一种独轮城市空中巴士及控制方法与流程
:
1.本发明涉及一种独轮城市空中巴士及控制方法。
背景技术:
2.现有的立体车库的小车行走时,小车车轮与轨道摩擦产生的噪音很大。所以,小区居民不允许把立体车库建在小区居民楼旁。
3.贵州省引进德国西门子的悬挂式城市轨道交通设施,由
‘7’
字形水支撑架、、窄口水泥槽、空中列车、空中站台、楼梯和变压器组成,
‘7’
字形水支撑架的下端打桩插入公路外侧的土里,
‘7’
字形水支撑架的横梁指向公路,
‘7’
字形水支撑架的横梁的下面固定有窄口水泥槽,窄口水泥槽串联在一起,窄口水泥槽内有两根轨道。列车顶部的两对车轮压在窄口水泥槽内有两根轨道上。这种悬挂式城市轨道交通设施由大型水泥预制件吊装而成,建设期短,成本低;但噪音大,启步加速慢和行驶速度慢。由于是双车轮转弯半径较大,不适合城市道路转弯半径较小路况。
4.过去的蒸气机车牵引的客车车厢都是用木板做的,铁轨每隔12.5米有一个接头,火车行驶会产生周期性的振动;但由于客车车厢都是用木板做的,所以不会产生共振,客车车厢的噪音并不大。公交汽车的底盘是由钢材制成,公交汽车的地板和外壳是由钢板制成,遇到颠簸的公路会产生共振,公交汽车的车厢的噪音特别大。
5.发明专利申请号:201911097678.5名称《利用橡胶车轮降低城市空中轨道列车产生噪音的方法》使用
‘
钩’形轨道,列车使用橡胶车轮;这种列车虽然噪音小,但无法转弯和过岔道。
技术实现要素:
6.一种独轮城市空中巴士:主要由反写的
‘7’
字形水支撑架、正写的
‘7’
字形水支撑架、窄口水泥槽、空中巴士、空中站台、楼梯和变压器组成。反写的
‘7’
字形水支撑架和正写的
‘7’
字形水支撑架的下端打桩插入公路外侧的土里,反写的
‘7’
字形水支撑架和正写的
‘7’
字形水支撑架的横梁指向公路,反写的
‘7’
字形水支撑架的横梁的下面固定有窄口水泥槽,正写的
‘7’
字形水支撑架的横梁的下面固定有窄口水泥槽,窄口泥槽串联在一起。窄口水泥槽1内有两条车轮轨道,窄口水泥槽顶有两根导电轨道,通过碳刷把电传递给车头。始发站有
‘
y’字形岔道,变压器装在空中站台下面,空中巴士由车头、两节中间车厢和车尾组成,车头与中间车厢之间、两节中间车厢之间、中间车厢与车尾之间通过圆盘活动连接,车头、中间车厢和车尾两侧各有一个上车门和一个下车门,车头和车尾各有一个人工驾驶操纵盘。车轮表面有一层碳素纤维铝合金,车轮侧边凸起与车轮轨道相适配。车头顶部前段上方的窄口水泥槽内有一个车前长方形框架,车头前长方形框架前端中央位置装有一条竖直机腿,这一条竖直机腿下端固定在车头顶部前段,车头前长方形框架后端中央位置装有一条竖直机腿,这一条竖直机腿下端固定在车头顶部前段,车头的一个活动轨道车轮通过两个轴承装在车头前轴上,车头前轴两端固定在车头前长方形框架上。车头顶部后段上方的
窄口水泥槽内有一个车头后长方形框架,车头后长方形框架前端中央位置装有一条竖直机腿,这一条竖直机腿下端固定在车头顶部后段,车头后长方形框架后端中央位置装有一条竖直机腿,这一条竖直机腿下端固定在车头顶部后段,车头的一个动力轨道车轮通过两个轴承装在车头后轴上,车头后轴两端固定在车头后长方形框架上。动力轨道车轮为外转子永磁同步电机,车头后轴为外转子永磁同步电机轴。中间车厢顶部前段上方的窄口水泥槽内有一个中间车厢前长方形框架,中间车厢前长方形框架前端中央位置装有一条竖直机腿,这一条竖直机腿下端固定在中间车厢顶部前段,中间车厢前长方形框架后端中央位置装有一条竖直机腿,这一条竖直机腿4下端固定在中间车厢顶部前段,中间车厢的一个活动轨道车轮通过两个轴承装在中间车厢前轴上,中间车厢前轴两端固定在中间车厢前长方形框架上。