一种监视混凝土运输车罐内状况的升降型转动折叠臂的制作方法
1.本实用新型涉及一种转动折叠臂,特别涉及一种监视混凝土运输车罐内状况的升降型转动折叠臂,属于液态混凝土运输领域。
背景技术:
2.混凝土在楼房、铁路、道路等基础建设领域中起到举足轻重的作用,混凝土质量的高低,关系到建筑质量的高低,特别是近年来,随着房地产、高铁事业的发展,楼房越来越高,铁路里程越来越长,混凝土的作用越来越重要,混凝土的质量好坏,直接关系到人民财产与生命安全,因此,混凝土的质量更加得到了建筑领域的重视,其质量把控也更加严格。
3.随着对环境保护的力度加大,为了防止混凝土在运输、搅拌时对环境的污染,混凝土搅拌主要由混凝土厂完成搅拌,然后,利用混凝土运输车在移动过程中一边搅拌一边移动,将液态混凝土运送到施工工地使用,运送前,在搅拌工厂按照到现场的距离以及使用时间的长短,合理的加入减水剂,可保证液态混凝土的合理凝固时间,以此加快施工进度。
4.然而,任何事情并非完全按照设想的那样顺利进展,往往会由于运输途中堵车、施工现场种种原因产生等待使用的情况,在这种情况下,由于是时间的原因,会出现混凝土难以从混凝土搅拌罐中倾倒出来的情况,甚至会产生结块等现象,不利于施工使用,更重要地是影响施工质量,如果添加水进行搅拌,会降低混凝土的质量,难以保证混凝土达到50mpa以上的规定强度,为了达到混凝土的保水性、和易性、粘聚性,需要向混凝土搅拌罐中添加适量的减水剂,专利号为202022053697.2公开了一种混凝土搅拌车中减水剂的加注装置,图7是侧漏加料漏斗的结构示意图。侧漏加料漏斗51从上方漏斗入口52加入液状混凝土,沿着侧面溜槽54流下,最后从漏斗出口53流出,进入混凝土运输车罐体朝向后面的开口内,减水剂加注装置55设置在漏斗出口53上方,需要注入碱水剂时,加注管延伸至下方进行加注,减水剂加注装置可以在运送和等待过程中,根据混凝土的粘稠度,添加减水剂,以此维护混凝土的使用质量,另外,为了对侧漏加料漏斗51以及混凝土搅拌罐中的状况进行观察或相关的操作,在液态混凝土运输车侧漏加料漏斗51两侧,设置有攀登台阶以及顶部平台,供司机上去观察罐内液态混凝土状况。
5.然而,是否添加减水剂,在添加减水剂的过程中,具体添加多少减水剂,需要司机攀登到混凝土运输罐上从混凝土运输罐的入口进行液态混凝土的状况确认,目视混凝土的粘稠度,进行适度添加减水剂,在确认过程中,不仅存在着攀登的危险性,而且需要多次攀登上去进行确认,会增大司机的疲劳程度,另外,由于在行车过程中,无法停车确认,更无法确定添加减水剂的多少,在这种情况下,有时会因为路途耽搁,出现混凝土质量问题。
6.为了能够确认混凝土运输罐内液态混凝土的粘稠度,曾想利用摄像头对混凝土运输罐内状况进行确认,然而,由于混凝土运输罐只有一个开口且与侧漏加料漏斗的漏斗出口相相对,其结构特殊,没有能够直接监视混凝土运输罐内状况的摄像头安装位置,因为混凝土侧漏加料漏斗需要向内部混凝土罐内加料,无法长期安装摄像头,如何能够减少司机反复攀登确认混凝土的粘稠度,如何能够在行驶过程中对混凝土罐中粘稠度进行确认,确
保在适当时间内添加减水剂,如何能够通过添加减水剂确保混凝土质量已经成为控制混凝土质量的重要课题。
技术实现要素:
7.针对液态混凝土粘稠度在运输途中无法停车确认的现实问题以及需要多次攀登上去进行确认粘稠状况问题,本实用新型提供一种监视混凝土运输车罐内状况的升降型转动折叠臂,其目的是为了免去司机反复攀登台阶对混凝土运输车罐内粘稠度的确认,减少司机的体力劳动,防止司机的疲劳驾驶,克服行车途中无法对罐内液态混凝土粘稠度确认的困难,实现了随时对液态混凝土的监视,可随时实施减水剂的添加和添加状态确认,可有效底把控混凝土的质量,保证施工质量。
