一种用于无人机的换电机构的制作方法
1.本实用新型属于无人机充换电领域,尤其涉及一种用于无人机的换电机构。
背景技术:
2.当前,小型无人机技术已相当成熟,生产量大得惊人,得到了广泛应用。如:农田喷洒农药,电力线路施工、巡检及指挥,交通消防巡检和指挥,各种场合航拍,运送物品,特别是军事侦察和武力攻击等。
3.无人机使用过程中有以下几个要求:
4.1)无人机几乎都是使用储能电池作电源的,使用一段时间需要充电。这是一个重要问题。远程携带或运输,且需要有专人负责管理充换电,此项工作烦杂,成本高。最好在使用场所设置专用的停机库,实现自动换电池。
5.2)实现快速投放使用,最好在使用地附近,设置安全的机库,使用时,将就地换好电池的无人机,立即放飞。
6.目前,已有多种供无人机更换电池的装置,一部分采用高空更换或充电方式,运行不稳定,存在一定风险;一部分直接在停机机库中更换电池,此种方式大都采用人工更换,提高机库运营成本。
技术实现要素:
7.为克服现有技术的不足,本实用新型的目的是提供一种性能稳定的用于无人机的换电机构,实现安全稳定的无人机用锂电池更换。
8.为实现上述目的,本实用新型通过以下技术方案实现:
9.一种用于无人机的换电机构,包括伸缩机构、夹抱机构、升降推送机构,伸缩机构上设有夹抱机构,伸缩机构与升降推送机构连接,升降推送机构用于带动伸缩机构升降及水平往复移动;
10.所述的伸缩机构包括伸缩电机、皮带、带轮、联动轴、滑板、托盘,皮带设置在托盘两侧,联动轴两端固定连接有带轮,带轮与伸缩电机连接,带轮与皮带连接,滑板与皮带固定连接,滑板与托盘滑动连接,伸缩电机驱动带轮转动,进而带动滑板滑动,滑板与夹抱机构固定连接;夹抱机构用于夹持锂电池。
11.所述的升降推送机构包括平移部、升降部、转动部;
12.平移部包括底座、滑轨、滑块、丝杠、伺服电机,伺服电机通过联轴器与丝杠连接,伺服电机驱动丝杠转动,丝杠与滑块螺纹连接,滑块与滑轨滑动连接,滑轨固定在底座上,底座固定在库仓底部;滑轨与锂电池充电机构相互垂直设置;
13.升降部包括导轨、升降滑板、升降电机、同步皮带,升降滑板与同步皮带固定连接,升降电机驱动同步皮带运转进而带动升降滑板升降,升降滑板与导轨滑动连接,导轨底部与滑块固定连接;
14.转动部包括转动电机、转动齿轮、托板、电动伸缩缸、滑杆,转动电机的输出轴与转
动齿轮固定连接,托板边缘设有与转动齿轮相啮合的弧形齿条;托板上固定有电动伸缩缸,电动伸缩缸的活塞杆与托盘固定连接,托板与托盘通过滑杆滑动连接。
15.所述的转动部还包括支撑板件,支撑板件包括限位柱、支撑板,限位柱与托板固定连接,支撑板与升降滑板固定连接,支撑板上设有弧形孔,限位柱能够在弧形孔内滑动。
16.所述的夹抱机构包括夹抱电机、固定板、主动齿轮、从动齿轮、连杆一、连杆二、夹板,夹抱电机驱动主动齿轮转动,两个从动齿轮相互啮合,一个从动齿轮与主动齿轮啮合;两个从动齿轮分别与连杆一一端固定连接,连杆一另一端与夹板铰接,主动齿轮、从动齿轮、夹抱电机均连接在固定板上,连杆二一端与固定板固定连接,另一端与夹板铰接;固定板与托盘固定连接。
17.与现有技术相比,本实用新型的有益效果是:
18.用于无人机的换电机构结构合理、安全可靠,能够夹持无人机上的锂电池,实现拆装无人机的锂电池,并将锂电池移动到锂电池存放架或充电机构上,实现自动更换电池,提高无人机更换电池的效率。
附图说明
19.图1是无人机的结构示意图。
20.图2是无人机的锂电池结构示意图。
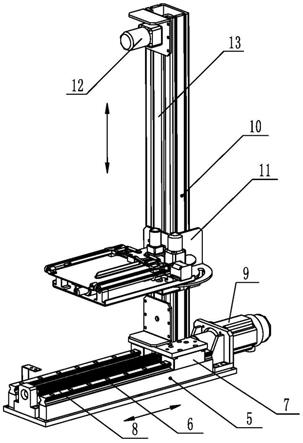
21.图3是升降推送机构的结构示意图。
22.图4是升降部的结构示意图。
23.图5是伸缩机构的结构示意图一。
24.图6是伸缩机构的结构示意图二。
25.图7是夹抱机构的结构示意图一。
26.图8是夹抱机构的结构示意图二。
27.图9是锂电池充电机构的结构示意图。
28.图10是锂电池充电机构与升降推送机构的相对位置示意图。
29.图中:1
‑
无人机2
‑
锂电池3
‑
充电插口4
