基于前车运行状态的自动紧急避让系统及控制方法与流程
1.本发明涉及自动驾驶技术领域,具体地指一种基于前车运行状态的自动紧急避让系统及控制方法。
背景技术:
2.在车辆正常行驶场景中,经常会遇到如此场景:本车车辆a、与同车道前方车辆b正常行驶,车辆b的同车道前方车辆c因为急刹或者车辆故障紧急停车,当车辆b发现前方车辆c异常后,通过紧急转向避障,由于本车车辆a没有足够时间进行制动或者紧急转向,进而引发追尾事故。
3.目前常规方案:通过车辆a上的传感器采集到前向车道内车辆的运动信息,通过aeb计算模块判断是否存在碰撞风险,若存在碰撞风险,且驾驶员没有做出反应时,则进行碰撞预警和紧急制动灯一系列动作。但是在上述场景中,由于车辆b的存在,车辆a驾驶员视线和adas传感器(摄像头+毫米波雷达)探测路线受到遮挡,无法准确识别出车辆c的存在。发出的碰撞预警和减速度指令滞后,使得驾驶员没有足够的反应时间进行避让。
技术实现要素:
4.本发明的目的就是要克服上述现有技术存在的不足,提供一种基于前车运行状态的自动紧急避让系统及控制方法,基于前车的运行状态提前预判风险,并提前作出紧急避让措施,提高车辆驾驶安全性。
5.为实现上述目的,本发明提供一种基于前车运行状态的自动紧急避让系统,包括运行参数获取模块、车辆感知系统、控制单元、语音提示模块;
6.所述运行参数获取模块用于获取本车辆的运行参数;
7.所述车辆感知系统用于在识别距离内识别前方同车道内存在第一前方车辆和第二前方车辆时,采集第一前方车辆和第二前方车辆的运行参数;并获取本车辆与第一前方车辆的第一碰撞时间、本车辆与第二前方车辆的第二碰撞时间、第一前方车辆的变道预测时间;所述第一前方车辆为与本车辆距离最近的前方车辆,所述第二前方车辆为与本车辆距离第二近的前方车辆;
8.所述控制单元用于判断当第一碰撞时间小于或等于变道预测时间时,若第一碰撞时间或第二碰撞时间小于第一设定阈值,控制语音提示模块进行警示和制动提醒,若第一碰撞时间和第二碰撞时间均大于第一设定阈值,则不进行任何控制;
9.所述控制单元还用于判断当第一碰撞时间大于变道预测时间时,若第二碰撞时间小于或等于第一设定阈值时,控制语音提示模块进行警示和制动提醒,若第一碰撞时间大于第一设定阈值,则不进行任何控制。
10.进一步地,所述车辆感知系统还用于在识别距离内识别前方同车道内仅存在前方第一车辆时,采集前方第一车辆的运行参数,获取本车辆与第一前方车辆的第一碰撞时间、第一前方车辆的横向速度和横向位移;所述所述控制单元用于判断当第一前方车辆的横向
速度大于设定横向速度、或第一前方车辆的横向位移大于设定横向位移时,若第一碰撞时间小于第二设定阈值,控制语音提示模块进行警示和制动提醒,所述第二设定阈值大于第一设定阈值。
11.进一步地,所述车辆感知系统还用于在识别距离内识别前方同车道内仅存在前方第一车辆时,所述控制单元用于判断当第一前方车辆的横向速度小于或等于设定横向速度、且第一前方车辆的横向位移小于或等于设定横向位移时,若第一碰撞时间小于第一设定阈值,控制语音提示模块进行警示和制动提醒。
12.进一步地,所述车辆感知系统还用于获取第一前方车辆当前时刻的横向位置到横向变道完成时的横向距离,获取横向距离与第一前方车辆横向速度的除数作为第一前方车辆的变道预测时间。
13.进一步地,所述控制单元用于判断:当语音提示模块进行警示和制动提醒后,若第一碰撞时间或第二碰撞时间小于或等于第三设定阈值时,所述第三设定阈值小于第一设定阈值,控制本车辆进入自动紧急避让模式。
14.进一步地,在自动紧急避让模式中,所述车辆感知系统还用于获取相邻车道的车况和路况,得到本车辆变道后与相邻车道最近前方车辆的第三碰撞时间、与相邻车道最近后方车辆的第四碰撞时间和道路曲率,所述控制单元用于判断当第三碰撞时间大于第一设定阈值、且第四碰撞时间大于第一设定阈值、且道路曲率小于或等于设定曲率时,控制转向系统进行自动转向变道。
15.进一步地,在自动紧急避让模式中,所述控制单元还用于判断当第三碰撞时间小于或等于第一设定阈值、或第四碰撞时间小于或等于第一设定阈值、或道路曲率大于设定曲率时,控制制动系统进行自动紧急制动。