中间车厢顶部后段上方的窄口水泥槽内有一个中间车厢后长方形框架,中间车厢后长方形框架前端中央位置装有一条竖直机腿,这一条竖直机腿下端固定在中间车厢顶部后段,中间车厢后长方形框架后端中央位置装有一条竖直机腿,这一条竖直机腿下端固定在中间车厢顶部后段,中间车厢的另一个活动轨道车轮通过两个轴承装在中间车厢后轴上,中间车厢后轴两端固定在后长方形框架上。车尾的结构与车头的结构是镜像对称的。活动轨道车轮和动力轨道车轮两侧凸起卡在车轮轨道外侧。窄口水泥槽顶装有颜色标示牌,红色代表停车,其他颜色代表不同的车速,车头前长方形框架上装有摄像头和探照灯,摄像头和探照灯对准窄口水泥槽顶装有的颜色标示牌。
7.一种独轮城市空中巴士的控制方法:在始发站人们通过步梯或者电梯到达空中站台,再从打开的空中巴士车门进入空中巴士,然后关上空中巴士车门。在始发站的
‘
y’字形岔道上,电脑控制仪电源接出的车头电源通过无人驾驶控制系统的超级电容给车头顶部后段上方的动力轨道车轮3外转子永磁同步电机供电,车头的动力轨道车轮3转动带动空中巴士前进。空中巴士的车头进入钢板制成的接头,车头沿着车轮轨道向右转,然后依次是第一节中间车厢沿着车轮轨道向右转、第二节中间车厢沿着车轮轨道向右转、车尾沿着车轮轨道向右转;在行驶过程中遇到右转弯,空中巴士车头沿着车轮轨道向右转,然后依次是第一节中间车厢沿着车轮轨道向右转、第二节中间车厢沿着车轮轨道向右转、车尾沿着车轮轨道向右转。在行驶过程中遇到左转弯,空中巴士车头沿着车轮轨道向左转,然后依次是第一节中间车厢沿着车轮轨道向左转、第二节中间车厢沿着车轮轨道向左转、车尾沿着车轮轨道向左转。车头前长方形框架上装有的探照灯照亮窄口水泥槽顶装有的颜色标示牌,车头前长方形框架上装有的摄像头扫描窄口水泥槽顶装有的颜色标示牌,无人驾驶系统根据标示牌的颜色来决定空中巴士加速、减速还是停车。在第一个空中站台,人们通过步梯或者电梯到达第一个空中站台,第一个空中站台的闸口是关闭的,防止人从第一个空中站台上掉下去。空中巴士在靠近第一个空中站台时车头实行再生制动将发出的电能反送到导电轨道上,到达空中站台一个空中站台时车头通过电磁制动准确地停靠在第一个空中站台,空中巴士的车门打开,第一个空中站台的闸口打开,空中站台上的人从车头、中间车厢和车尾的左侧前门上车,车头、中间车厢和车尾从车头、中间车厢和车尾的左侧后门下车。上下车完毕后,关闭车头、中间车厢和车尾左侧的前门和后门,关闭第一个空中站台的闸口。通过无人驾驶控制系统重新给车头顶部后段装有的车头的动力轨道车轮外转子永磁同步电机供电,从而使车头的动力轨道车轮转动带动空中巴士前进。如果空中巴士的车头出故障,无人驾驶系统会使用车尾的电源给车尾顶部前段装外转子有的永磁同步电机供电。如果空中巴
士的车头和车尾同时出故障,则需要用后面的空中巴士推着前面的车头和车尾同时出故障的空中巴士前进到达终点站。空中巴士靠近终点站的岔道时,电脑控制仪让给终点站自动扳道岔,空中巴士的车头沿着轨道向左转进入钢板制成的接头,然后依次是第一节中间车厢沿着轨道向左转、第二节中间车厢沿着轨道向左转、车尾沿着轨道向左转入窄口水泥槽。车头实行再生制动将发出的电能反送到导电轨道上,到达终点站时车头通过电磁制动准确地停靠在终点站。电脑控制仪将终点站控制站台的闸口打开,无人驾驶系统把空中巴士的车头、中间车厢和车尾左侧后门打开,下车的人从空中巴士的车头、中间车厢和车尾左侧后门下车。无人驾驶系统把空中巴士的车头、中间车厢和车尾右侧前门打开,上车的人从空中巴士的车头、中间车厢和车尾右侧前门上车。关上该空中巴士车门后,该空中巴士的车头变成车尾、车尾变成车头,该空中巴士将终点站转变成始发站,将钢板制成的接头的左边变成右边;将钢板制成的接头的右边变成左边。