8.本实用新型的技术方案是:一种监视混凝土运输车罐内状况的升降型转动折叠臂,包括摄像头以及监视器,所述升降型转动折叠臂包括升降装置,升降装置上方设置有转动装置,转动装置上固定有外侧延伸的抬高放低装置,抬高放低装置上连接有伸屈装置,其中,抬高放低装置包括大臂和抬高放低气缸,伸屈装置包括小臂和伸屈气缸,小臂伸展前,叠加在大臂上,伴随着大臂同步抬高放低和转动,小臂端部设置有夜视型摄像头,摄像头配备有监视器,摄像头朝向混凝土运输车罐内,升降型转动折叠臂与监视器均与控制电路板电连接,升降型转动折叠臂外部设置有隐藏护罩,底部设置在混凝土运输车攀登台阶最顶端,升降型转动折叠臂还配备有遥控装置;
9.进一步,升降装置包括升降气缸、外套筒和内套筒,外套筒套设在内套筒的外周,外套筒下端底部设置有底板,底板的最外周设置有隐藏护罩的底罩,底板中间内套筒内周固定有升降气缸,升降气缸的气缸杆杆端固定有端板,端板下面固定在内套筒的上端周边,端板上面通过支柱固定有顶板,顶板下面吊设有顶罩,内套筒随升降气缸沿外套筒内周同步升降;
10.进一步,所述转动装置设置在升降气缸杆端的端板上,转动装置包括旋转气缸,旋转气缸的气缸杆端部设置有大臂连接关节,大臂连接关节与大臂的根部铰接,旋转气缸缸体上端部不同位置分别设置有气缸杆水平方向旋转的始点限位板和终点限位板,转动装置使大臂在水平方向转动90度角度;
11.进一步,所述抬高放低装置包括抬高放低气缸,抬高放低气缸设置于大臂与转动装置上端部的大臂连接关节之间,抬高放低气缸主体底部铰接在连接关节侧面,抬高放低气缸的杆端铰接在大臂侧面的倾斜部件上,缸体铰接轴上设置有大臂放低时的旋转阻尼器,抬高放低气缸使大臂以大臂连接关节的缸体铰接轴为转动轴心,在向下的垂直方向与水平方向之间转动;
12.进一步,所述大臂的前端部铰接有小臂连接关节,小臂连接关节上设置有小臂折叠起点以及终点位置的折叠限位板,大臂端部以小臂端部折叠方向的内侧侧面设置有伸屈气缸,小臂转动角度为90度,小臂伸展前,在大臂垂直向下状态下,叠加贴靠在大臂靠近升降气缸主体一侧,大臂由垂直向下状态变为水平方向时,小臂叠加贴靠在大臂下方,小臂伸展后,小臂臂端旋转到垂直向下,小臂臂端部的夜视摄像头与混凝土搬运车的罐口相对,小臂和摄像头延伸至混凝土搬运车侧漏加料漏斗的溜槽上方;
13.进一步,所述隐藏护罩包括顶罩和底罩,顶罩上端吊着在顶板上,顶罩为伸缩袋,
顶板下方顶罩内侧设置有多个滑轮,顶罩上下端设置有罩架,顶罩内设置有与罩架平行且形状相同的支撑筋,顶罩的下罩架与底罩或底板之间途经滑轮固定有钢丝绳,升降装置上升后,顶罩压缩至顶板上,漏出升降型转动折叠臂上部,升降装置下降后,顶罩下降,顶罩的下罩架落在底罩顶部,将升降型转动折叠臂封闭在内侧;
14.进一步,所述升降装置、转动装置、抬高放低装置、伸屈装置的连接部位设置有各自的升降、旋转、伸屈的限位板,升降、旋转、伸屈的始点和终点限位板,其上设置有限位开关,限位开关经各自的模块连接至控制电路板,升降装置、转动装置、抬高放低装置、伸屈装置动作的气缸上经电磁阀连接有压缩空气;
15.进一步,所述遥控装置包括奥孔发射器和遥控接收器,电路板上配备有遥控发射器,遥控接收器中包括手模式、自动模式,手动模式下包括升降装置、转动装置、抬高放低装置、伸屈装置、摄像头、显示器的动作或开关按钮,监视器设置于驾驶室;
16.进一步,所述电路板上设置有包括升降装置、转动装置、抬高放低装置、伸屈装置、摄像头、显示器在内的动作模块或功能模块,各个动作气缸气管连接至各自的电磁阀,多个电磁阀组合设置在电路板上方,多个电磁阀分别经各自继电器分别与电路板电连接,限位开关的控制线路、摄像头的线路和气路从底板到外套筒之间固定在线架内,其上分别延伸至各自的限位开关、气缸以及摄像头;