16.本发明还提供一种基于前车运行状态的自动紧急避让系统的控制方法,包括:
17.当在识别距离之内识别到前方同车道内存在第一前方车辆和第二前方车辆时,采集本车辆、第一前方车辆和第二前方车辆的运行参数,所述第一前方车辆为与本车辆距离最近的前方车辆,所述第二前方车辆为与本车辆距离第二近的前方车辆;
18.得到本车辆与第一前方车辆的第一碰撞时间、本车辆与第二前方车辆的第二碰撞时间、第一前方车辆的变道预测时间;
19.当第一碰撞时间小于或等于变道预测时间时,若第一碰撞时间或第二碰撞时间小于第一设定阈值,进行警示和制动提醒,若第一碰撞时间和第二碰撞时间均大于第一设定阈值,则不进行任何控制;
20.当第一碰撞时间大于变道预测时间时,若第二碰撞时间小于或等于第一设定阈值时,进行警示和制动提醒,若第一碰撞时间大于第一设定阈值,则不进行任何控制。
21.进一步地,当在识别距离内识别前方同车道内仅存在前方第一车辆,采集本车辆与前方第一车辆的运行参数,本车辆与第一前方车辆的第一碰撞时间、第一前方车辆的横向速度和横向位移,当第一前方车辆的横向速度大于设定横向速度、或第一前方车辆的横向位移大于设定横向位移时,若第一碰撞时间小于第二设定阈值,进行警示和制动提醒,所述第二设定阈值大于第一设定阈值。
22.进一步地,在识别距离内识别前方同车道内仅存在前方第一车辆时,当第一前方车辆的横向速度小于或等于设定横向速度、且第一前方车辆的横向位移小于或等于设定横
向位移时,若第一碰撞时间小于第一设定阈值,进行警示和制动提醒。
23.进一步地,第一前方车辆的变道预测时间的确定方法包括,获取第一前方车辆当前时刻的横向位置到横向变道完成时的横向距离,获取横向距离与第一前方车辆横向速度的除数。
24.进一步地,当进行制动提醒时,制动系统提前建压,使制动液填充制动管路。
25.进一步地,当进行警示和制动提醒后,若第一碰撞时间或第二碰撞时间小于或等于第三设定阈值时,本车辆进入自动紧急避让模式,所述第三设定阈值小于第一设定阈值。
26.进一步地,在自动紧急避让模式中,还获取相邻车道的车况和路况,得到本车辆变道后与相邻车道最近前方车辆的第三碰撞时间、与相邻车道最近后方车辆的第四碰撞时间和道路曲率,当第三碰撞时间大于第一设定阈值、且第四碰撞时间大于第一设定阈值、且道路曲率小于或等于设定曲率时,本车辆进行自动转向变更。
27.进一步地,在自动紧急避让模式中,当第三碰撞时间小于或等于第一设定阈值、或第四碰撞时间小于或等于第一设定阈值、或道路曲率大于设定曲率时,本车辆进行自动紧急制动。
28.本发明的有益效果:提前预判风险并进行紧急避让,提高车辆驾驶安全性。本发明可以同时根据第一前方车辆和第二前方车辆的运行参数来判断本车辆与前方车辆碰撞的风险,当第一碰撞时间大于变道预测时间时,说明第一前方车辆在与本车辆碰撞前就完成变道,仅需根据第二碰撞时间与第一设定阈值的大小来判断是否进行警示和制动提醒;当第一碰撞时间小于或等于变道预测时间时,说明本车辆可能会与第一前方车辆碰撞,必须需同时根据第一碰撞时间和第二碰撞时间与第一设定阈值的大小来判断是否进行警示和制动提醒,本发明额外考虑了第二碰撞时间和变道预测时间对本车辆碰撞风险的影响,提高了驾驶安全性。
附图说明
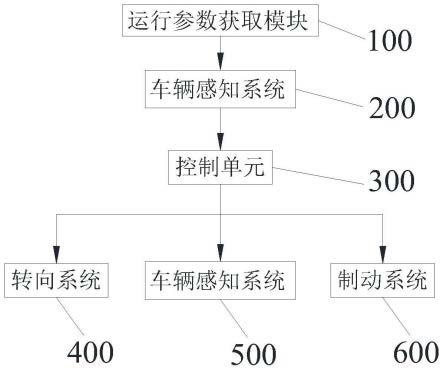
29.图1为本发明自动紧急避让系统结构示意图。
30.图2为本发明控制方法的流程示意图。
31.图中各部件标号如下:运行参数获取模块100、车辆感知系统200、控制单元300、语音提示模块400、转向系统500、制动系统600。
具体实施方式
32.下面具体实施方式用于对本发明的权利要求技术方案作进一步的详细说明,便于本领域的技术人员更清楚地了解本权利要求书。本发明的保护范围不限于下面具体的实施例。本领域的技术人员做出的包含有本发明权利要求书技术方案而不同于下列具体实施方式的也是本发明的保护范围。
33.如图1所示,一种基于前车运行状态的自动紧急避让系统,包括运行参数获取模块100、车辆感知系统200、控制单元300、语音提示模块400。