8.一种独轮城市空中巴士:主要由反写的
‘7’
字形水支撑架、正写的
‘7’
字形水支撑架、窄口水泥槽1、空中巴士、空中站台、楼梯和变压器组成,反写的
‘7’
字形水支撑架和正写的
‘7’
字形水支撑架的下端打桩插入公路外侧的土里,反写的
‘7’
字形水支撑架和正写的
‘7’
字形水支撑架的横梁指向公路,反写的
‘7’
字形水支撑架的横梁的下面固定有窄口水泥槽,正写的
‘7’
字形水支撑架的横梁的下面固定有窄口水泥槽,窄口水泥槽串联在一起,窄口水泥槽顶有两根导电轨道,通过碳刷把电传递给车头。始发站有
‘
y’字形岔道,变压器装在空中站台下面,空中巴士由车头、两节中间车厢和车尾组成,车头与中间车厢之间、两节中间车厢之间、中间车厢与车尾之间通过圆盘活动连接,车头、中间车厢和车尾两侧各有一个上车门和一个下车门,车头和车尾各有一个人工驾驶操纵盘;车轮表面有一层橡胶。车头顶部前段上方的窄口水泥槽内有一个车头前长方形框架,车头前长方形框架前端中央位置装有两条竖直机腿,这两条竖直机腿下端固定在车头顶部前段,车头前长方形框架后端中央位置装有两条竖直机腿,这两条竖直机腿下端固定在车头顶部前段,车头的一个活动橡胶车轮通过两个轴承装在车头前轴上,车头前轴两端固定在车头前长方形框架上。车头顶部后段上方的窄口水泥槽内有一个车头后长方形框架,车头后长方形框架前端中央位置装有两条竖直机腿,这两条竖直机腿下端固定在车头顶部后段,车头后长方形框架后端中央位置装有两条竖直机腿,这两条竖直机腿下端固定在车头顶部后段,车头的一个动力橡胶车轮通过两个轴承装在车头后轴上,车头后轴两端固定在车头后长方形框架上。动力橡胶车轮为外转子永磁同步电机,车头后轴为外转子永磁同步电机轴。中间车厢顶部前段上方的窄口水泥槽内有一个中间车厢前长方形框架,中间车厢前长方形框架前端中央位置装有两条竖直机腿,这两条竖直机腿下端固定在中间车厢顶部前段,中间车厢前长方形框架后端中央位置装有两条竖直机腿,这两条竖直机腿下端固定在中间车厢顶部前段,中间车厢的一个活动橡胶车轮通过两个轴承装在中间车厢前轴上,中间车厢前轴两端固定在中间车厢前长方形框架上。中间车厢顶部后段上方的窄口水泥槽内有一个中间车厢后长方形框架,中间车厢后长方形框架前端中央位置装有两条竖直机腿,这两条竖直机腿下端固定在中间车厢顶部后段,中间车厢后长方形框架后端中央位置装有两条竖直机腿,这两条竖直机腿下端固定在中间车厢顶部后段,中间车厢的另一个活动橡胶车轮通过两个轴承装在中间车厢后轴上,中间车厢后轴两端固定在中间车厢后长方形框架上。车尾的结构与车头的结构是镜像对称的。竖直机腿为中心有装电线的孔圆管,钢管通过上轴承和下轴承固定在
圆管上,钢管上面敷设一层碳素纤维铝合金后成为后导向轮;窄口水泥槽1的窄口处两侧各镶嵌一根钢条,两根钢条与两根导向轮相适配。窄口水泥槽顶装有颜色标示牌,红色代表停车,其他颜色代表不同的车速,车头前长方形框架上装有摄像头和探照灯,摄像头和探照灯对准窄口水泥槽顶装有的颜色标示牌。
9.一种独轮城市空中巴士的控制方法:在始发站人们通过步梯或者电梯到达空中站台,再从打开的空中巴士车门进入空中巴士,然后关上空中巴士车门。在始发站的
‘
