一种电客车载轨道智能巡检系统及方法与流程
1.本发明属于轨道巡检技术领域,具体来说是一种电客车载轨道智能巡检系统及方法。
背景技术:
2.目前迄今为止,我国地铁以及铁路部门还主要依靠人工巡检的方法检测轨道伤损。日常巡检人工肉眼观察、重点路段检查、经验检测为主。铁路工人按月、季、年定时巡检。巡检过程一般以工人的个人经验为主,辅助一些简单仪器,工人在巡检过程中发现问题后记录并上报维护部门。这种现行的人工巡检效率低、检测精度低、安全隐患大。而从国外引进或我国一些科研机构自主研发的大型巡检车系统虽然效率高,检测速度可达60km/h~80km/h,但作业计划性强,调度困难,灵活性差,对轨道病害的确认不及时,拖延了故障的及时处理。
3.地铁白天基本处于运营时间,而维修的时间只能放在夜间进行,维修的纯作业时间少,而检测的项目多,检测的范围大、距离长。现有的以人工巡道检查的检测方式已经不能满足检测要求,检测效率的提高势在必行。机器视觉技术作为一种非接触式、自动化检测的有效方法,已经更多的用于铁路的安全检测。地铁电客车白天处于运营状态,在运营的同时如果能做到对全线路巡道检查将会大大节省人力物力,节约时间,提高工作效率。所以利用电客车在工作的同时完成无人值守或远程操控的巡检将会成为轨道交通巡检趋势。
4.电客车载轨道智能巡检系统,通过拍摄轨道和钢轨表面,对钢轨缺陷、扣件缺陷、轨道板缺陷以及轨道异物等自动识别,并通过5g网络将数据传至数据中心,完成整条线路的巡检工作,并统计缺陷及异物实时上报发送至客户端,必将可以大大提高检测工作效率。
技术实现要素:
5.1.发明要解决的技术问题
6.本发明的目的在于解决现有的轨道巡检效率低的问题。
7.2.技术方案
8.为达到上述目的,本发明提供的技术方案为:
9.本发明的一种电客车载轨道智能巡检系统,包括用于检测钢轨的检测系统,所述检测系统包括子巡检系统一、子巡检系统二和子巡检系统三,所述子巡检系统一包括轨面巡检模块一、轨道巡检模块一和轨面三维检测模块一,所述子巡检系统二包括轨面巡检模块二、轨道巡检模块二和轨面三维检测模块二,所述子巡检系统三包括轨面巡检模块三,所述子巡检系统一和子巡检系统二分别设置于左右股轨道的正上方,所述子巡检系统三设置于左右股轨道的中心线上。
10.优选的,所述子巡检系统三还包括里程电子标签读写模块和无线传输模块,所述无线传输模块分别与里程电子标签读写模块、轨面巡检模块三、子巡检系统一和子巡检系统二通讯连接并发送数据至云端。
11.优选的,还包括控制模块,所述控制模块包括设置于集成机箱内的数据采集单元、信号处理单元和电源控制单元,所述信号处理单元与所述无线传输模块通讯连接,所述数据采集单元与所述信号处理单元电连接,所述电源控制单元分别与数据采集单元、信号处理单元电连接。
12.优选的,所述轨面巡检模块一、轨面巡检模块二和轨面巡检模块三具体包括相机和补光光源;所述轨道巡检模块一和轨道巡检模块二具体包括相机和补光光源;所述轨面三维检测模块一和轨面三维检测模块二具体为包括相机和激光光源。
13.优选的,所述数据采集单元具体为数据处理工作站,所述信号处理单元具体为无线信号传输组件;所述控制模块设置于轨道交通电客车车厢座位底部。
14.优选的,所述子巡检系统一、子巡检系统二和子巡检系统三均固定连接于固定件,所述固定件与车厢下端固定连接,所述固定件设有走行轮与轨道滚动连接,所述走行轮接触设置有编码器,所述编码器与子巡检系统一、子巡检系统二和子巡检系统三的相机触发线连接。
15.一种电客车载轨道智能巡检方法,采用上述的智能巡检系统,所述方法为
16.通过子巡检系统一和子巡检系统二对左右股轨道进行测量得到测量数据一和测量数据二,通过子巡检系统三对轨枕进行测量得到测量数据三,所述测量数据一、测量数据二和测量数据三均与编码器数据、里程电子标签数据相匹配,对测量数据一、测量数据二、测量数据三、编码器数据和里程电子标签数据同步分析得到对应里程断面详细的实际轨道图像数据,对实际轨道图像数据分析得到轨道磨损缺陷数据。
17.优选的,对测量数据一、测量数据二、测量数据三和里程电子标签数据同步分析具体为将测量数据一、测量数据二、测量数据三中的图像数据与参考数据进行对比判断图像数据是否有掉块,并通过测量数据三中的三维数据分析掉块的三维尺寸。
