一种火箭遥测控制车的制作方法
1.本发明涉及雷达设备技术领域,尤其涉及一种火箭遥测控制车。
背景技术:
2.随着国内商用卫星市场及民营火箭公司发展,卫星和火箭发射需求快速增长,商用卫星的需求量和火箭发射频率越来越高,对地面保障装备有了更多的需求和更高的要求,其中遥测控制车可以在复杂电磁环境下对飞行试验遥测目标跟踪,遥测信号接收、解调及处理等功能,作为地面保障装备的重要支柱,使用也越来越频繁;本发明对地面遥测指挥车系统性地进行优化提升。
技术实现要素:
3.针对现有技术中所存在的不足,发明提供了一种火箭遥测控制车,其对地面遥测指挥车系统性的进行优化提升。
4.根据发明的实施例,一种火箭遥测控制车,包括机动车本体,其还包括安装在所述机动车本体底盘顶侧的载物舱、指挥舱以及安装在所述载物舱内的雷达升降平台;
5.所述指挥舱固定安装在所述底盘上,为地面移动遥测平台;所述载物舱包括固定连接在所述底盘上的固定侧、滑动安装在底盘上的移动盖以及驱动所述移动盖移动的驱动机构;
6.所述移动盖滑动至远离所述固定侧时,所述移动盖位于所述指挥舱的外侧、露出所述载物舱内的所述雷达升降平台;所述移动盖滑动至与所述固定侧接触时,所述固定侧、所述移动盖以及所述指挥舱外侧壁形成容纳所述雷达升降平台的封闭空间;
7.所述雷达升降平台包括承接雷达的承载机构,以及驱动所述承载机构升降的升降机构。
8.本实施例中,载物舱为雷达升降平台提供储存及安装空间,雷达升降平台工作时,通过驱动机构驱动移动盖进行滑动,让其滑至远离固定侧,并让移动盖置于指挥舱外侧,露出雷达升降平台,并通过升降机构驱动承载机构及其上的雷达升出载物舱;雷达升降平台不工作时,通过升降机构收回雷达,通过驱动机构驱动移动盖进行滑动,让其滑至与固定侧抵触,让固定侧、移动盖以及指挥舱外侧壁形成容纳雷达升降平台的封闭空间,让雷达升降平台置于载物舱内,保障密封性及雷达在运输和储存时的安全;指挥舱内供工作人员进行地面移动遥测;移动盖通过滑移方式打开,能够使得载物舱完全露出,方便雷达升降平台的伸出、同样方便雷达升降平台整体吊装入舱内;本发明采用机动车本体、指挥舱、载物舱以及雷达升降平台四大模块的设计方式,在生产时,可以采用四个模块分别按图纸加工,分系统调试,最后合并组装调试即可完成整车生成,这样可以高效地组织生产,提高生产工艺性和生产效率。
9.进一步地,所述底盘上固定连接有平整的平板,所述固定侧以及所述指挥舱固定连接在所述平板上,所述平板上还固定连接有滑轨,所述移动盖上固定连接有与所述滑轨
滑动连接的滑块。
10.进一步地,所述驱动机构包括电动伸缩杆,所述移动盖上开设有容纳所述电动伸缩杆的连接槽,所述电动伸缩杆固定连接在所述指挥舱外侧壁上,所述电动伸缩杆的伸缩端伸入所述连接槽、并与所述移动盖固定连接。
11.进一步地,所述指挥舱安装有设备机柜、操作系统、空调系统、照明系统。
12.进一步地,所述承载机构与升降机构动力连接;所述升降机构包括:驱动模块、动力传递模块以及执行模块;所述动力传递模块设置有若干组;所述驱动模块与其中一组动力传递模块动力连接;所述执行模块动力连接于动力传递模块上;所述承载机构动力连接于执行模块上。
13.进一步地,所述驱动模块为电机;所述电机与转向器之间设置有减速器。
14.进一步地,所述动力传递模块包括转向器以及连接转轴;所述转向器之间使用连接转轴动力连接;所述驱动模块与其中一个转向器动力连接。
15.进一步地,所述承载机构为托盘;所述托盘边缘设置有与执行模块连接的连接件,所述托盘内部开设有放置槽;所述放置槽的中心设置有用于固定雷达的固定件。
16.进一步地,所述执行模块上凸起设置有挡片。