y’字形岔道上,电脑控制仪使始发站自动扳道岔,车头电源通过无人驾驶控制系统的超级电容给车头顶部后段装有的动力橡胶车轮外转子永磁同步电机供电,从而使车头的动力橡胶车轮3’转动带动空中巴士前进。空中巴士的车头进入钢板制成的接头,车头顶部左边的导向轮压在钢板制成的接头窄口左侧钢条上推着车头向右转,然后依次是车第一节中间车厢左边的导向轮、第二节中间车厢左边的导向轮、车尾左边的导向轮压在钢板制成的接头窄口左侧钢条上推着这些部位向右转。在行驶过程中遇到右转弯,空中巴士车头顶部的左边的导向轮压在窄口水泥槽1窄口左侧钢条上推着车头向右转,然后依次是第一节中间车厢左边的导向轮、第二节中间车厢左边的导向轮、车尾左边的导向轮压在窄口水泥槽窄口左侧钢条上推着这些部位向右转。在行驶过程中遇到左转弯,空中巴士车头顶部的右边的前向轮压在窄口水泥槽窄口右侧钢条上推着车头向左转,然后依次是第一节中间车厢右边的导向轮、第二节中间车厢右边的导向轮、车尾右边的导向轮压在窄口水泥槽窄口右侧钢条上推着这些部位向左转。车头前前长方形框架上装有的探照灯照亮窄口水泥槽顶装有的颜色标示牌,车头前长方形框架上装有的摄像头扫描窄口水泥槽1顶装有的颜色标示牌,无人驾驶系统根据标示牌的颜色来决定空中巴士加速、减速还是停车。在第一个空中站台,人们通过步梯或者电梯到达第一个空中站台,第一个空中站台的闸口是关闭的,防止人从第一个空中站台上掉下去。空中巴士在靠近第一个空中站台时车头实行再生制动将发出的电能反送到导电轨道上,到达空中站台一个空中站台时车头通过电磁制动准确地停靠在第一个空中站台,空中巴士的车门打开,第一个空中站台的闸口打开,空中站台上的人从车头、中间车厢和车尾的左侧前门上车,车头、中间车厢和车尾从车头、中间车厢和车尾的左侧后门下车。上下车完毕后,关闭车头、中间车厢和车尾左侧的前门和后门,关闭第一个空中站台的闸口,通过无人驾驶控制系统重新给车头顶部后段装有的动力橡胶车轮外转子永磁同步电机供电,从而使车头的动力橡胶车轮转动带动空中巴士前进。如果空中巴士的车头出故障,无人驾驶系统会使用车尾的电源给车尾顶部前段装有的永磁同步电机供电;如果空中巴士的车头和车尾同时出故障,则需要用后面的空中巴士推着前面的车头和车尾同时出故障的空中巴士前进到达终点站。空中巴士靠近终点站的岔道时,电脑控制仪给终点站自动扳道岔,空中巴士的车头进入钢板制成的接头,车头顶部左边的导向轮压在钢板制成的接头窄口左侧钢条上推着车头向右转进入窄口水泥槽,然后依次是第一节中间车厢左边的导向轮、第二节中间车厢左边的导向轮、车尾左边的导向轮压在钢板制成的接头窄口左侧钢条上推着这些部位向右转进入窄口水泥槽。车头实行再生制动将发出的电能反送到导电轨道上,到达终点站时车头通过电磁制动准确地停靠在终点站。电脑控制仪将终点站控制站台的闸口打开,无人驾驶系统把空中巴士的车头、中间车厢和车尾左侧后门打开,下车的人从空中巴士的车头、中间车厢和车尾左侧后门下车。无人驾驶系统把空中巴士的车头、中间车厢和车尾右侧前门打开,上车的人从空中巴士的车头、中间车厢和车尾右侧前门上车。关上
该空中巴士车门后,该空中巴士的车头变成车尾、车尾变成车头,该空中巴士将终点站转变成始发站,将钢板制成的接头的左边变成右边;将钢板制成的接头的右边变成左边。
10.由于活动固定车轮和动力固定车轮都是表面有一层碳素纤维铝合金的车轮,与车轮轨道的摩擦力大、噪音低,所以提速很快。由于活动橡胶车轮和动力橡胶车轮都是橡胶车轮,所以空中巴士在直线线路上能够像电动巴士在直线公路上那样,在200米内10秒钟启动加速到每小时100公里,而且噪音低。传统的空中轨道列车启动和加速是非常缓慢的,空中轨道列车的时速不超过每小时80公里,如果两站间隔1公里,空中轨道列车只能加速到每小时501公里,而且空中轨道列车的噪音很大。由于空中巴士的机腿上装有导向轮,在不使用方向盘的情况下,空中巴士能够转动转弯。独轮城市巴士转弯半径较小,非常城市交通十字路口多转弯半径小的路况。动力车轮是外转子永磁同步电机,减少了齿轮传动造成的噪音,结构更加紧凑。
