一种具有阻尼及非线性力感特性的踏板行程模拟装置的制作方法
1.本实用新型属于车辆制动技术领域,尤其是涉及一种具有阻尼及非线性力感特性的踏板行程模拟装置。
背景技术:
2.随着电动汽车的快速普及和自动驾驶技术的不断发展,越来越多的汽车采用制动踏板与制动终端执行机构主要为制动器与具有制动能量回收的动力电机解耦的线控制动系统。制动踏板与终端执行机构解耦后,驾驶员施加于制动踏板上的位移输入被转化为电信号传递到电控系统并由终端执行机构实施制动,这使得驾驶员无法获得传统制动系统中由机械连接所产生的制动踏板感。因此,在线控制动系统中需要一种制动踏板行程模拟装置来为驾驶员提供制动踏板感。
3.现有的制动踏板行程模拟装置大多利用弹簧弹性力来提供制动踏板感,无法模拟理想踏板感的非线性刚度与阻尼特性。公开号为cn111301380a的发明专利申请提供了一种能够形成踏板组件的阻尼感和迟滞感的模拟机构,但存在以下明显不足:
4.(1)与常开电磁阀并联的单向阀位于储液罐和模拟缸工作腔之间,这使得输入推杆回位过程中若因回位过快造成人力缸工作腔出现真空时,储液罐制动介质在经过上述单向阀流向人力缸工作腔时须途经节流孔,而该节流孔产生的额外阻尼将导致人力缸工作腔不能及时补液并进而影响踏板及时回位和制动的及时解除;
5.(2)因常开电磁阀同样位于储液罐和模拟缸工作腔之间,这使得人力备份制动时人力缸工作腔内的制动介质在经该电磁阀流向储液罐时同样须途经节流孔,从而节流孔产生的额外阻尼使得踏板力增加并进而削弱人力备份制动效果。
6.除阻尼感和迟滞感要求外,优秀的汽车制动踏板感还要求踏板行程模拟装置应提供踏板刚度随踏板行程增加而逐渐增大的非线性踏板力感,这是踏板行程模拟装置设计时必须解决的问题。
技术实现要素:
7.本实用新型的目的是提供一种具有阻尼及非线性力感特性的踏板行程模拟装置,并满足人力缸补液及时、人力备份阻尼力尽可能小的使用要求。
8.为此本实用新型的技术方案如下:
9.一种具有阻尼及非线性力感特性的踏板行程模拟装置,包括阀体、安装在该阀体一侧的人力缸活塞、安装在该阀体另一侧的模拟缸缸体和模拟缸活塞以及输入推杆组件、推杆和踏板行程传感器,其中:
10.所述人力缸活塞和模拟缸活塞分别轴向安装在所述阀体两侧的相应内孔中且能沿轴向移动,二者分别与所述阀体相应内孔表面形成人力缸工作腔和模拟缸工作腔;
11.所述输入推杆组件通过一卡紧销抵靠在所述人力缸活塞末端的球窝中,人力缸活塞的活塞杆从阀体上的安装孔伸出后与所述推杆螺纹连接;在所述输入推杆组件和之间阀
体之间设置有回位弹簧,用于使所述输入推杆组件复位;
12.所述模拟缸缸体的端口以过盈配合方式压装在所述阀体的内孔中,且在所述模拟缸缸体与所述模拟缸活塞之间轴向布置有模拟缸弹性元件;
13.所述模拟缸活塞与所述模拟缸缸体内壁形成气腔;所述模拟缸缸体上设有气孔将气腔与大气连通;
14.在所述阀体内设置有四个流道,其中第一流道的一端通过所述人力缸活塞上的多个径向孔与所述人力缸工作腔连通,另一端与一储液罐连通;第二流道连通iso阀和所述人力缸工作腔;第三流道的一端通过第一和第二节流孔与所述模拟缸工作腔连通,另一端与所述人力缸工作腔连通;第四流道连通iso阀和所述储液罐;
15.所述踏板行程传感器用于将检测到的输入推杆组件的轴向位移传递至控制器,以实施线控制动。
16.具体的,所述模拟缸弹性元件包括模拟缸小弹簧、模拟缸大弹簧以及弹簧座,其中,所述模拟缸活塞为一端开口的中空缸体;所述弹簧座为“几”字形,其沿轴向滑动安装在形成于所述模拟缸缸体内的凸台上,且“几”字形的两个脚部远离所述模拟缸活塞;所述凸台端部形成有用于安装和容纳所述模拟缸小弹簧的环形台;所述模拟缸大弹簧的一端伸入所述模拟缸活塞内并与其内端固定连接,模拟缸大弹簧的另一端与所述弹簧座的“几”字形的脚部连接;所述模拟缸小弹簧的一端伸入并固定在所述弹簧座的“几”字形内,另一端安装在所述凸台的环形台上。优选的是,所述模拟缸大弹簧为渐变刚度弹簧。所述模拟缸大弹簧与模拟缸小弹簧组成的模拟缸弹性元件能够实现非线性力感特性的模拟,以满足理想踏板感的要求。