17.进一步地,还包括支撑模块;所述支撑模块包括:底座、顶板以及纵撑;所述纵撑一端与底座连接,另一端与顶板连接;所述顶板上开设有避让孔;所述动力传递模块固定于底座上;所述执行模块一端与动力传递模块动力连接另一端转动设置于顶板上。
18.相比于现有技术,本发明具有如下有益效果:
19.移动盖通过滑移方式打开,能够使得载物舱完全露出,方便雷达升降平台的伸出、同样方便雷达升降平台整体吊装入舱内;本发明采用机动车本体、指挥舱、载物舱以及雷达升降平台四大模块的设计方式,在生产时,可以采用四个模块分别按图纸加工,分系统调试,最后合并组装调试即可完成整车生成,这样可以高效地组织生产,提高生产工艺性和生产效率。
附图说明
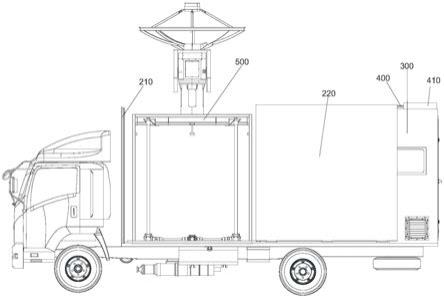
20.图1为本发明实施例火箭遥测控制车的总体结构示意图(雷达升降平台不工作时);
21.图2为本发明实施例火箭遥测控制车的右视剖面结构示意图;
22.图3为本发明实施例火箭遥测控制车的俯视剖面结构示意图;
23.图4为本发明实施例火箭遥测控制车的后视结构示意图;
24.图5为本发明实施例火箭遥测控制车的正视结构示意图;
25.图6为本发明实施例火箭遥测控制车的正视剖面结构示意图;
26.图7为图6中a处的放大示意图;
27.图8为图6中b处的放大示意图;
28.图9为本发明实施例火箭遥测控制车的总体结构示意图(雷达升降平台工作时);
29.图10为本发明实施例雷达升降平台的结构示意图;
30.图11为本发明实施例的动力传递模块的结构示意图。
31.上述附图中:100、机动车本体;110、平板;111、滑轨;200、载物舱;210、固定侧;
220、移动盖;221、滑块;222、连接槽;300、指挥舱;310、采光窗;320、进气口; 330、排气扇;340、设备机柜;350、乘员操作位;360、后舱门;370、电源壁盒;380、信号壁盒;400、电动伸缩杆;410、固定块;500、雷达升降平台;11、转向器;12、连接转轴;2、丝杆;3、托盘;31、放置槽;32、连接件;33、固定件;41、底座;42、纵撑;43、顶板;431、避让孔;5、电机;6、减速器;71、耳片;72、调节螺杆;73、支撑头;x、轴承封片。
具体实施方式
32.下面结合附图及实施例对本发明中的技术方案进一步说明。
33.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
34.一并参照图1~图11,本实施例提供了一种火箭遥测控制车,包括机动车本体100,其还包括安装在机动车本体100底盘顶侧的载物舱200、指挥舱300以及安装在载物舱200 内的雷达升降平台500;
35.指挥舱300固定安装在底盘上,为地面移动遥测平台;载物舱200包括固定连接在底盘上的固定侧210、滑动安装在底盘上的移动盖220以及驱动移动盖220移动的驱动机构;
36.移动盖220滑动至远离固定侧210时,移动盖220位于指挥舱300的外侧、露出载物舱200内的雷达升降平台500;移动盖220滑动至与固定侧210接触时,固定侧210、移动盖220以及指挥舱300外侧壁形成容纳雷达升降平台500的封闭空间;
37.雷达升降平台500包括承接雷达的承载机构,以及驱动承载机构升降的升降机构。