附图说明:
11.下面结合附图和具体实施方式对本发明做进一步具体详细的说明。
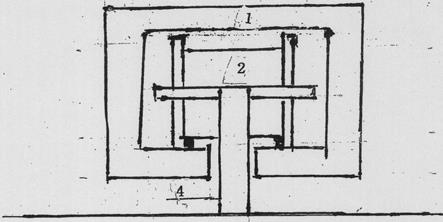
12.图1是本发明中车头活动轨道车轮与窄口水泥槽的主视图。
13.图2是本发明中车头活动轨道车轮与动力轨道车轮的左视图。
14.图3是本发明中车头活动橡胶车轮与窄口水泥槽的主视图。
15.图4是本发明中车头活动橡胶车轮与动力橡胶车轮的左视图。
具体实施方式:
16.图1和图2所示,一种独轮城市空中巴士:主要由反写的
‘7’
字形水支撑架、正写的
‘7’
字形水支撑架、窄口水泥槽1、空中巴士、空中站台、楼梯和变压器组成。反写的
‘7’
字形水支撑架和正写的
‘7’
字形水支撑架的下端打桩插入公路外侧的土里,反写的
‘7’
字形水支撑架和正写的
‘7’
字形水支撑架的横梁指向公路,反写的
‘7’
字形水支撑架的横梁的下面固定有窄口水泥槽1,正写的
‘7’
字形水支撑架的横梁的下面固定有窄口水泥槽1,窄口水泥槽1串联在一起。窄口水泥槽1内有两条车轮轨道,窄口水泥槽1顶有两根导电轨道,通过碳刷把电传递给车头。始发站有
‘
y’字形岔道,变压器装在空中站台下面,空中巴士由车头、两节中间车厢和车尾组成,车头与中间车厢之间、两节中间车厢之间、中间车厢与车尾之间通过圆盘活动连接,车头、中间车厢和车尾两侧各有一个上车门和一个下车门,车头和车尾各有一个人工驾驶操纵盘。车轮表面有一层碳素纤维铝合金,车轮侧边凸起与车轮轨道相适配。车头顶部前段上方的窄口水泥槽1内有一个车头前长方形框架,车头前长方形框架前端中央位置装有一条竖直机腿4,这一条竖直机腿4下端固定在车头顶部前段,车头前长方形框架后端中央位置装有一条竖直机腿4,这一条竖直机腿4下端固定在车头顶部前段,车头的一个活动轨道车轮2通过两个轴承装在车头前轴上,车头前轴两端固定在车头前长方形框架上。车头顶部后段上方的窄口水泥槽1内有一个车头后长方形框架,车头后长方形框架前端中央位置装有一条竖直机腿4,这一条竖直机腿4下端固定在车头顶部后段,车头后长方形框架后端中央位置装有一条竖直机腿4,这一条竖直机腿4下端固定在车头顶部后段,车头的一个动力轨道车轮3通过两个轴承装在车头后轴上,车头后轴两端固定在车头后长方形框架上。动力轨道车轮3为外转子永磁同步电机,车头后轴为外转子永磁同步电机轴。中
间车厢顶部前段上方的窄口水泥槽1内有一个中间车厢前长方形框架,中间车厢前长方形框架前端中央位置装有一条竖直机腿4,这一条竖直机腿4下端固定在中间车厢顶部前段,中间车厢前长方形框架后端中央位置装有一条竖直机腿4,这一条竖直机腿4下端固定在中间车厢顶部前段,中间车厢的一个活动轨道车轮2通过两个轴承装在中间车厢前轴上,中间车厢前轴两端固定在中间车厢前长方形框架上。中间车厢顶部后段上方的窄口水泥槽1内有一个中间车厢后长方形框架,中间车厢后长方形框架前端中央位置装有一条竖直机腿4,这一条竖直机腿4下端固定在中间车厢顶部后段,中间车厢后长方形框架后端中央位置装有一条竖直机腿4,这一条竖直机腿4下端固定在中间车厢顶部后段,中间车厢的另一个活动轨道车轮2通过两个轴承装在中间车厢后轴上,中间车厢后轴两端固定在后长方形框架上。车尾的结构与车头的结构是镜像对称的。活动轨道车轮2和动力轨道车轮3两侧凸起卡在车轮轨道外侧。窄口水泥槽1顶装有颜色标示牌,红色代表停车,其他颜色代表不同的车速,车头前长方形框架上装有摄像头和探照灯,摄像头和探照灯对准窄口水泥槽1顶装有的颜色标示牌。
