一种半速度环半加速度环的无人驾驶车辆控制方法与流程
1.本发明涉及一种半速度环半加速度环的无人驾驶车辆控制方法。
背景技术:
2.随着汽车电动化及智能化的快速发展,无人驾驶汽车成为未来出行的一种选择。而无人驾驶汽车对整车控制系统的可靠性、安全性、舒适性提出了更高的要求,该车辆控制方法在传统有人驾驶车辆的控制方法基础上进行优化,提升了车辆控制系统的稳定性。
3.对于有人驾驶汽车,优先选择驱动扭矩控制,制动制动力控制的策略,结合驾驶员-车闭环控制系统,实现驾驶员良好的驾乘感受。对于无人驾驶汽车,决策层通常会同时规划路径及通过车速,从而简化决策层代码执行效率。
4.针对无人驾驶车辆的决策特点,大对数无人驾驶车辆底层会选择转速控制型驱动系统,以便直接响应来自决策层的指令。即在驱动过程中,驱动电机控制器(mcu)执行速度环闭环控制。
5.但是常见的电-液制动系统(ehb)受工作原理限制,对液压力响应灵敏,精度高。所以,制动系统中理想的控制方式是制动力或液压力闭环控制,再结合整车质量、滑行阻力等参数的标定结果,进而表现为对整车减速度进行闭环控制。由此可见,驱动、制动过程中闭环控制物理量的不同,所以导致在制动过程中,可能存在互为干扰的情况,导致车辆制动效果差以及能耗增加等问题。
技术实现要素:
6.鉴于现有技术中存在的上述问题,本发明的主要目的在于提供一种半速度环半加速度环的无人驾驶车辆控制方法,通过本发明的控制方法,无人驾驶车辆在加速过程中,保证具有更精确的加速度控制精度;以及无人驾驶车辆在减速过程中,保证具有更精确的减速度控制精度,从而保证无人驾驶车辆同时具备安全性以及舒适性的优点。
7.本发明的技术方案是这样的:
8.一种半速度环半加速度环的无人驾驶车辆控制方法,该无人车辆控制方法用于对无人驾驶车辆进行控制,包括:
9.对于无人驾驶汽车决策层,同时下发车速及加/减速度指令;
10.同时对于无人驾驶汽车底层,结合决策层指令情况,判断执行速度或加速度闭环控制,其中:
11.所述决策层指令情况包括以下情况:车速>0且加速度>0、车速>0且加速度=0以及车速>0且加速度<0。
12.当所述决策层指令情况为车速>0且加速度>0或加速度=0时:所述无人驾驶车辆的mcu单元工作状态为工作,且速度闭环控制启动;所述无人驾驶车辆的ehb单元工作状态为不工作,且加速度闭环控制不启动。
13.当所述决策层指令情况为车速>0且加速度<0时:所述无人驾驶车辆的mcu单元
工作状态为不工作,且速度闭环控制不启动;所述无人驾驶车辆的ehb单元工作状态为工作,且加速度闭环控制启动。
14.所述无人驾驶车辆上设置有imu单元,且所述无人驾驶车辆的坡度i为:i=0%、i≤20%以及i>20%。
15.当所述无人驾驶车辆的坡度i=0%时,且当所述决策层指令情况为车速>0且加速度>0或加速度=0时:所述无人驾驶车辆的mcu单元工作状态为工作,且速度闭环控制启动;所述无人驾驶车辆的ehb单元工作状态为不工作,且加速度闭环控制不启动。
16.当所述无人驾驶车辆的坡度i=0%时,且当所述决策层指令情况为车速>0且加速度<0时:所述无人驾驶车辆的mcu单元工作状态为不工作,且速度闭环控制不启动;所述无人驾驶车辆的ehb单元工作状态为工作,且加速度闭环控制启动。