17.进一步,所述升降装置的限位板呈“7”字形结构,上端固定在内套筒外周上端,下端延伸至外套筒外周,外套筒外周设置有对应的始点和终点限位开关。
18.本实用新型具有的积极效果是:通过在设置升降装置,能够利用升降装置中的气缸升高转动折叠臂,可使转动折叠臂从现有的混凝土运输车攀登台阶最顶端升高到侧漏加料漏斗的溜槽上方高度,有利于通过大臂延伸至侧漏加料漏斗的侧面溜槽上方,更有利于小臂从侧漏加料漏斗的溜槽上方向罐内摄像,获取罐内液态混凝土的实际情况,可根据情况判断是否添加减水剂,通过在大臂小臂;通过设置大臂抬高放低装置,能够使大臂在向下垂直方向与水平方向之间利用抬高放低气缸带动大臂以及小臂实施抬高放低动作;通过在连接关节侧面设置限位转板,可通过在限位转板上设置限位开关,将大臂转动时的起点、始点动作反馈到控制电路中,以便在自动模式或手动模式下依次实施下一步动作;通过在升降杆端的端板上设置转动装置,有利于大臂在旋转前从侧漏加料漏斗后方将大臂以及叠加的小臂一起从垂直向下的方向抬高到水平方向后,在水平面内转动90度,转动到侧漏加料漏斗的正上方,然后通过小臂伸直到朝下方向上,摄取罐内状况,也有利于相反方向的动作实施,如果直接在旋转后的位置实施大臂的抬高放低动作,就会与侧漏加料漏斗之间相互撞击;通过在大臂缸体铰接轴上设置旋转阻尼器,可在大臂连同小臂从水平方向向升降装置侧的垂直方向转动时,可防止自重带来的快速下降,可缓解气缸的负重;通过在大臂的前端部设置小臂连接关节,并在大臂和小臂下侧面设置伸屈气缸,有利于小臂在水平状况下,从与大臂的折叠状况转到向下方向,有利于小臂端部的摄像头朝向罐内,摄制罐内状况,同理,通过在小臂连接关节上设置不同位置的折叠限位板,可通过设置折叠限位开关,能够将动作到达起点和终点信息反馈至控制电路,有利于下一步的动作部件的开始;通过在升降型转动折叠臂外周设置底罩和顶罩,有利于在底罩上设置顶罩,有利于顶罩的叠加或升降,通过设置隐藏护罩,能够保护升降型转动折叠臂,可在非使用状况下,利用隐藏护罩保护,防止将水泥泥浆溅射到升降型转动折叠臂上,引起各个装置的脏污,避免加快装置的老化
或劣化,利用本实用新型,可免去司机反复攀登台阶对混凝土运输车罐内粘稠度的确认,降低司机的体力劳动,防止司机的疲劳驾驶,克服行车途中无法对罐内液态混凝土粘稠度确认的困难,实现了随时对液态混凝土的监视,可随时实施减水剂的添加和添加状态确认,可有效底把控混凝土的质量,保证施工质量。
附图说明
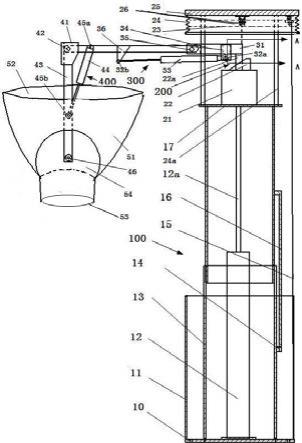
19.图1 本实用新型延伸至侧漏加料漏斗中的整体结构示意图。
20.图2 大臂连接关节结构示意图。
21.图3缸体铰接轴结构示意图。
22.图4阻尼连接器侧面的偏平轴孔结构示意图。
23.图5小臂连接关节结构示意图。
24.图6 电气与气动元件连接示意图。
25.图7侧漏加料漏斗的结构示意图。
26.标号说明:10-底板、11-底罩、12-升降气缸、12a-升降气缸杆、13-外套筒、14-内套筒、15-钢丝绳、16-升降装置的限位板、17-端板、21-旋转气缸、22-旋转限位板、22a-旋转气缸杆、23-支撑筋、24-顶罩、24a-支柱、25-顶板、26-滑轮、31-大臂连接关节、32a-缸体铰接轴、32b-缸杆交接轴、33-抬高放低气缸、34-缸体固定件、34a-固定螺孔、34b-铰接轴承、35-大臂铰接轴、36-倾斜部件、37-关节转轴孔、38-关节锁紧孔、39-旋转阻尼器、39a-扁状轴孔、41-小臂连接关节、42-小臂铰接轴、43-小臂、44-伸屈气缸44、45a-缸体转动轴、45b-杠杆转动轴、46-摄像头、47-小臂铰接轴轴孔、48a-小臂槽、48b-大臂槽、51-侧漏加料漏斗、52-漏斗入口、53-漏斗出口、54-侧面溜槽、55-减水剂加注装置、100-升降装置、200-转动装置、300-抬高放低装置、400-伸屈装置。