17.图1和图2所示,一种独轮城市空中巴士的控制方法:在始发站人们通过步梯或者电梯到达空中站台,再从打开的空中巴士车门进入空中巴士,然后关上空中巴士车门。在始发站的
‘
y’字形岔道上,电脑控制仪电源接出的车头电源通过无人驾驶控制系统的超级电容给车头顶部后段上方的动力轨道车轮3外转子永磁同步电机供电,车头的动力轨道车轮3转动带动空中巴士前进。空中巴士的车头进入钢板制成的接头,车头沿着车轮轨道向右转,然后依次是第一节中间车厢沿着车轮轨道向右转、第二节中间车厢沿着车轮轨道向右转、车尾沿着车轮轨道向右转;在行驶过程中遇到右转弯,空中巴士车头沿着车轮轨道向右转,然后依次是第一节中间车厢沿着车轮轨道向右转、第二节中间车厢沿着车轮轨道向右转、车尾沿着车轮轨道向右转。在行驶过程中遇到左转弯,空中巴士车头沿着车轮轨道向左转,然后依次是第一节中间车厢沿着车轮轨道向左转、第二节中间车厢沿着车轮轨道向左转、车尾沿着车轮轨道向左转。车头前长方形框架上装有的探照灯照亮窄口水泥槽1顶装有的颜色标示牌,车头前长方形框架上装有的摄像头扫描窄口水泥槽1顶装有的颜色标示牌,无人驾驶系统根据标示牌的颜色来决定空中巴士加速、减速还是停车。在第一个空中站台,人们通过步梯或者电梯到达第一个空中站台,第一个空中站台的闸口是关闭的,防止人从第一个空中站台上掉下去。空中巴士在靠近第一个空中站台时车头实行再生制动将发出的电能反送到导电轨道上,到达空中站台一个空中站台时车头通过电磁制动准确地停靠在第一个空中站台,空中巴士的车门打开,第一个空中站台的闸口打开,空中站台上的人从车头、中间车厢和车尾的左侧前门上车,车头、中间车厢和车尾从车头、中间车厢和车尾的左侧后门下车。上下车完毕后,关闭车头、中间车厢和车尾左侧的前门和后门,关闭第一个空中站台的闸口。通过无人驾驶控制系统重新给车头顶部后段装有的车头的动力轨道车轮3外转子永磁同步电机供电,从而使车头的动力轨道车轮3转动带动空中巴士前进。如果空中巴士的车头出故障,无人驾驶系统会使用车尾的电源给车尾顶部前段装外转子有的永磁同步电机供电。如果空中巴士的车头和车尾同时出故障,则需要用后面的空中巴士推着前面的车头和车尾同时出故障的空中巴士前进到达终点站。空中巴士靠近终点站的岔道时,电脑控制仪让给终点站自动扳道岔,空中巴士的车头沿着轨道向左转进入钢板制成的接头,然后依次是第一节中间车厢沿着轨道向左转、第二节中间车厢沿着轨道向左转、车尾沿着轨道
向左转入窄口水泥槽1。车头实行再生制动将发出的电能反送到导电轨道上,到达终点站时车头通过电磁制动准确地停靠在终点站。电脑控制仪将终点站控制站台的闸口打开,无人驾驶系统把空中巴士的车头、中间车厢和车尾左侧后门打开,下车的人从空中巴士的车头、中间车厢和车尾左侧后门下车。无人驾驶系统把空中巴士的车头、中间车厢和车尾右侧前门打开,上车的人从空中巴士的车头、中间车厢和车尾右侧前门上车。关上该空中巴士车门后,该空中巴士的车头变成车尾、车尾变成车头,该空中巴士将终点站转变成始发站,将钢板制成的接头的左边变成右边;将钢板制成的接头的右边变成左边。
18.图3和图4所示,一种独轮城市空中巴士:主要由反写的
‘7’
字形水支撑架、正写的
‘7’
字形水支撑架、窄口水泥槽1、空中巴士、空中站台、楼梯和变压器组成,反写的
‘7’
字形水支撑架和正写的
‘7’
字形水支撑架的下端打桩插入公路外侧的土里,反写的
‘7’
字形水支撑架和正写的