18.优选的,对实际轨道图像数据分析得到轨道磨损缺陷数据为通过采集大量的有缺陷的图像样本利用深度学习方法进行模型训练,让每一种缺陷类型能够达到自学习自适应效果,利用训练的模型进行检测实际采集的轨道图像数据样本,进行样本库的匹配,判断其是否为缺陷。
19.优选的,所述编码器数据还包括车辆走行里程和定位数据,所述编码器数据与里程电子标签数据匹配进行里程的快速矫正与定位,具体为:
20.编码器记录车辆走行的第一里程k1、射频系统主要接收线路电子标签为第二里程k2;第一里程k1为初始理想走行里程,第二里程k2为线路实际真实里程;当里程增加时:k1=k0+(p1
‑
po)*(π*d)/t,当里程减少时:k1=k0
‑
(p1
‑
po)*[(π*d)/t],
[0021]
k0为起始里程,p1为车轮走行的当前编码器计数的点数,p0为车轮走行时的编码器起始位置计数的点数,d为车轮直径,t为编码器精度,t=1024即车轮转一圈有1024个脉冲计数;
[0022]
k2则通过电子标签匹配里程数据库获得为里程真值。
[0023]
编码器走过的真实修正里程为:
[0024]
[0025]
其中,里程修正系数d=(k2
‑
k0)/(k1
‑
k0)。
[0026]
3.有益效果
[0027]
采用本发明提供的技术方案,与现有技术相比,具有如下有益效果:
[0028]
本发明的一种电客车载轨道智能巡检系统及方法,通过子巡检系统一和子巡检系统二对左右股轨道进行测量得到测量数据一和测量数据二,通过子巡检系统三对轨枕进行测量得到测量数据三,所述测量数据一、测量数据二和测量数据三均与编码器数据、里程电子标签数据相匹配,对测量数据一、测量数据二、测量数据三、编码器数据和里程电子标签数据同步分析得到对应里程断面详细的实际轨道图像数据,对实际轨道图像数据分析得到轨道磨损缺陷数据,相对于传统的人工巡检,效率大大提高且准确度也有更好的保证。
附图说明
[0029]
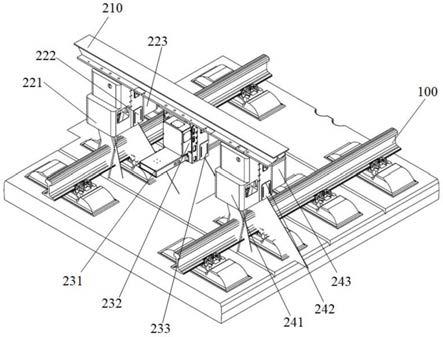
图1为本发明的一种电客车载轨道图像采集装置及智能巡检系统的结构示意图;
[0030]
图2为本实施例1的棋盘格标定板示意图。
[0031]
示意图中的标号说明:
[0032]
100、钢轨;200、检测系统;210、固定件;221、轨面巡检模块一;222、轨道巡检模块一;223、轨面三维检测模块一;231、里程电子标签读写模块;232、无线传输模块;233、轨面巡检模块三;241、轨面巡检模块二;242、轨道巡检模块二;243、轨面三维检测模块二。
具体实施方式
[0033]
为了便于理解本发明,下面将参照相关附图对本发明进行更全面的描述,附图中给出了本发明的若干实施例,但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施例,相反地,提供这些实施例的目的是使对本发明的公开内容更加透彻全面。
[0034]
需要说明的是,当元件被称为“固设于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件;当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件;本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
[0035]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同;本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明;本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
[0036]
实施例1
[0037]
参照附图1
‑