具体实施方式
27.为了使本领域技术人员进一步理解、本实用新型的技术方案,以下参照附图,进一步进行说明。
28.本实用新型的技术方案是一种监视混凝土运输车罐内状况的升降型转动折叠臂,图1是本实用新型延伸至侧漏加料漏斗中的整体结构示意图。包括是摄像头46以及监视器,所述升降型转动折叠臂包括升降装置100、升降装置100上部设置有转动装置200,转动装置200侧面利用大臂连接关节31铰接有抬高放低装置300,抬高放低装置300前端铰接有伸屈装置400,其中,抬高放低装置300包括大臂30和抬高放低气缸33,伸屈装置400包括小臂43和伸屈气缸44,小臂43伸展前,叠加在大臂30上,伴随着大臂30实施抬高放低和转动动作,小臂43端部设置有夜视型摄像头46,摄像头46配备有监视器,摄像头46朝向混凝土运输车罐内,升降型转动折叠臂与监视器均与控制电路板电连接,升降型转动折叠臂外部设置有隐藏护罩,升降型转动折叠臂底部设置在混凝土运输车攀登台阶最顶端,升降型转动折叠臂还配备有遥控装置。
29.升降装置100包括升降气缸12、外套筒13和内套筒14,外套筒13套设在内套筒14的外周,外套筒13下端底部设置有底板10,底板10的最外周设置有隐藏护罩的底罩11,底罩11为金属外壳,底板10中间内套筒14内周中心位置固定有升降气缸12,升降气缸12的气缸杆
杆端设置有端板17,端板17下面固定在内套筒14的上端周边,端板17上面通过支柱24a固定有顶板25,顶板25下表面周边吊设有顶罩24,顶罩24内周的顶板25下方设置有多个滑轮26,内套筒14随升降气缸12沿外套筒13内周同步升降。
30.在本实施例中,所述支柱24a设置有三根,主要是防止大臂30在水平方向旋转时相互干涉。
31.参照图1结合后叙图2,所述转动装置200设置在升降气缸杆12a端的端板17上,转动装置200包括旋转气缸21,大臂连接关节31利用关节锁紧孔38内的锁紧螺栓固定在旋转气缸杆22a端部端板17上,大臂连接关节31与大臂30根部之间利用关节转轴孔37内的大臂铰接轴35铰接,旋转气缸21缸体上端部不同位置分别设置有气缸杆水平方向旋转的始点限位板和终点限位板,转动装置200使大臂30在水平方向转动90度角度,旋转气缸缸体外周90度的方向上设置有两块与旋转气缸杆平行的旋转限位板22,旋转限位板22的内侧设置有旋转限位开关。
32.在本实施例中,大臂30抬高或放低时与混凝土运输车前后方向一致,摄像时,利用转动装置200将大臂连同叠加在其上的小臂43转向与前后方向垂直的左右方向,小臂伸直后延伸到侧漏加料漏斗51内朝向液态混凝土运输车的罐内。
33.图2 是大臂连接关节31结构示意图、图3是缸体铰接轴32a结构示意图、图4阻尼连接器侧面的偏平轴孔结构示意图,所述抬高放低装置300包括抬高放低气缸33,抬高放低气缸33设置于大臂30与大臂连接关节31上固定的缸体固定件34之间,大臂连接关节31设置在转动装置200上端部,抬高放低气缸33铰接在大臂连接关节31侧面的缸体固定件34上,缸体固定件34通过固定螺孔34a固定在大臂30靠近转动装置200一侧,抬高放低气缸33的气缸杆通过缸杆铰接轴32b铰接在大臂30侧面的倾斜部件36上,大臂30的缸体铰接轴32a上设置有大臂30放低时的旋转阻尼器39,抬高放低气缸33使大臂30以大臂连接关节31的缸体铰接轴32a为转动轴心,在向下的垂直方向与水平方向之间转动,旋转阻尼器39与缸杆铰接轴32b同步转动。