34.运行参数获取模块100用于获取本车辆的运行参数,包括本车辆位置、车速、转向角度、制动踏板开度。
35.语音提示模块400用于收到控制单元300的指令后进行语音警示和制动提醒,提醒
驾驶员进行制动操作。
36.车辆感知系统200用于在识别距离内识别前方同车道内存在第一前方车辆和第二前方车辆时,采集第一前方车辆和第二前方车辆的运行参数,包括前方车辆的位置、车速、横向位移和横向速度;并获取本车辆与第一前方车辆的第一碰撞时间、本车辆与第二前方车辆的第二碰撞时间、第一前方车辆的变道预测时间;第一前方车辆为与本车辆距离最近的前方车辆,第二前方车辆为与本车辆距离第二近的前方车辆。
37.控制单元300用于判断当第一碰撞时间小于或等于变道预测时间时,若第一碰撞时间或第二碰撞时间小于第一设定阈值,控制语音提示模块400进行警示和制动提醒,若第一碰撞时间和第二碰撞时间均大于第一设定阈值,则不进行任何控制。
38.控制单元300还用于判断当第一碰撞时间大于变道预测时间时,若第二碰撞时间小于或等于第一设定阈值时,控制语音提示模块400进行警示和制动提醒,若第一碰撞时间大于第一设定阈值,则不进行任何控制。
39.车辆感知系统200还用于在识别距离内识别前方同车道内仅存在前方第一车辆时,采集前方第一车辆的运行参数,包括第一前方车辆的位置、车速、横向位移和横向速度,获取本车辆与第一前方车辆的第一碰撞时间、第一前方车辆的横向速度和横向位移;控制单元300用于判断当第一前方车辆的横向速度大于设定横向速度、或第一前方车辆的横向位移大于设定横向位移时,若第一碰撞时间小于第二设定阈值,控制语音提示模块400进行警示和制动提醒,第二设定阈值大于第一设定阈值。
40.车辆感知系统200还用于在识别距离内识别前方同车道内仅存在前方第一车辆时,控制单元300用于判断当第一前方车辆的横向速度小于或等于设定横向速度、且第一前方车辆的横向位移小于或等于设定横向位移时,若第一碰撞时间小于第一设定阈值,控制语音提示模块400进行警示和制动提醒。
41.车辆感知系统200还用于获取第一前方车辆当前时刻的横向位置到横向变道完成时的横向距离,获取横向距离与第一前方车辆横向速度的除数作为第一前方车辆的变道预测时间。
42.控制单元300用于判断:当语音提示模块400进行警示和制动提醒后,若第一碰撞时间或第二碰撞时间小于或等于第三设定阈值时,第三设定阈值小于第一设定阈值,控制本车辆进入自动紧急避让模式。
43.在自动紧急避让模式中,车辆感知系统200还用于获取相邻车道的车况和路况,得到本车辆变道后与相邻车道最近前方车辆的第三碰撞时间、与相邻车道最近后方车辆的第四碰撞时间和道路曲率,控制单元300用于判断当第三碰撞时间大于第一设定阈值、且第四碰撞时间大于第一设定阈值、且道路曲率小于或等于设定曲率时,控制转向系统500进行自动转向变道。
44.在自动紧急避让模式中,控制单元300还用于判断当第三碰撞时间小于或等于第一设定阈值、或第四碰撞时间小于或等于第一设定阈值、或道路曲率大于设定曲率时,控制制动系统600进行自动紧急制动。
45.如图2所示,上述基于前车运行状态的自动紧急避让系统的控制方法如下:
46.第一实施例:当车辆感知系统200在识别距离之内识别到前方同车道内存在第一前方车辆和第二前方车辆时,采集本车辆、第一前方车辆和第二前方车辆的运行参数,第一
前方车辆为与本车辆距离最近的前方车辆,第二前方车辆为与本车辆距离第二近的前方车辆;
47.车辆感知系统200得到本车辆与第一前方车辆的第一碰撞时间tc1、本车辆与第二前方车辆的第二碰撞时间tc2、第一前方车辆的变道预测时间tb;第一前方车辆的变道预测时间tb的确定方法为,获取第一前方车辆当前时刻的横向位置到横向变道完成时的横向距离,获取横向距离与第一前方车辆横向速度的除数。
48.控制单元300判断当第一碰撞时间tc1小于或等于变道预测时间tb时,若第一碰撞时间tc1或第二碰撞时间tc2小于第一设定阈值ts1,语音提示模块400进行警示和制动提醒,若第一碰撞时间tc1和第二碰撞时间tc2均大于第一设定阈值ts1,则不进行任何控制。