38.本实施例中,载物舱200为雷达升降平台500提供储存及安装空间,雷达升降平台500 工作时,通过驱动机构驱动移动盖220进行滑动,让其滑至远离固定侧210,并让移动盖 220置于指挥舱300外侧,露出雷达升降平台500,并通过升降机构驱动承载机构及其上的雷达升出载物舱200;雷达升降平台500不工作时,通过升降机构收回雷达,通过驱动机构驱动移动盖220进行滑动,让其滑至与固定侧210抵触,让固定侧210、移动盖220 以及指挥舱300外侧壁形成容纳雷达升降平台500的封闭空间,让雷达升降平台500置于载物舱200内,保障密封性及雷达在运输和储存时的安全;指挥舱300内供工作人员进行地面移动遥测;移动盖220通过滑移方式打开,能够使得载物舱200完全露出,方便雷达升降平台500的伸出、同样方便雷达升降平台500整体吊装入舱内;本发明采用机动车本体100、指挥舱300、载物舱200以及雷达升降平台500四大模块的设计方式,在生产时,可以采用四个模块分别按图纸加工,分系统调试,最后合并组装调试即可完成整车生成,这样可以高效地组织生产,提高生产工艺性和生产效率。
39.优选地,底盘上固定连接有平整的平板110,固定侧210以及指挥舱300固定连接在平板110上,平板110上还固定连接有滑轨111,移动盖220上固定连接有与滑轨111滑动连接的滑块221。
40.其中,如图1~图8所示,所述机动车本体100的底盘可根据产品功能需求匹配各型号成熟二类底盘,满足上装承载及运输要求即可,底盘上连接有平整的平板110,方便固定
侧210、指挥舱300的固定安装;指挥舱300为中空立方体状,指挥舱300两侧的平板110 上均固定连接有滑轨111,移动盖220为包括三块板的凹形结构,其底部的自由边固定连接有滑块221,通过滑块221与滑轨111之间的滑动连接,让移动盖220能够在平板110 上进行滑动,具体的,滑块221采用双边沟槽滚子滑块结构,保证导向和侧向稳定性。
41.优选地,驱动机构包括电动伸缩杆400,移动盖220上开设有容纳电动伸缩杆400的连接槽222,电动伸缩杆400固定连接在指挥舱300外侧壁上,电动伸缩杆400的伸缩端伸入连接槽222、并与移动盖220固定连接。
42.其中,如图1、图2、图4以及图9所示,指挥舱300的顶侧固定连接有固定块410,电动伸缩杆400的固定嵌装在固定块410内,从而让电动伸缩杆400固定连接在指挥舱300 的外侧壁上;电动伸缩杆400的伸缩端伸出时,向与伸缩端固定连接的移动盖220施加作用力,推动移动盖220向固定侧210靠近;电动伸缩杆400的伸缩端回缩时,带动移动盖 220向远离固定侧210的方向进行移动,而电动伸缩杆400伸入移动盖220上开设的连接槽222内,达到驱动移动盖220进行移动的功能;具体的,可以设置多根电动伸缩杆400 同时驱动移动盖220。
43.优选地,指挥舱300安装有设备机柜340、操作系统、空调系统、照明系统。
44.其中,如图1、图2、图3、图4以及图9所示,指挥舱300作为地面移动遥测平台其内安装有设备机柜340、工作台、遥测接收机、伺服控制器、网络交换机和监控终端等设备;指挥舱300一侧壁上还安装有能够透光的采光窗310以及供空气进入指挥舱300内的的进气口320,另一相对的侧壁上设置有排气扇330,后侧壁上安装有供人员进出的后舱门360、提供电源的电源壁盒370以及提供信号的信号壁盒380;指挥舱300内部固定安装有一个设备机柜340,设备机柜340的两侧安装有乘员操作位350;而指挥舱300内空调系统、照明系统等设备均可以参照现有技术进行设置。
45.具体的,指挥舱300采用大板骨架及蒙皮结构,内外表面蒙皮为防锈铝板,内蒙板与骨架的接触面设置隔热断桥,该断桥为阻燃木质材料,板片内部填充聚氨酯保温材料,指挥舱300侧壁板厚度达到50mm,让指挥舱300具备隔热保温和密封性能,根据测试,指挥舱300能在环境温度-45℃~+55℃时正常工作。
46.具体的,载物舱200整体内部尺寸略大于指挥舱300外廓尺寸,以使得载物舱200上的移动盖220能套装于指挥舱300外(指挥舱300外廓尺寸:l
×w×
h=3020mm
×
2200mm