‘7’
字形水支撑架的横梁指向公路,反写的
‘7’
字形水支撑架的横梁的下面固定有窄口水泥槽1,正写的
‘7’
字形水支撑架的横梁的下面固定有窄口水泥槽1,窄口水泥槽1串联在一起,窄口水泥槽1顶有两根导电轨道,通过碳刷把电传递给车头。始发站有
‘
y’字形岔道,变压器装在空中站台下面,空中巴士由车头、两节中间车厢和车尾组成,车头与中间车厢之间、两节中间车厢之间、中间车厢与车尾之间通过圆盘活动连接,车头、中间车厢和车尾两侧各有一个上车门和一个下车门,车头和车尾各有一个人工驾驶操纵盘;车轮表面有一层橡胶。车头顶部前段上方的窄口水泥槽1内有一个车头前长方形框架,车头前长方形框架前端中央位置装有两条竖直机腿4,这两条竖直机腿4下端固定在车头顶部前段,车头前长方形框架后端中央位置装有两条竖直机腿4,这两条竖直机腿4下端固定在车头顶部前段,车头的一个活动橡胶车轮2’通过两个轴承装在车头前轴上,车头前轴两端固定在车头前长方形框架上。车头顶部后段上方的窄口水泥槽1内有一个车头后长方形框架,车头后长方形框架前端中央位置装有两条竖直机腿4,这两条竖直机腿4下端固定在车头顶部后段,车头后长方形框架后端中央位置装有两条竖直机腿4,这两条竖直机腿4下端固定在车头顶部后段,车头的一个动力橡胶车轮3’通过两个轴承装在车头后轴上,车头后轴两端固定在车头后长方形框架上。动力橡胶车轮3’为外转子永磁同步电机,车头后轴为外转子永磁同步电机轴。中间车厢顶部前段上方的窄口水泥槽1内有一个中间车厢前长方形框架,中间车厢前长方形框架前端中央位置装有两条竖直机腿4,这两条竖直机腿4下端固定在中间车厢顶部前段,中间车厢前长方形框架后端中央位置装有两条竖直机腿4,这两条竖直机腿4下端固定在中间车厢顶部前段,中间车厢的一个活动橡胶车轮2’通过两个轴承装在中间车厢前轴上,中间车厢前轴两端固定在中间车厢前长方形框架上。中间车厢顶部后段上方的窄口水泥槽1内有一个中间车厢后长方形框架,中间车厢后长方形框架前端中央位置装有两条竖直机腿4,这两条竖直机腿4下端固定在中间车厢顶部后段,中间车厢后长方形框架后端中央位置装有两条竖直机腿4,这两条竖直机腿4下端固定在中间车厢顶部后段,中间车厢的另一个活动橡胶车轮2’通过两个轴承装在中间车厢后轴上,中间车厢后轴两端固定在中间车厢后长方形框架上。车尾的结构与车头的结构是镜像对称的。竖直机腿4为中心有装电线的孔圆管,钢管通过上轴承和下轴承固定在圆管上,钢管上面敷设一层碳素纤维铝合金后成为后导向轮;窄口水泥槽1的窄口处两侧各镶嵌一根钢条,两根钢条与两根导向轮相适配。窄口水泥槽1顶装有颜色标示牌,红色代表停车,其他颜色代表不同的车速,车头前长方形框架上装有摄像头和探照灯,摄像头和探照灯对准窄口水泥槽1顶装有的颜色标
示牌。
19.图3和图4所示,一种独轮城市空中巴士的控制方法:在始发站人们通过步梯或者电梯到达空中站台,再从打开的空中巴士车门进入空中巴士,然后关上空中巴士车门。在始发站的
‘
y’字形岔道上,电脑控制仪使始发站自动扳道岔,车头电源通过无人驾驶控制系统的超级电容给车头顶部后段装有的动力橡胶车轮3’外转子永磁同步电机供电,从而使车头的动力橡胶车轮3’转动带动空中巴士前进。空中巴士的车头进入钢板制成的接头,车头顶部左边的导向轮压在钢板制成的接头窄口左侧钢条上推着车头向右转,然后依次是车第一节中间车厢左边的导向轮、第二节中间车厢左边的导向轮、车尾左边的导向轮压在钢板制成的接头窄口左侧钢条上推着这些部位向右转。