34.在本实施例中,缸体铰接轴32a与缸体固定件34之间的设置有铰接轴承34b,缸体铰接轴32a在缸体固定件34两侧为扁平轴,即:相对的两个面为平面,十字交叉方向为圆形结构,旋转阻尼器39与缸体铰接轴32a之间的连接通过扁状轴孔39a中的扁平轴连接,使得缸体铰接轴32a与旋转阻尼器39同时转动,所述旋转阻尼器39属于现有技术。
35.图5是小臂连接关节41结构示意图,伸屈装置400中,大臂30的前端部铰接有小臂连接关节41,小臂43根部插入在小臂连接关节41的小臂槽48a中,并与小臂连接关节41连为一体,大臂30端部插入在小臂连接关节41的大臂槽48b中,并通过小臂铰接轴42使小臂连接关节41与大臂30端部铰接,47为小臂连接关节41上小臂铰接轴42的小臂铰接轴轴孔,小臂连接关节41上设置有小臂43折叠起点以及终点位置的折叠限位板,大臂30端部以小臂43端部折叠方向的内侧侧面设置有伸屈气缸44,大臂30端部通过缸体转动轴45a与伸屈气缸44缸体根部连接,伸屈气缸44的气缸杆端部利用杠杆转动轴45b与小臂43前段部连接,小臂43转动角度为90度,小臂43伸展前,在大臂30垂直向下状态下,叠加贴靠在大臂30靠近升降气缸12主体一侧,大臂30由垂直向下状态变为水平方向时,小臂43叠加贴靠在大臂30下方,小臂43伸展后,小臂43臂端旋转到垂直向下,小臂43臂端部的夜视摄像头46与混凝土搬运车的罐口相对,小臂43和摄像头46延伸至混凝土搬运车侧漏加料漏斗51的溜槽上方。
36.所述隐藏护罩包括顶罩24和底罩11,顶罩24上端吊着在顶板25上,顶罩24为伸缩袋,顶板25下方顶罩24内侧设置有多个滑轮26,顶罩24上下端设置有罩架,顶罩24内设置有与罩架平行且形状相同的支撑筋23,顶罩24的下罩架与底罩11或底板10之间途经滑轮26固定有钢丝绳15,升降装置100上升后,顶罩24压缩至顶板25上,漏出升降型转动折叠臂上部,升降装置100下降后,顶罩24下降,顶罩24的下罩架落在底罩11顶部,将升降型转动折叠臂封闭在内侧。
37.在本实施例中,隐藏护罩为矩形结构,底罩11为固定结构,顶罩24为伸缩结构。
38.图6电气与气动元件连接示意图。图中,升降气缸12、旋转气缸21、抬高放低气缸33以及伸屈气缸44与各自的电磁阀之间为压缩空气管连接,其他连接为电连接,在各个模块组中包括动作前后起点与终点的模块,所述升降装置100、转动装置200、抬高放低装置300、伸屈装置400的连接部位分别设置有各自的升降、旋转、伸屈的始点和终点限位板,各个始点和终点限位板上分别设置有各自的限位开关,限位开关经各自的模块连接至控制电路板,升降装置100、转动装置200、抬高放低装置300、伸屈装置400动作气缸与电磁阀气路连接后,各个电磁阀分别经各自的继电器连接至电路板上。
39.在本实施例中,多个电磁阀组合在一个板上,与控制电路板叠加设置在一起,可节约空间,集中设置在液态混凝土运输车车后现有的平台上。
40.参照图7,所述电路板上配备有遥控发射器,遥控接收器中包括手模式、自动模式,手动模式下包括升降装置100、转动装置200、抬高放低装置300、伸屈装置400、摄像头46、显示器的动作或开关按钮。
41.所述遥控装置包括遥控发射器和遥控接收器,电路板上设置有包括升降装置100、转动装置200、抬高放低装置300、伸屈装置400、摄像头46、显示器在内的动作或功能模块,各个动作气缸气管连接至各自的电磁阀,多个电磁阀分别经各自继电器分别设置在电路板上,限位开关的控制线路及摄像头46电线和气路从底板10到外套筒13之间利用线架固定,其上分别延伸至各自的限位开关和气缸中;监视器设置于驾驶室。
42.所述升降装置100的限位板16呈“7”字形结构,上端固定在内套筒14外周上端,下端延伸至外套筒13外周,外套筒13外周设置有对应的始点和终点限位开关。