17.当所述无人驾驶车辆的坡度i≤20%下坡时,且当所述决策层指令情况为车速>0且加速度>0或加速度=0时:所述无人驾驶车辆的mcu单元工作状态为工作,且速度闭环控制启动;所述无人驾驶车辆的ehb单元工作状态为不工作,且加速度闭环控制不启动。
18.当所述无人驾驶车辆的坡度i≤20%下坡时,且当所述决策层指令情况为车速>0且加速度<0时:所述无人驾驶车辆的mcu单元工作状态为不工作,且速度闭环控制不启动;所述无人驾驶车辆的ehb单元工作状态为工作,且加速度闭环控制启动。
19.当所述无人驾驶车辆的坡度i>20%下坡时,且当所述决策层指令情况为车速>0且加速度<0.2g时:所述无人驾驶车辆的mcu单元工作状态为不工作,且速度闭环控制不启动;所述无人驾驶车辆的ehb单元工作状态为工作,且加速度闭环控制启动;当所述无人驾驶车辆的坡度i>20%下坡时,且当所述决策层指令情况为车速>0且加速度<0.2g时:所述无人驾驶车辆的mcu单元工作状态为工作,且速度闭环控制启动;所述无人驾驶车辆的ehb单元工作状态为不工作,且加速度闭环控制不启动。
20.当所述无人驾驶车辆的坡度i>20%下坡时,且当所述决策层指令情况为车速>0且加速度=0或加速度<0或时:所述无人驾驶车辆的mcu单元工作状态为不工作,且速度闭环控制不启动;所述无人驾驶车辆的ehb单元工作状态为工作,且加速度闭环控制启动。
21.本发明具有以下优点和有益效果:本发明实施例提供的半速度环半加速度环的无人驾驶车辆控制方法,对于无人驾驶汽车决策层,同时下发车速及加/减速度指令;同时对于无人驾驶汽车底层,结合决策层指令情况,判断执行速度或加速度闭环控制,其中:所述决策层指令情况包括以下情况:车速>0且加速度>0、车速>0且加速度=0以及车速>0且加速度<0;通过本发明提供的半速度环半加速度环的无人驾驶车辆控制方法,车辆可以在加速过程中,保证具有更精确的车速控制精度;在减速过程中,保证具有更精确的减速度控制精度,从而保证无人驾驶车辆同时具备安全性以及舒适性的优点。
具体实施方式
22.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域
普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.下面将参照具体实施例对本发明作进一步的说明。
24.本发明实施例提供的半速度环半加速度环的无人驾驶车辆控制方法,该无人车辆控制方法用于对无人驾驶车辆进行控制,包括:
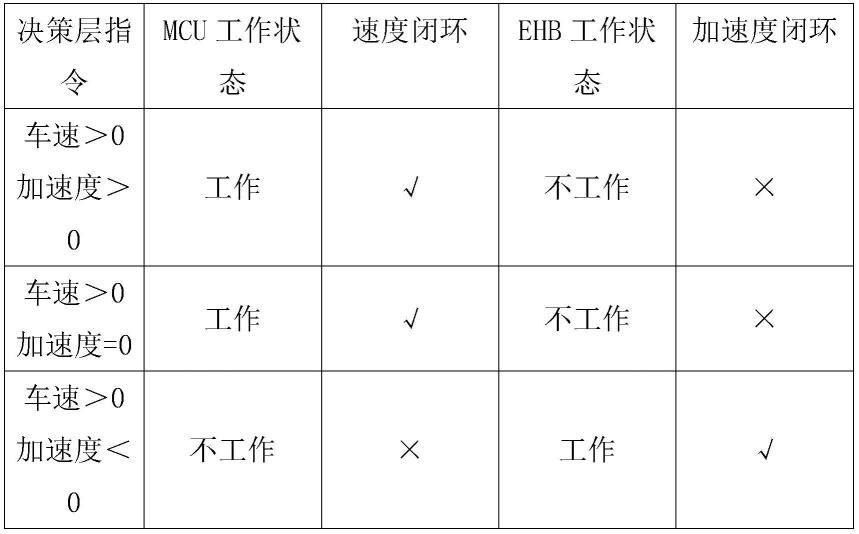
25.对于无人驾驶汽车决策层,同时下发车速及加/减速度指令;同时对于无人驾驶汽车底层,结合决策层指令情况,判断执行速度或加速度闭环控制,其中:所述决策层指令情况包括以下情况:车速>0且加速度>0、车速>0且加速度=0以及车速>0且加速度<0,如下表1所示。
26.表1
[0027][0028]
如表1所示,当所述决策层指令情况为车速>0且加速度>0或加速度=0时:
[0029]
所述无人驾驶车辆的mcu单元工作状态为工作,且速度闭环控制启动;
[0030]
所述无人驾驶车辆的ehb单元工作状态为不工作,且加速度闭环控制不启动。
[0031]
如表1所示,当所述决策层指令情况为车速>0且加速度<0时:
[0032]
所述无人驾驶车辆的mcu单元工作状态为不工作,且速度闭环控制不启动;