在行驶过程中遇到右转弯,空中巴士车头顶部的左边的导向轮压在窄口水泥槽1窄口左侧钢条上推着车头向右转,然后依次是第一节中间车厢左边的导向轮、第二节中间车厢左边的导向轮、车尾左边的导向轮压在窄口水泥槽1窄口左侧钢条上推着这些部位向右转。在行驶过程中遇到左转弯,空中巴士车头顶部的右边的前向轮压在窄口水泥槽1窄口右侧钢条上推着车头向左转,然后依次是第一节中间车厢右边的导向轮、第二节中间车厢右边的导向轮、车尾右边的导向轮压在窄口水泥槽1窄口右侧钢条上推着这些部位向左转。车头前前长方形框架上装有的探照灯照亮窄口水泥槽1顶装有的颜色标示牌,车头前长方形框架上装有的摄像头扫描窄口水泥槽1顶装有的颜色标示牌,无人驾驶系统根据标示牌的颜色来决定空中巴士加速、减速还是停车。在第一个空中站台,人们通过步梯或者电梯到达第一个空中站台,第一个空中站台的闸口是关闭的,防止人从第一个空中站台上掉下去。空中巴士在靠近第一个空中站台时车头实行再生制动将发出的电能反送到导电轨道上,到达空中站台一个空中站台时车头通过电磁制动准确地停靠在第一个空中站台,空中巴士的车门打开,第一个空中站台的闸口打开,空中站台上的人从车头、中间车厢和车尾的左侧前门上车,车头、中间车厢和车尾从车头、中间车厢和车尾的左侧后门下车。上下车完毕后,关闭车头、中间车厢和车尾左侧的前门和后门,关闭第一个空中站台的闸口,通过无人驾驶控制系统重新给车头顶部后段装有的动力橡胶车轮3’外转子永磁同步电机供电,从而使车头的动力橡胶车轮3’转动带动空中巴士前进。如果空中巴士的车头出故障,无人驾驶系统会使用车尾的电源给车尾顶部前段装有的永磁同步电机供电;如果空中巴士的车头和车尾同时出故障,则需要用后面的空中巴士推着前面的车头和车尾同时出故障的空中巴士前进到达终点站。空中巴士靠近终点站的岔道时,电脑控制仪给终点站自动扳道岔,空中巴士的车头进入钢板制成的接头,车头顶部左边的导向轮压在钢板制成的接头窄口左侧钢条上推着车头向右转进入窄口水泥槽1,然后依次是第一节中间车厢左边的导向轮、第二节中间车厢左边的导向轮、车尾左边的导向轮压在钢板制成的接头窄口左侧钢条上推着这些部位向右转进入窄口水泥槽1。车头实行再生制动将发出的电能反送到导电轨道上,到达终点站时车头通过电磁制动准确地停靠在终点站。电脑控制仪将终点站控制站台的闸口打开,无人驾驶系统把空中巴士的车头、中间车厢和车尾左侧后门打开,下车的人从空中巴士的车头、中间车厢和车尾左侧后门下车。无人驾驶系统把空中巴士的车头、中间车厢和车尾右侧前门打开,上车的人从空中巴士的车头、中间车厢和车尾右侧前门上车。关上该空中巴士车门后,该空中巴士的车头变成车尾、车尾变成车头,该空中巴士将终点站转变成始发站,将钢板制成的接头的左边变成右边;将钢板制成的接头的右边变成左边。
20.由于活动固定车轮2和动力固定车轮3都是表面有一层碳素纤维铝合金的车轮,与车轮轨道的摩擦力大、噪音低,所以提速很快。由于活动橡胶车轮2’和动力橡胶车轮3’都是橡胶车轮,所以空中巴士在直线线路上能够像电动巴士在直线公路上那样,在200米内10秒钟启动加速到每小时100公里,而且噪音低。传统的空中轨道列车启动和加速是非常缓慢的,空中轨道列车的时速不超过每小时80公里,如果两站间隔1公里,空中轨道列车只能加速到每小时501公里,而且空中轨道列车的噪音很大。由于空中巴士的机腿上装有导向轮,在不使用方向盘的情况下,空中巴士能够转动转弯。独轮城市巴士转弯半径较小,非常城市交通十字路口多转弯半径小的路况。动力车轮是外转子永磁同步电机,减少了齿轮传动造成的噪音,结构更加紧凑。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1