附图2,本实施例的一种电客车载轨道智能巡检系统,包括用于检测钢轨100的检测系统200,所述检测系统200包括子巡检系统一、子巡检系统二和子巡检系统三,所述子巡检系统一包括轨面巡检模块一221、轨道巡检模块一222和轨面三维检测模块一223,所述子巡检系统二包括轨面巡检模块二241、轨道巡检模块二242和轨面三维检测模块二243,所述子巡检系统三包括轨面巡检模块三233,所述子巡检系统一和子巡检系统二分别设置于左右股轨道的正上方,所述子巡检系统三设置于左右股轨道的中心线上。轨面巡检模块一和轨面巡检模块二用于拍摄轨道近景高精度图像来检查轨面的一些伤损包括:轨面裂纹、轨面擦伤或掉块、轨面鱼鳞纹、波磨、光带异常、焊缝等轨面伤损缺陷;轨道巡检
模块一和轨道巡检模块二主要拍摄整个轨道面包括轨道板、扣件、钢轨等来检查轨道异物、弹条松动、弹条缺失、螺栓缺失、弹条断裂、轨道板裂纹和掉块等缺陷;轨面三维检测模块一和轨面三维检测模块二主要采集轨面纵向点云数据,还原轨面三维深度信息,采用同一里程编码,利用图像数据还原整条线路的轨道面可视化信息。利用里程定位,可搜索出具体里程的轨道图像数据,包括此里程断面详细的轨道图像数据,当轨道图像数据有掉块时,可具体通过轨面三维检测系统模块定位到此掉块的深度信息,并给出详细的解决方案。可完成钢轨擦伤、掉块、焊缝、光带异常、弹条及螺栓缺失、弹条松动、轨道异物、轨道板裂纹等智能轨道病害在线实时判别检测,检出率不低于90%。同时实现轨面二维平面图像和三维立体数据相结合,完成轨面掉块深度及面积的测量。
[0038]
所述子巡检系统三还包括里程电子标签读写模块231和无线传输模块232,所述无线传输模块232分别与里程电子标签读写模块231、轨面巡检模块三233、子巡检系统一和子巡检系统二通讯连接并发送数据至云端。里程电子标签读写模块231用于接收线路电子标签信息,用于里程的同步矫正,与编码器里程配合使用,达到巡检系统的精确定位。当系统远程启动时未接收到电子标签信息此时以编码器里程为准,但编码器走行具有累计误差,当rfid接收到一个里程标签通过与数据库里里程标签匹配,实现里程的快速矫正与定位。
[0039]
还包括控制模块,所述控制模块包括设置于集成机箱内的数据采集单元、信号处理单元和电源控制单元,所述信号处理单元与所述无线传输模块232通讯连接,所述数据采集单元与所述信号处理单元电连接,所述电源控制单元分别与数据采集单元、信号处理单元电连接。所述轨面巡检模块一221、轨面巡检模块二241和轨面巡检模块三233具体包括相机和补光光源。电源控制单元包含一个ups不间断电源和各种稳压模块,主要用于对车内输出的电源进行稳压和变压输出,为系统所有设备提供电力。
[0040]
所述轨道巡检模块一222和轨道巡检模块二242具体包括相机和补光光源。
[0041]
所述轨面三维检测模块一223和轨面三维检测模块二243具体为包括相机和激光光源。
[0042]
所述数据采集单元具体为数据处理工作站,主要用于存储系统采集的图像和三维数据,并进行处理分析,输出检测结果。数据处理工作站还通讯连接有一台配有固定端口和ip的处理服务器和一台客户用的便携平板,便携平板电脑控制检测系统实施开始检测、暂停、结束检测以及关机命令,同时接收巡检系统反馈回来的实时结果数据。配有固定端口和ip的处理服务器主要接收巡检系统检测有缺陷问题的图片,以及检测报告,同时发送到客户的控制平板端所述信号处理单元具体为无线信号传输组件,主要用于接收和控制相机信号、里程电子标签信号、里程编码信号以及5g带宽无线信号。所述控制模块设置于轨道交通电客车车厢座位底部。
[0043]
所述子巡检系统一、子巡检系统二和子巡检系统三均固定连接于固定件210,所述固定件210与车厢下端固定连接,所述固定件210设有走行轮与轨道滚动连接,所述走行轮接触设置有编码器,所述编码器与子巡检系统一、子巡检系统二和子巡检系统三的相机触发线连接。
[0044]
本实施例的只能巡检系统在使用前需要进行准确率试验,具体为
[0045]
(1)图像分辨率:
[0046]
在试验线上选定扣件、轨面、轨道板区域分别放置标定板如图2所示,各1个,采集
扣件、光带、轨道板区域带标定板图像各1张,并分别取得标定板方格的像素值,分别计算得到扣件图像、轨面图像、轨道板图像的分辨率。长度方向上图像分辨率=所选标定板方格长度/所对应像素数,宽度方向上图像分辨率=所选标定板方格宽度/所对应像素数。
[0047]
2)弹条缺陷识别率:
[0048]
