一种移动式固态电池供电机器人的制作方法
1.本实用新型属于储能电池技术领域,具体涉及一种移动式固态电池供电机器人。
背景技术:
2.随着新能源汽车行业的大力发展,新能源汽车数量迅猛增加,随之而来的是充电难的问题,新能源充电配套充电设备远没有跟上新能源汽车的发展速度,并且新能源汽车充电设施的规划和建设不合理且不完善,特别是充电设施分布非常不均衡,导致无法满足新能源汽车在发展过程中对充电设施的要求。
3.固定式的充电桩在使用过程中存在不少问题,例如充电桩故障率高、布局不合理、燃油车占位、小区无法安装充电桩等问题,容易导致电动汽车用户在使用过程中出现缺电焦虑。另外受限于土地使用和电力负荷,在大城市中心或者老旧城区建设大型集中式的充电站非常困难。
技术实现要素:
4.为了解决上述现有问题,本实用新型的目的在于提供一种移动式固态电池供电机器人,能够提升电动车充电的灵活性,解决新能源电动车充电难的问题。
5.本实用新型通过以下技术方案来实现:
6.本实用新型公开了一种移动式固态电池供电机器人,包括机器人控制模块、无线通讯模块、机器人定位模块、dc
‑
dc模块、固态电池储能模组、机器人充电口、机械臂和动力装置;
7.固态电池储能模组包括若干固态电池单体,固态电池储能模组与dc
‑
dc模块连接;机械臂上设有电动汽车供电枪和充电定位模块;机器人控制模块分别与无线通讯模块、机器人定位模块、dc
‑
dc模块和机械臂连接;dc
‑
dc模块分别与电动汽车供电枪和动力装置连接;充电定位模块与机器人控制模块连接;无线通讯模块与电动汽车通讯互联。
8.优选地,固态电池储能模组内设有电流传感器、电压传感器、若干加热装置和若干温度传感器,电流传感器、电压传感器、若干加热装置和若干温度传感器均与机器人控制模块连接。
9.进一步优选地,若干加热装置和若干温度传感器均布在固态电池储能模组内。
10.优选地,固态电池储能模组外部包覆有保温层。
11.优选地,固态电池储能模组外部设有防爆外壳。
12.优选地,充电定位模块包括高清摄像头、激光雷达和超声波传感器。
13.优选地,机械臂为六轴机械臂。
14.优选地,机器人控制模块还连接有红外避障装置。
15.优选地,动力装置为履带式。
16.优选地,固态电池单体为硫化物固态电池、氧化物固态电池、聚合物固态电池或复合固态电池。
17.与现有技术相比,本实用新型具有以下有益的技术效果:
18.本实用新型公开的一种移动式固态电池供电机器人,将固态电池储能模组安装在机器人上给电动机器人供电,可通过无线通讯模块接收指令,自动寻找所需要充电的电动汽车,具备智能化、无人化的特点,可通过成熟的智能系统方便管理;移动式固态电池供电机器人具有极大地灵活性,可以为无法安装充电桩的地区提供方便快捷的充电服务,解决充电设施地域不均衡的问题,方便新能源电动车在需要的时候进行充电;移动式固态电池供电机器人采用固态电池,具有高安全性;可充分利用电网谷电对移动固态电池供电机器人进行充电,分散大量新能源电动车集中充电对电网带来的冲击。
19.进一步地,固态电池储能模组设有加热模块,保障固态电池的充放电性能;同时设置电流传感器、电压传感器和温度传感器,通过对电池的温度、电压和电流的反馈信息实时调整电池的充放电状态。
20.更进一步地,若干加热装置和若干温度传感器均布在固态电池储能模组内,能够使固态电池储能模组温度分布均匀,并且温度传感器能够反应固态电池储能模组内各处的温度情况,提高安全性和稳定性。
21.进一步地,固态电池储能模组外部包覆有保温层,能够使固态电池保持较高充放电温度,提高性能。
22.进一步地,固态电池储能模组外部设有防爆外壳,提高安全性能。
23.进一步地,充电定位模块包括高清摄像头、激光雷达和超声波传感器,能够互相协同配合,使机器人精准的找到电动汽车的充电口。
24.进一步地,红外避障装置能够避免机器人碰撞损坏或伤人。
25.进一步地,履带式的动力装置能够适应各种地形和地面情况。
26.进一步地,固态电池单体为硫化物固态电池、氧化物固态电池、聚合物固态电池或复合固态电池,可根据实际需求进行选择,兼容性好。
附图说明
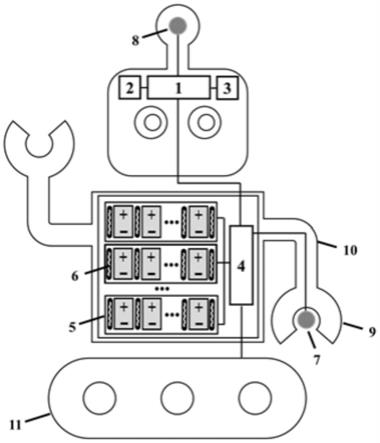
27.图1为本实用新型的整体结构示意图。
28.图中:1为机器人控制模块,2为无线通讯模块,3为机器人定位模块,4为dc
‑
dc模块,5为固态电池储能模组,6为加热装置,7为电动汽车供电枪,8为机器人充电口,9为充电定位模块,10为机械臂,11为动力装置。
具体实施方式
