机车车辆信息与车轮信息的匹配关系确定系统和方法与流程
1.本发明涉及与机车车辆及其车轮相关的信息化技术,具体涉及确定机车车辆信息与安装于机车车辆上的各个车轮的信息之间的匹配关系的技术。
背景技术:
2.目前中国铁路部门正在逐步实现信息化、智能化。
3.准确地记录机车车辆信息及其安装的车轮的信息的匹配关系是实现信息化、智能化的重要一环。这是因为,只有在准确地记录了机车车辆信息及其车轮信息的匹配关系的基础之上才能对机车车辆和车轮创建履历。通过创建机车车辆、特别是每个车轮的检测和使用履历,能够用来分析、统计数据而实现信息化,并能够基于分析数据和统计数据预测故障,实现智能化。
4.作为获取关于机车车辆及其车轮的信息的现有技术,有利用射频标签来获取信息的技术等。利用射频标签读取设备读取安装在机车车辆的射频标签中记录的信息,能够得知该机车车辆的型号等信息。此外,通过读取安装在车轮上的射频标签中的信息,能够得到包括车轮的轮号在内的车轮信息。
5.虽然已经存在利用射频标签来获取关于机车车辆及其车轮的信息的技术,但是目前机车车辆信息及其安装的车轮的信息的匹配关系是在装配、检修机车车辆及其车轮时由作业人员手工记录的。
技术实现要素:
6.由于采用人工记录来进行数据的匹配,现有的机车车辆信息及其车轮信息的匹配关系记录中广泛存在错记、漏记的问题。而如果采用人工的方式去修正错记、漏记的问题,不仅需要花费大量人力和时间,还可能产生新的记录问题,因此很难确保匹配关系的高准确性。
7.本发明是为了解决上述技术问题而做出的,其目的在于提供一种自动地确定机车车辆信息和安装于其上的各个车轮的信息的匹配关系的机车车辆信息与其车轮信息的匹配关系确定系统和方法,其能够省去人力干预并节省时间,还能够确保匹配关系的高准确性。
8.为此,在本发明的第一方面的确定具有多个车轮的机车车辆的机车车辆信息与所述多个车轮的车轮信息的匹配关系的匹配关系确定系统包括:供机车车辆行驶的两条铁轨;机车车辆信息获取装置,其从驶过的机车车辆获取包括型号信息和端位信息在内的机车车辆信息;至少一对车轮信息获取装置组,其对称设置在两条所述铁轨各自的外侧,用于在车辆驶过时获取来自各个所述车轮的车轮信息提供装置的该车轮的车轮信息,其中各个所述车轮信息获取装置组均包括沿所述铁轨的方向设置的多个车轮信息获取装置,每个车轮的车轮信息至少包括轮号;至少一对车轮传感器,其分别对应地设置在至少一对所述车轮信息获取装置组的沿所述铁轨的方向的前侧和后侧,在车轮经过时产生触发信息;和控
制处理装置,其能够控制所述机车车辆信息获取装置、所述车轮信息获取装置组和所述车轮传感器,在车辆驶过时接收来自上述各装置的信息,并进行匹配关系的确定,所述控制处理装置基于所述型号信息、所述端位信息、所述车轮信息、各所述车轮信息获取装置组中的各个车轮信息获取装置的设置位置信息及获取所述车轮信息时的识别时刻信息、以及所述触发信息,来确定所述车轮信息与所述机车车辆信息的匹配关系。
9.本发明的第二方面的匹配关系确定系统,是在第一方面的匹配关系确定系统中,所述控制处理装置,基于来自所述机车车辆信息获取装置的所述型号信息和所述端位信息来确定所述机车车辆的轴数和端位,对于已通过所述车轮信息确定的任一个车轮,基于同一个车轮信息获取装置组中的各所述车轮信息获取装置在规定时间区间内获取该任一个车轮的车轮信息的次数,来确定用于判断该任一个车轮在所述机车车辆上的轴位的信息获取时间和在该信息获取时间获取了该任一个车轮的车轮信息获取装置的设置位置信息,基于所述信息获取时间、所述设置位置信息和与所述同一个车轮信息获取装置组对应的一对车轮传感器在到所述信息获取时间为止所产生触发信息的数量,来确定所述任一个车轮被识别的顺序即轮序,在对所有车轮确定了所述轮序后,基于所确定的所述机车车辆的轴数和端位,来确定所有车轮的车轮信息与所述机车车辆信息的匹配关系。