49.控制单元300判断当第一碰撞时间tc1大于变道预测时间tb时,若第二碰撞时间tc2小于或等于第一设定阈值ts1时,语音提示模块400进行警示和制动提醒,若第一碰撞时间tc1大于第一设定阈值ts1,则不进行任何控制。
50.当第一碰撞时间大于变道预测时间时,说明第一前方车辆在与本车辆碰撞前就完成了变道,本车辆只可能与第二前方车辆发何时能碰撞,仅需根据第二碰撞时间与第一设定阈值的大小来判断是否进行警示和制动提醒;当第一碰撞时间小于或等于变道预测时间时,说明本车辆可能会与第一前方车辆碰撞,必须需同时根据第一碰撞时间和第二碰撞时间与第一设定阈值的大小来判断是否进行警示和制动提醒,本发明额外考虑了第二碰撞时间和变道预测时间对本车辆碰撞风险的影响,提高了驾驶安全性。
51.第二实施例:当车辆感知系统200在识别距离内识别前方同车道内仅存在前方第一车辆,采集本车辆与前方第一车辆的运行参数,本车辆与第一前方车辆的第一碰撞时间tc1、第一前方车辆的横向速度vy和横向位移sy,第一前方车辆的横向位移sy是指上个采样时间点到当前采样时间点内的横向位移,横向速度vy是指当前采样时间点的瞬时速度。
52.控制单元300判断当第一前方车辆的横向速度vy大于设定横向速度vys、或第一前方车辆的横向位移sy大于设定横向位移sys时,若第一碰撞时间tc1小于第二设定阈值ts2,第二设定阈值ts2大于第一设定阈值ts1,语音提示模块400进行警示和制动提醒。此时,认为第一前方车辆有横向变道的趋势和可能性,由于第一前方车辆的遮挡导致本车辆驾驶员不清楚第一前方车辆前方的车况,第一前方车辆可能会因为第二前方车辆发生突然停车或者紧急制动而进行变道操作,为了预防第一前方车辆变道完成之后本车辆与前方第二车辆的第二碰撞时间很短来不及做出避让反应,在第一前方车辆进行变道操作的过程中便提前进行预判,并且第二设定阈值要大于第一设定阈值,这样一旦第一前方车辆真的变道本车辆预留更多的反应时间,提高了驾驶安全性。
53.控制单元300判断当第一前方车辆的横向速度vy小于或等于设定横向速度vys、且第一前方车辆的横向位移sy小于或等于设定横向位移sys时,若第一碰撞时间tc1小于第一设定阈值ts1,语音提示模块400进行警示和制动提醒。此时,认为第一前方车辆没有横向变道的趋势和可能性,因此只需要比较第一碰撞时间与第一设定阈值的大小即可判断本车辆的碰撞风险。
54.在上述第一实施例和第二实施例中,当进行制动提醒时,制动系统提前建压,使制动液填充制动管路,缩短驾驶员踩踏制动踏板后到制动系统执行制动动作的时间,进一步地缩短了反应时间。当语音提示模块400进行警示和制动提醒后,控制单元300判断若第一
碰撞时间tc1或第二碰撞时间tc2小于或等于第三设定阈值ts3时,第三设定阈值ts3小于第一设定阈值ts1,本车辆进入自动紧急避让模式。此时说明驾驶员在语音提示后没有进行制动操作或者制动踏板开度较小使得减速度不足,导致第一碰撞时间和第二碰撞时间继续变小直到小于第三设定阈值,碰撞风险增大,如果不强制进行避让操作发生碰撞风险较大,因此需要系统自动进行紧急避让操作。
55.在自动紧急避让模式中,还获取相邻车道的车况和路况,得到本车辆变道后与相邻车道最近前方车辆的第三碰撞时间tc3、与相邻车道最近后方车辆的第四碰撞时间tc4和道路曲率ρ,当第三碰撞时间tc3大于第一设定阈值ts1、且第四碰撞时间tc4大于第一设定阈值ts1、且道路曲率ρ小于或等于设定曲率ρs时,本车辆进行自动转向变更。此时说明相邻车道的车况满足本车辆的变道后的安全要求,且道路曲率较小适合变道操作,优先进行变道操作。
56.在自动紧急避让模式中,当第三碰撞时间tc3小于或等于第一设定阈值、或第四碰撞时间tc4小于或等于第一设定阈值ts1、或道路曲率ρ大于设定曲率ρs时,本车辆进行自动紧急制动。此时说明相邻车道的车况不满足本车辆的变道后的安全要求,或者道路曲率较大不适合变道操作,优先进行制动操作来避免碰撞,待满足变道条件后再进行变道操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1