[0033]
所述无人驾驶车辆的ehb单元工作状态为工作,且加速度闭环控制启动。
[0034]
当无人驾驶车辆上设置有imu单元(惯性测量单元),可结合坡度情况,且所述无人驾驶车辆的坡度i为:i=0%、i≤20%以及i>20%,如下表2所示。
[0035]
表2
[0036][0037]
当所述无人驾驶车辆的坡度i=0%时,且当所述决策层指令情况为车速>0且加速度>0或加速度=0时:
[0038]
所述无人驾驶车辆的mcu单元工作状态为工作,且速度闭环控制启动;
[0039]
所述无人驾驶车辆的ehb单元工作状态为不工作,且加速度闭环控制不启动。
[0040]
如表2所示,当所述无人驾驶车辆的坡度i=0%时,且当所述决策层指令情况为车速>0且加速度<0时:
[0041]
所述无人驾驶车辆的mcu单元工作状态为不工作,且速度闭环控制不启动;
[0042]
所述无人驾驶车辆的ehb单元工作状态为工作,且加速度闭环控制启动。
[0043]
当所述无人驾驶车辆的坡度i≤20%下坡时,且当所述决策层指令情况为车速>0且加速度>0或加速度=0时:
[0044]
所述无人驾驶车辆的mcu单元工作状态为工作,且速度闭环控制启动;
[0045]
所述无人驾驶车辆的ehb单元工作状态为不工作,且加速度闭环控制不启动。
[0046]
如表2所示,当所述无人驾驶车辆的坡度i≤20%下坡时,且当所述决策层指令情况为车速>0且加速度<0时:
[0047]
所述无人驾驶车辆的mcu单元工作状态为不工作,且速度闭环控制不启动;
[0048]
所述无人驾驶车辆的ehb单元工作状态为工作,且加速度闭环控制启动。
[0049]
当所述无人驾驶车辆的坡度i>20%下坡时,且当所述决策层指令情况为车速>0且加速度<0.2g时:
[0050]
所述无人驾驶车辆的mcu单元工作状态为不工作,且速度闭环控制不启动;
[0051]
所述无人驾驶车辆的ehb单元工作状态为工作,且加速度闭环控制启动;
[0052]
如表2所示,当所述无人驾驶车辆的坡度i>20%下坡时,且当所述决策层指令情况为车速>0且加速度<0.2g时:
[0053]
所述无人驾驶车辆的mcu单元工作状态为工作,且速度闭环控制启动;
[0054]
所述无人驾驶车辆的ehb单元工作状态为不工作,且加速度闭环控制不启动。
[0055]
如表2所示,当所述无人驾驶车辆的坡度i>20%下坡时,且当所述决策层指令情况为车速>0且加速度=0或加速度<0或时:
[0056]
所述无人驾驶车辆的mcu单元工作状态为不工作,且速度闭环控制不启动;
[0057]
所述无人驾驶车辆的ehb单元工作状态为工作,且加速度闭环控制启动。
[0058]
本发明实施例提供的半速度环半加速度环的无人驾驶车辆控制方法,可使无人驾驶车辆在加速过程中,保证具有更精确的车速控制精度;同时,无人驾驶车辆在减速过程中,保证具有更精确的减速度控制精度,从而保证无人驾驶车辆同时具备安全性以及舒适性的优点。
[0059]
最后应说明的是:以上所述的各实施例仅用于说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或全部技术特征进行等同替换;而这些修改或替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1