17.优选的是,所述第一节流孔和第二节流孔的孔径不同,这样不仅可模拟实现输入推杆组件轴向运动时的阻尼感和迟滞感,而且因两个节流口孔径不同和阻尼不同,可在制动介质加注时增加液体和气体在模拟缸工作腔与第三流道之间的流动性从而有利于加注时的排气。在本实用新型的一个实施例中,所述第一节流孔和第二节流孔的直径分别为1.75mm和1.2mm。
18.所述iso阀位于所述第二流道和第四流道之间,所述iso阀为常开电磁阀与单向阀的组合阀,所述单向阀单向连通储液罐至人力缸工作腔。
19.所述踏板行程模拟装置还包括多个密封装置,所述多个密封装置分别用于在所述人力缸活塞和阀体之间、所述人力缸活塞的活塞杆与阀体之间、所述模拟缸活塞和阀体之间以及所述模拟缸缸体和阀体之间形成密封。
20.当所述人力缸活塞位于初始位置时,人力缸活塞上的多个径向孔连通所述第一流道和人力缸工作腔,使得所述储液罐中的制动介质能够进入所述人力缸工作腔。
21.本实用新型在系统正常工作时,iso阀通电关闭,利用节流孔实现输入推杆组件轴向运动时的阻尼感和迟滞感,并利用模拟缸弹性元件的模拟缸小弹簧和渐变刚度大弹簧实现非线性力感特性的模拟。在电控失效时,iso阀断电打开,使得人力缸工作腔与储液罐连通,从而使人力备份制动时的输入推杆力不必克服模拟缸弹性元件的弹性力,可在推杆上产生更大的推力,以产生更大的人力备份制动力。
22.与现有技术相比,本实用新型具有以下优点和积极效果:
23.1.能够实现静态踏板力和踏板行程的非线性力感特性,满足优秀制动踏板感的踏
板行程模拟要求;
24.2.可提供输入推杆组件往复运动时的踏板阻尼感和踏板力相对踏板行程的迟滞感;
25.3.可用作失效人力备份时的供能装置,并可提供较大的人力备份制动推杆力,提升系统的安全性与可靠性。
附图说明
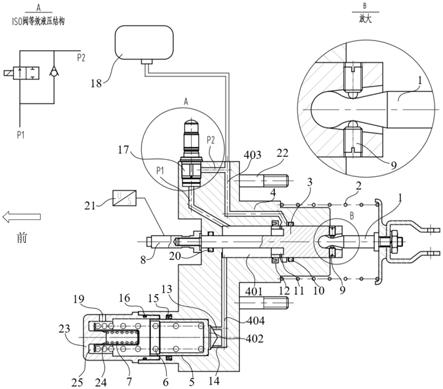
26.图1是本实用新型的具有阻尼及非线性力感特性的踏板行程模拟装置的结构示意图。图中:
27.1.输入推杆组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2.回位弹簧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3.人力缸活塞
28.4.阀体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
401.人力缸工作腔
ꢀꢀꢀꢀꢀꢀ
402.模拟缸工作腔
29.403.第一流道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
p1.第二流道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
404.第三流道
30.p2.第四流道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5.模拟缸活塞
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6.模拟缸大弹簧
31.7.模拟缸小弹簧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8.推杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9.卡紧销
32.10、16、20:o形圈