29.下面结合附图和具体实施例对本实用新型做进一步详细描述,其内容是对本实用新型的解释而不是限定:
30.如图1,为本实用新型的一种移动式固态电池供电机器人,包括机器人控制模块1、无线通讯模块2、机器人定位模块3、dc
‑
dc模块4、固态电池储能模组5、机器人充电口8、机械臂10和动力装置11。
31.固态电池储能模组5包括若干固态电池单体,固态电池单体可以采用硫化物固态电池、氧化物固态电池、聚合物固态电池或复合固态电池。
32.固态电池储能模组5与dc
‑
dc模块4连接;机械臂10上设有电动汽车供电枪7和充电
定位模块9;机器人控制模块1分别与无线通讯模块2、机器人定位模块3、dc
‑
dc模块4和机械臂10连接;dc
‑
dc模块4分别与电动汽车供电枪7和动力装置11连接;充电定位模块9与机器人控制模块1连接;无线通讯模块2与电动汽车通讯互联。
33.在本实用新型的一个较优的实施例中,固态电池储能模组5内设有电流传感器、电压传感器、若干加热装置6和若干温度传感器,电流传感器、电压传感器、若干加热装置6和若干温度传感器均与机器人控制模块1连接。
34.在本实用新型的一个较优的实施例中,若干加热装置6和若干温度传感器均布在固态电池储能模组5内。
35.在本实用新型的一个较优的实施例中,固态电池储能模组5外部包覆有保温层。
36.在本实用新型的一个较优的实施例中,固态电池储能模组5外部设有防爆外壳。
37.在本实用新型的一个较优的实施例中,充电定位模块9包括高清摄像头、激光雷达和超声波传感器。
38.在本实用新型的一个较优的实施例中,机械臂10为六轴机械臂。
39.在本实用新型的一个较优的实施例中,机器人控制模块1还连接有红外避障装置。
40.在本实用新型的一个较优的实施例中,动力装置11采用履带式。在地面比较平整的情况下,也可以采用轮子。
41.下面以一个具体的实施例对本实用新型的工作原理进行进一步解释:
42.固态电池储能模组5中所采用的固态电池单体为聚合物固态电池,聚合物固态电池单体通过串联或者并联的方式组成聚合物电池模组,聚合物电池模组的容量为62.5kw/125kwh。聚合物电池模组与dc
‑
dc模块4连接,dc
‑
dc模块4直接连接电动汽车供电枪7对外输出,机器人控制模块1通过控制dc
‑
dc模块4实现固态电池输出功率的控制。移动式固态电池供电机器人可为一辆电动汽车充电,充电口最大支持62.5kw的充电功率。固态电池置有温度传感器,电压传感器以及电流传感器,dc
‑
dc模块4中的bms模块实时监控电池的特征,机器人控制模块1通过收集电池的温度、电压、电流的反馈信息实时调整电池的充放电状态,从而让固态电池可以顺利进行充放电。
43.固态电池单体之间具有加热装置6,加热装置6采用自加热技术,采用固态电池自身携带的电量进行加热,当固态电池需要快速充放电时通过机器人控制模块1使加热装置6对固态电池进行快速加热,例如可将聚合物电池快速加热至60℃,使固态电池保持较高的充放电温度。在固态电池储能模组5外部包裹有保温层,减缓热量散失,提高能量效率。
44.无线通讯模块2可接收用户的充电请求,通过接收需要充电汽车的位置、汽车的剩余电量、所需的充电功率和汽车充电电量上限值信息,通过机器人定位模块3驱动机器人行使至指定位置,通过汽车的剩余电量、所需的充电功率、汽车充电电量上限值信息自动设置供电机器人的输出功率以及供电时间。
45.电动汽车供电枪7通过充电定位模块9包括摄像头、激光雷达和超声波传感器的协同工作准确定位电动汽车的充电口,通过机器人控制模块1控制机械臂10移动使电动汽车供电枪7与充电口准确对接,完成自动充电的动作。
46.固态电池储能模块可为电动汽车供电的同时也为供电机器人提供电能,当机器人控制模块1识别储能模块的电量低于10%时,将自动停止供电并行驶至机器人充电区进行充电。当机器人储能模块需要充电时,采用直流电对机器人进行充电,机器人充电口8与外
电路相连接,通过机器人控制模块1控制固态电池储能模组5充电电量,当储能模块电量充至90%时自动断开。
47.在本技术所提供的实施例中,所揭露的技术内容,主要是针对移动式固态电池供电机器人,以上所述仅为本实用新型实施例,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内可轻易想到的变化或者替换,或利用本实用新型说明书及附图内容所作的等效结构或者等效流程变换,或直接、间接运用在其他相关技术领域的情况,均应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1