×ꢀ
2270mm;载物舱200内廓尺寸:l
×w×
h=2400mm
×
2280mm
×
2250mm)。
47.如图10~图11所示:包括升降机构以及承载机构;承载机构与升降机构动力连接,使得升降机构能够带动承载机构在竖直方向上往复运动;升降机构包括:驱动模块、动力传递模块以及执行模块;动力传递模块设置有若干组;驱动模块与其中一组动力传递模块动力连接;执行模块动力连接于动力传递模块上;承载机构动力连接于执行模块上。
48.动力传递模块包括转向器11以及连接转轴12;转向器11之间使用连接转轴12动力连接;驱动模块与其中一个转向器11动力连接,在本实施例中,转向器11共设置有五个,包括一个三通转向器,两个直角转向器以及两个单通转向器;每个相邻的转向器11之间使用连接转轴12动力连接;连接转轴12与转向器11使用插接接头实现可拆卸安装(转向器11与连接转轴12为现有设备,二者成组出现,关于其运行原理在此无需详细介绍);驱动模块与三通转向器动力连接,驱动模块为电机5;三通转向器能将电机5输出端的转动传递与每个转向器11上,再传递到每个执行模块上,由此带动承载机构升降;在电机5 与转向器11之间
设置有减速器6,用于降低电机5转速,适配承载机构的设定升降速度。
49.执行模块为丝杆2,承载机构为托盘3;托盘3边缘设置有与执行模块连接的连接件 32,连接件32为三角形结构的角片,角片上开设有螺纹孔,用于与丝杆2螺纹连接;在本实施例中,托盘3为正八边形结构,角片设置于四个相对的侧面上,因此丝杆2也设置有四根,分别与直角转向器11以及单通转向器11动力连接。
50.托盘3内部开设有放置槽31;放置槽31的中心设置有用于固定雷达的固定件33,固定件33为连接法兰,雷达就固定于连接法兰上。
51.执行模块上凸起设置有圆形的挡片,挡片用于对托盘3进行纵向限位,防止其压到转向器11。
52.还包括支撑模块;支撑模块包括:底座41、顶板43以及纵撑42;纵撑42一端与底座41连接,另一端与顶板43连接,底座41、顶板43以及纵撑42共同构成矩形的框架结构;顶板43上开设有避让孔431,用于供雷达伸出;动力传递模块(也就是转向器11与连接转轴12)固定于底座41上;执行模块一端与动力传递模块动力连接另一端转动设置于顶板43上,在每根丝杆2的顶端设置有轴承封片x,轴承封片x包括轴承与封片;轴承固定于封片中心位置,封片的边缘开设有螺丝孔;丝杆2的顶端插设于轴承内,再通过封片固定于顶板43的下底面。
53.托盘3的侧面设置有支撑组件;支撑组件包括:耳片71、调节螺杆72以及支撑头73;耳片71固定于托盘3的侧面;调节螺杆72与耳片71螺纹连接,用于调节支撑头73的行程;支撑头73固定于调节螺杆72的端面上,支撑组件的作用是对托盘3在底座41上起到支撑作用,因为雷达较重,单靠挡片支撑并不安全,因此使用支撑组件来对托盘3进行支撑。
54.相比于现有技术,本发明的移动盖通过滑移方式打开,能够使得载物舱完全露出,方便雷达升降平台的伸出、同样方便雷达升降平台整体吊装入舱内;本发明采用机动车本体、指挥舱、载物舱以及雷达升降平台四大模块的设计方式,在生产时,可以采用四个模块分别按图纸加工,分系统调试,最后合并组装调试即可完成整车生成,这样可以高效地组织生产,提高生产工艺性和生产效率;同时本发明具备雷达快速升降系统,雷达存储舱可快速打开及闭合,整车具备良好的路面适应性,可在各种路面快速机动转移,整车系统能满足在极端低温的环境中,对火箭及卫星进行遥测跟踪指挥,各系统采用模块化设计,各分系统可做定制,同时各分系统能快速安装及调试。
55.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1