ꢀꢀꢀꢀꢀꢀ
11.径向孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12、15:皮碗
33.13、第一节流孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14、第二节流孔
ꢀꢀꢀꢀꢀꢀꢀꢀ
17.iso阀
34.18.储液罐
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
19.气孔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21.踏板行程传感器
35.22.安装螺栓
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
23.模拟缸缸体
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
24.弹簧座
36.25.气腔
具体实施方式
37.以下结合附图和实施例对本实用新型的结构作进一步详细说明。应当理解,此处所描述的具体实施例仅仅用于解释本实用新型,并非限定本实用新型的适用范围或保护范围。
38.实施例1
39.图1所示为本实用新型的具有阻尼及非线性力感特性的踏板行程模拟装置的一个实施例。所述踏板行程模拟装置包括:阀体4、输入推杆组件1、回位弹簧2、人力缸活塞3、模拟缸活塞5、模拟缸大弹簧6、模拟缸小弹簧7、弹簧座24、推杆8、卡紧销9、储液罐18及多个密封装置。
40.具体地说,所述输入推杆组件1通过卡紧销9抵靠在人力缸活塞3末端的球窝中;人力缸活塞3与模拟缸活塞5的两端分别支撑在阀体4的相应内孔中,并可沿阀体4轴向移动;人力缸活塞3与相应内孔的内表面形成人力缸工作腔401;模拟缸活塞5与相应内孔的内表面形成模拟缸工作腔402;模拟缸活塞5连接有模拟缸大弹簧6、模拟缸小弹簧7;模拟缸活塞5与模拟缸缸体23内壁形成气腔25;模拟缸缸体23上设有气孔19,将气腔与大气连通。
41.阀体4内分布有四组流道,其中第一流道403的一端通过人力缸活塞3上的多个径向孔11与人力缸工作腔401连通,另一端与储液罐18连通;第二流道p1连通iso阀17与人力缸工作腔401;第三流道404的一端通过第一和第二节流孔13、14与模拟缸工作腔402连通,另一端与人力缸工作腔401连通;第四流道p2连通iso阀17和储液罐18。
42.第一和第二节流孔13、14设置于第三流道404与模拟缸工作腔402之间,第一节流
孔13与第二节流孔14的直径分别为1.75mm和1.2mm。iso阀17为常开电磁阀与单向阀的组合阀,单向阀单向连通储液罐18至人力缸工作腔401。
43.所述多个密封装置包括设置在人力缸工作腔401外围的阀体4上且分别位于第一流道403两侧的皮碗12和o形圈10;设置在阀体4上,在人力缸活塞3的活塞杆和阀体4间形成密封的o形圈20;用于在模拟缸活塞5与阀体4间形成密封的皮碗15以及用于在模拟缸缸体23与阀体4间形成密封的o形圈16。
44.在人力缸活塞2位于初始位置时,人力缸活塞3上的多个径向孔11将第一流道403与人力缸工作腔401连通,使得储液罐18中的制动介质能够进入人力缸工作腔401。
45.踏板行程传感器21将检测到的输入推杆组件1的轴向位移传递至该装置的控制器中以实施线控制动。
46.本实用新型的模拟装置可通过安装螺栓22安装于需为线控制动提供踏板力感模拟的汽车等运载工具中。其工作过程和工作原理如下:
