型左旋麦轮模组的外观结构示意图。
[0027]
图11为本实用新型的组合齿面摆线活齿传动麦轮模组应用在四足机器人上的结构示意图。
[0028]
附图标号:1
‑
活齿轮;2
‑
传动轮;3
‑
活齿;4
‑
等速齿;5
‑
驱动轴;6
‑
第一轴承;7
‑
第二轴承;8
‑
第一螺钉;9
‑
轮毂;10
‑
辊子;11
‑
辊轴;12
‑
螺母;13
‑
第一外环;14
‑
第二外环;15
‑
第二螺钉;16
‑
电机箱;17
‑
定子;18
‑
线圈;19
‑
永磁体;20
‑
转子座;21
‑
紧定螺钉;22
‑
电机盖;23
‑
第三螺钉;24
‑
伺服控制模块;25
‑
指示灯罩;26
‑
弹性挡圈;27
‑
等速轮;28
‑
密封圈;29
‑
滚动体;30
‑
第四螺钉;31
‑
右旋麦轮模组;32
‑
左旋麦轮模组;33
‑
支座;34
‑
连接板;35
‑
机身模块;36
‑
胯关节模块;37
‑
大腿关节模块;38
‑
小腿关节模块;39
‑
大腿模块;40
‑
小腿模块;41
‑
足部模块;101
‑
活齿槽;201
‑
组合齿面滚道;202
‑
等速滚道;501
‑
偏心轴段;901
‑
右旋轮毂;90101
‑
右旋支座;902
‑
左旋轮毂;90201
‑
左旋支座;1601
‑
接线端口;2701
‑
等速齿槽。
具体实施方式
[0029]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行
清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0030]
图1~图5和图8为本实用新型的实施例一,该实施例中,活齿轮1上有21个圆周均布的半径为3mm的球形活齿槽101;等速轮27上有8个圆周均布的半径为4mm的球形等速齿槽2701;活齿3为半径为3mm的球;等速齿4为半径为4mm的球;传动轮2上组合齿面滚道201的啮合曲线为外摆线,方程如下:
[0031][0032]
式中,x和y的单位为mm。
[0033]
实施例一中,滚动体29采用交叉滚子,可承载较大的双向载荷;轮毂9为左旋轮毂902;辊子10的个数为15;定子17及线圈18的个数为12,永磁体19的个数为8,即采用12n8p形式的无刷电机结构。指示灯罩25为透明树脂,有红、黄和绿三种颜色。
[0034]
图6和图7给出了轮毂9的两种形式,即右旋轮毂901和左旋轮毂902;右旋轮毂901上的右旋支座90101呈右螺旋分布;左旋轮毂902上的左旋支座90201呈左螺旋分布。
[0035]
图9~图11给出了应用了组合齿面摆线活齿传动麦轮模组的四足机器人的实施例,该实施例中,四足机器人右前和左后小腿模块40上的组合齿面摆线活齿传动麦轮模组为右旋麦轮模组31;四足机器人左前和右后小腿模块40上的组合齿面摆线活齿传动麦轮模组为左旋麦轮模组32。
[0036]
本实用新型的工作原理:实施例一中的组合齿面摆线活齿传动麦轮模组,外部线缆连接电机箱上16上的接线端口1601,为伺服控制模块24和线圈18供电并提供指令信号;转子座20在线圈18的作用下驱动驱动轴5转动,驱动轴5转动时,位于其偏心轴段501上的传动轮2绕着驱动轴5的轴线公转,此时,等速齿4相对于等速轮27的位置不变,而所有等速齿27又与等速滚道202啮合,故等速齿4会作用于等速滚道202从而带动传动轮2绕着偏心轴段501的轴线自转,同时,组合齿面滚道201会推动与之啮合的所有活齿3带动活齿轮1绕着自身轴线转动,从而实现变速运动;由于活齿轮1、轮毂9、第一外环13和第二外环14为一个刚性的整体,故轮毂9、第一外环13和第二外环14会随着活齿轮1转动,且依靠滚动体29承载;轮毂9转动时,若辊子10与地面接触,则辊子10会在摩擦力作用下绕着辊轴11的轴线旋转。
[0037]
对于应用了组合齿面摆线活齿传动麦轮模组的四足机器人,常态下不仅可以行走,还可以在特定位姿下依靠四个组合齿面摆线活齿传动麦轮模组变身为带有四个独立悬挂的agv小车,通过控制不同的组合齿面摆线活齿传动麦轮模组的转速,可实现四足机器人在地面上的全向滚动移动。
[0038]
最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1