‑
挂载支架5
‑
底座6
‑
滑轨7
‑
滑块8
‑
丝杠9
‑
伺服电机10
‑
导轨11
‑
升降滑板12
‑
升降电机13
‑
同步皮带14
‑
转动电机15
‑
转动齿轮16
‑
托板17
‑
同步带齿轮18
‑
弧形齿条19
‑
支撑板20
‑
伸缩电机21
‑
皮带22
‑
带轮23
‑
滑板24
‑
电动伸缩缸25
‑
托盘26
‑
夹抱电机27
‑
连杆一28
‑
固定板29
‑
主动齿轮30
‑
从动齿轮31
‑
连杆二32
‑
滑杆33
‑
联动轴34
‑
夹板35
‑
固定杆36
‑
限位滑板37
‑
放置板38
‑
充电插孔。
具体实施方式
30.下面结合说明书附图对本实用新型进行详细地描述,但是应该指出本实用新型的实施不限于以下的实施方式。
31.见图1、图2,无人机1上挂载锂电池2,锂电池2上固定连接有挂载支架4,并设置有充电插口3。
32.见图3
‑
图10,用于无人机的换电机构包括伸缩机构、夹抱机构、升降推送机构,伸缩机构上设有夹抱机构,伸缩机构与升降推送机构连接,升降推送机构用于带动伸缩机构升降及水平往复移动。
33.见图5、图6,伸缩机构包括伸缩电机20、皮带21、带轮22、联动轴33、滑板23、托盘25,皮带21设置在托盘25两侧,联动轴33两端固定连接有带轮22,带轮22与伸缩电机20连接,带轮22与皮带21连接,滑板23与皮带21固定连接,滑板23与托盘25滑动连接,伸缩电机20驱动带轮22转动,进而带动滑板23滑动,滑板23与夹抱机构固定连接;夹抱机构用于夹持锂电池28。
34.见图3、图4,升降推送机构包括平移部、升降部、转动部。转动部能够带动锂电池2实现90度转动,平移部包括底座5、滑轨6、滑块7、丝杠8、伺服电机9,伺服电机9通过联轴器与丝杠8连接,伺服电机9驱动丝杠8转动,丝杠8与滑块7螺纹连接,滑块7与滑轨6滑动连接,滑轨6固定在底座5上,底座5固定在库仓底部;滑轨6与锂电池2充电机构14相互垂直设置,见图10;升降部包括导轨10、升降滑板11、升降电机12、同步皮带13,升降滑板11与同步皮带13固定连接,升降电机12驱动同步带齿轮17转动,同步带齿轮17与同步皮带13连接,同步带齿轮17带动同步皮带13运转进而带动与同步皮带13固定的升降滑板11升降,升降滑板11与导轨10滑动连接,导轨10底部与滑块7固定连接;转动部包括转动电机14、转动齿轮15、托板16、电动伸缩缸24、滑杆32,转动电机14的输出轴与转动齿轮15固定连接,托板16边缘设有与转动齿轮15相啮合的弧形齿条18;托板16上固定有电动伸缩缸24,电动伸缩缸24的活塞杆与托盘25固定连接,托板16与托盘25通过滑杆32滑动连接。转动部还包括支撑板19件,支撑板19件包括限位柱、支撑板19,限位柱与托板16固定连接,支撑板19与升降滑板11固定连接,支撑板19上设有弧形孔,限位柱能够在弧形孔内滑动,见图5、图6。
35.见图7、图8,夹抱机构包括夹抱电机26、固定板28、主动齿轮29、从动齿轮30、连杆一27、连杆二31,夹抱电机26驱动主动齿轮29转动,两个从动齿轮30相互啮合,一个从动齿轮30与主动齿轮29啮合;两个从动齿轮30分别与连杆一27一端固定连接,连杆一27另一端与夹板34铰接,主动齿轮29、从动齿轮30、夹抱电机26均连接在固定板28上,连杆二31一端与固定板28固定连接,另一端与夹板34铰接;固定板28与托盘25固定连接,固定板28底部与固定杆35固定连接,通过固定杆35与滑板23连接,随滑板23移动带动固定板28往复移动。
36.见图9,锂电池2充电机构14或锂电池2存放架与升降推送机构相对设置,为取送方便,无人机停放位置与升降推送机构成直角布置。锂电池2充电机构14或锂电池2存放架为多层结构,每层均固定有放置板37,放置板37两侧设有限位滑板36,锂电池2充电机构的放置板37底端固定有充电插孔38。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1