在试验标记区段采集的轨道结构图像库中识别弹条缺失及松动的检测数量,与该区段内的实际制造弹条缺陷数进行计算,弹条检出率=(试验标记区段采集图片中识别的弹条缺陷数量/试验标记区段实际弹条缺陷数量)
×
100%。
[0049]
3)钢轨表面异常识别率:
[0050]
将每次采集的试验标记区段图片文件经图像智能识别软件处理后得出钢轨表面异常图片,与该区段内的实际钢轨表面异常图像数量进行计算。钢轨表面异常识别率=(通过软件识别出钢轨表面异常数量/实际钢轨表面异常图片数量)
×
100%。
[0051]
4)螺栓缺陷识别率:
[0052]
在试验标记区段采集的轨道结构图像库中识别弹条缺失及松动的检测数量,与该区段内的实际制造螺栓缺陷数进行计算。扣件异常识别率=(通过软件识别出扣件异常数量/实际扣件异常图片数量)
×
100%。
[0053]
5)缺陷检出重复率:
[0054]
在人工设置缺陷的区段内,巡检系统多次往返拍摄该区段进行验证。
[0055]
每个缺陷检测重复性=(每个缺陷通过软件识别出的次数/检测次数)
×
100%。
[0056]
缺陷检测重复性=所有“每个缺陷检测重复性”的平均数。
[0057]
实施例2
[0058]
本实施例的一种电客车载轨道智能巡检方法,采用上述实施例1所述的智能巡检系统,所述方法为
[0059]
通过子巡检系统一和子巡检系统二对左右股轨道进行测量得到测量数据一和测量数据二,通过子巡检系统三对轨枕进行测量得到测量数据三,所述测量数据一、测量数据二和测量数据三均与编码器数据、里程电子标签数据相匹配,对测量数据一、测量数据二、测量数据三、编码器数据和里程电子标签数据同步分析得到对应里程断面详细的实际轨道图像数据,对实际轨道图像数据分析得到轨道磨损缺陷数据。
[0060]
其中,测量数据一具体为轨面巡检模块一221拍摄的轨面图像数据、轨道巡检模块一222拍摄的轨道图像数据和和轨面三维检测模块一223拍摄的轨面纵向点云数据,还原轨面三维深度信息;测量数据二具体为轨面巡检模块二241拍摄的轨面图像数据、轨道巡检模块二242拍摄的轨道图像数据和轨面三维检测模块二243拍摄的轨面纵向点云数据,还原轨面三维深度信息;所述测量数据三为轨面巡检模块三233拍摄的轨枕图像数据,用于分析轨枕是否有异物或者损伤。
[0061]
对测量数据一、测量数据二、测量数据三和里程电子标签数据同步分析具体为将测量数据一、测量数据二、测量数据三中的图像数据与参考数据进行对比判断图像数据是否有掉块,并通过测量数据三中的三维数据分析掉块的三维尺寸。
[0062]
所述对实际轨道图像数据分析得到轨道磨损缺陷数据为通过采集大量的有缺陷的图像样本利用深度学习方法进行模型训练,让每一种缺陷类型能够达到自学习自适应效果,利用训练的模型进行检测实际采集的轨道图像数据样本,进行样本库的匹配,判断其是
否为缺陷。
[0063]
所述编码器数据还包括车辆走行里程和定位数据,所述编码器数据与里程电子标签数据匹配进行里程的快速矫正与定位,具体为:
[0064]
编码器记录车辆走行的第一里程k1、射频系统主要接收线路电子标签为第二里程k2;第一里程k1为初始理想走行里程,第二里程k2为线路实际真实里程;当里程增加时:k1=k0+(p1
‑
po)*(π*d)/t,当里程减少时:k1=k0
‑
(p1
‑
po)*[(π*d)/t],
[0065]
k0为起始里程,p1为车轮走行的当前编码器计数的点数,p0为车轮走行时的编码器起始位置计数的点数,d为车轮直径,t为编码器精度,t=1024即车轮转一圈有1024个脉冲计数;
[0066]
k2则通过电子标签匹配里程数据库获得为里程真值。
[0067]
编码器走过的真实修正里程为:
[0068][0069]
其中,里程修正系数d=(k2
‑
k0)/(k1
‑
k0)。
[0070]
以上所述实施例仅表达了本发明的某种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制;应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围;因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1