43.升降型转动折叠臂打开时的顺序为:可利用遥控器在自动模式下实施,也可在手动模式分步实施;
44.1、升降气缸12上升,带动其上的旋转气缸21、大臂30、小臂43一起上升;
45.2、抬高放低气缸33的气缸杆延伸,大臂30连同折叠在其上的小臂43从朝向液态混凝土运输车后方一侧由垂直向下方向以大臂铰接轴35为轴心,转向水平方向;
46.3、旋转气缸21带动大臂30、小臂43在水平面中,由朝向后方一侧方向转动90
°
转到朝向侧漏加料漏斗51一侧,大臂30连同折叠在其上的小臂43位于侧漏加料漏斗51的正上方;
47.4、在伸屈气缸44的带动下,小臂43以小臂铰接轴42为轴心,小臂43由水平方向离开大臂30转向垂直向下的方向上,此时,小臂43端部的摄像头46朝向液态混凝土运输车前方,摄像头46朝向液态混凝土运输车罐口;
48.5、摄像头46周边的灯光开启,对液态混凝土运输车罐内状况进行摄像,图像显示在罐内监视器上,司机可根据罐内具体情况,判断是否添加减水剂;
49.上述说明主要描述了升降型转动折叠臂的升高、抬高、旋转以及小臂伸展动作,其降低、放低、反向旋转以及小臂折叠动作与上述动作相反。
50.本实用新型通过在设置升降装置100,能够利用升降装置100中的升降气缸12升高转动折叠臂,可使转动折叠臂从现有的混凝土运输车攀登台阶最顶端升高到侧漏加料漏斗51的溜槽上方高度,有利于通过大臂30延伸至侧漏加料漏斗51内的侧面溜槽54上方,更有利于小臂43从侧漏加料漏斗51的溜槽上方向罐内摄像,获取罐内液态混凝土的实际情况,可根据情况判断是否添加减水剂;通过设置大臂30抬高放低装置300,能够使大臂30在向下垂直方向与水平方向之间利用抬高放低气缸33带动大臂30以及叠加的小臂43实施抬高放低动作;通过在大臂连接关节33侧面设置限位转板,可通过在限位转板上设置限位开关,将大臂30转动时的起点、始点动作反馈到控制电路中,以便在自动模式或手动模式下依次实施下一步动作;通过在升降杆端的端板17上设置转动装置200,有利于大臂30在旋转前从侧漏加料漏斗51后方将大臂30以及叠加的小臂43一起从垂直向下的方向抬高到水平方向后,在水平面内转动90度,转动到侧漏加料漏斗51的正上方,然后通过小臂43伸直到朝下方向上,摄取罐内状况,也有利于相反方向的动作实施,如果直接在旋转后的位置实施大臂30的抬高放低动作,就会与侧漏加料漏斗51之间相互撞击;通过在大臂30的缸体铰接轴32a上设置旋转阻尼器39,可在大臂30连同小臂43从水平方向向升降装置100侧的垂直方向转动时,可防止自重带来的快速下降,可缓解气缸的负重;通过在大臂30的前端部设置小臂连接关节41,并在大臂30和小臂43下侧面设置伸屈气缸44,有利于小臂43在水平状况下,从与大臂30的折叠状况转到向下方向,有利于小臂43端部的摄像头46朝向罐内,摄制罐内状况,同理,通过在小臂连接关节41上设置不同位置的折叠限位板,可通过设置折叠限位开关,能够将动作到达起点和终点信息反馈至控制电路,有利于下一步的动作部件的开始;通过在升降型转动折叠臂外周设置底罩11和顶罩24,有利于在底罩11上设置顶罩24,有利于顶罩24的叠加或升降,通过设置隐藏护罩,能够保护升降型转动折叠臂,可在非使用状况下,利用隐藏护罩保护,防止将水泥泥浆溅射到升降型转动折叠臂上,引起各个装置的脏污,避免加快装置的老化或劣化,利用本实用新型,可免去司机反复攀登台阶对混凝土运输车罐内粘稠度的确认,降低司机的体力劳动,防止司机的疲劳驾驶,克服行车途中无法对罐内液态混凝土粘稠度确认的困难,实现了随时对液态混凝土的监视,可随时实施减水剂的添加和添加状态确认,可有效底把控混凝土的质量,保证施工质量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1