47.系统正常工作时,当输入推杆组件1在去程向前移动克服空行程时,人力缸活塞3在所述输入推杆组件1的推动下也克服空行程,此时径向孔11被皮碗12完全覆盖,第一流道403与人力缸工作腔401隔断;若径向孔11随人力缸活塞3继续向前轴向移动,将越过皮碗12,由于皮碗12的密封作用,使得第一流道403与人力缸工作腔401继续保持隔断状态。踏板行程传感器21检测到随输入推杆组件1和人力缸活塞3一同运动的推杆8的位移后,令iso阀17的常开电磁阀通电关闭,iso阀17的单向阀也关闭,人力缸工作腔401通过第二流道p1连通储液罐18的通道也关闭,人力缸内的制动介质只能通过第三流道404以及第一和第二节流孔13、14进入模拟缸工作腔402,并推动模拟缸活塞5压缩模拟缸弹性元件,模拟缸工作腔402和人力缸工作腔401建立起压力,且制动踏板行程越大则模拟缸工作腔402和人力缸工作腔401的压力以及踏板力亦越大。输入推杆组件1的去程阻尼主要由第一和第二节流孔13、14提供,而迟滞感主要由系统内各处的摩擦力提供。
48.输入推杆组件1回程时向后移动,在未回至空行程位置之前,人力缸工作腔401释放压力,由于模拟缸工作腔402的制动介质需途经第一和第二节流孔13、14进入人力缸工作腔401,因而可提供输入推杆组件1的回程阻尼,而迟滞感同样由系统内各处的摩擦力提供。回程若出现因输入推杆1回位过快造成人力缸工作腔401出现真空,则iso阀17的单向阀打开,储液罐18内的制动介质能够经第四流道p2、iso阀17的单向阀以及经第二流道p1进入人力缸工作腔401内实现及时补液,避免出现不良踏板感。
49.系统正常工作时若踩下制动踏板,踏板行程传感器感知到推杆有轴向位移,则令iso阀通电关闭,人力缸活塞向前轴向移动克服空行程后,第一流道与所述人力缸工作腔隔断,此时由于iso阀常开电磁阀通电关闭且其单向阀也关闭,所述人力缸工作腔的制动介质通过第三流道以及节流孔一与节流孔二进入模拟缸工作腔,并推动模拟缸活塞压缩模拟缸弹性元件,模拟缸工作腔和人力缸工作腔相应建立起压力,且制动踏板行程越大则模拟缸工作腔和人力缸工作腔压力以及踏板力亦越大。
50.当电控系统失效时,iso阀17处于断电开启状态,人力缸活塞3向前沿轴向移动克服空行程后,人力缸工作腔401经第一流道403与储液罐18的液压通路被隔断,但人力缸工作腔401内的制动介质能够通过开启的iso阀17与所述储液罐18连通,从而在所述人力缸活塞3移动过程中,人力缸工作腔401无法通过模拟缸建立压力,使得输入推杆组件1不必克服
模拟缸弹性元件的弹性力,也因此在推杆8上产生更大的推力,提升系统的人力备份效果。
51.模拟缸弹性元件包括模拟缸大弹簧6和模拟缸小弹簧7。模拟缸大弹簧6为渐变刚度弹簧,模拟缸小弹簧7为等刚度弹簧。当制动介质进入模拟缸工作腔402并推动模拟缸活塞5向前(图1中左侧)移动时,刚度较小的模拟缸小弹簧7首先被压缩产生线性弹性力,而模拟缸大弹簧6的变形可忽略。模拟缸活塞5继续压缩模拟缸小弹簧7至弹簧座24与模拟缸缸体内侧端部接触时,模拟缸小弹簧7不再起作用。此后,若模拟缸活塞5位移进一步加大,渐变刚度的模拟缸大弹簧6开始发挥作用,其刚度随压缩量增加而增加,从而产生非线性的弹性力。此时模拟缸总的弹性力包含模拟缸小弹簧7产生的固定弹性力与模拟缸大弹簧6产生的非线性弹性力。实物测试表明,该装置能够实现非线性力感特性的模拟,并满足理想踏板感的要求。
52.注意,上述仅为本实用新型的较佳实施例及所运用的技术原理。本领域技术人员会理解,本实用新型不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本实用新型的保护范围。因此,虽然通过以上实施例对本实用新型进行了较为详细的说明,但是本实用新型不仅仅限于以上实施例,在不脱离本实用新型构思的情况下,还可以包括更多其他等效实施例,而本实用新型的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1