10.本发明的第三方面的匹配关系确定系统,是在第一或第二方面的匹配关系确定系统中,所述车轮信息提供装置是设置在每个车轮上的车轮射频标签,所述车轮信息获取装置包括用于发射射频信号并接收来自所述车轮射频标签的射频信号的第一天线装置。
11.本发明的第四方面的匹配关系确定系统,是在第一至第三方面的匹配关系确定系统中,所述机车车辆信息获取装置包括设置在所述铁轨的外侧的图像采集装置,其能够从拍摄到的所述机车车辆的图像中获取该机车车辆的型号信息和端位信息。
12.本发明的第五方面的匹配关系确定系统,是在第四方面的匹配关系确定系统中,所述机车车辆信息获取装置还包括用于接收来自所述机车车辆上的车辆射频标签的射频信号的第一天线装置,其能够从接收到的射频信号中获取该机车车辆的型号信息。
13.本发明的第六方面的匹配关系确定系统,是在第一至第五方面的匹配关系确定系统中,所述车轮传感器包括磁性体和能够产生磁感应电动势的感应线圈,在车轮经过时基于随着所述车轮与所述车轮传感器的距离的变化而变化的磁感应电动势来产生触发信息。
14.本发明的第七方面的匹配关系确定系统,是在第一至第六方面的匹配关系确定系统中,对应地设置的一对所述车轮传感器之间的距离,大于所述机车车辆的同一个转向架的2个轴位的车轮所在部分的长度,且小于所述机车车辆的同一个转向架的3个轴位的车轮所在部分的长度。
15.本发明的第八方面的匹配关系确定系统,是在第一至第七方面的匹配关系确定系统中,每一个所述车轮信息获取装置组中包括4个所述车轮信息获取装置,该4个所述车轮信息获取装置的安装范围大于所述车轮的周长的一半且小于所述车轮的周长。
16.本发明的第九方面是一种使用第一方面的匹配关系确定系统来确定所述机车车辆信息与所述多个车轮的车轮信息的匹配关系的匹配关系确定方法,其包括:由所述机车车辆信息获取装置从驶过的所述机车车辆获取包括型号信息和端位信息在内的机车车辆信息的步骤;由所述车轮信息获取装置组在车辆驶过时获取来自各个所述车轮的所述车轮信息提供装置的该车轮的车轮信息的步骤;由所述至少一对车轮传感器在车轮经过时产生
触发信息的步骤;匹配关系确定步骤,由所述控制处理装置基于所述型号信息、所述端位信息、所述车轮信息、各所述车轮信息获取装置组中的各个车轮信息获取装置的设置位置信息及获取所述车轮信息时的识别时刻信息、以及所述触发信息,来确定所述车轮信息与所述机车车辆信息的匹配关系。
17.本发明的第十方面的匹配关系确定方法,是在第九方面的匹配关系确定方法中,所述匹配关系确定步骤包括:基于来自所述机车车辆信息获取装置的所述型号信息和所述端位信息来确定所述机车车辆的轴数和端位的步骤;对于已通过所述车轮信息确定的任一个车轮,基于同一个车轮信息获取装置组中的各所述车轮信息获取装置在规定时间区间内获取该任一个车轮的车轮信息的次数,来确定用于判断该任一个车轮在所述机车车辆上的轴位的信息获取时间和在该信息获取时间获取了该任一个车轮的车轮信息获取装置的设置位置信息的步骤;基于所述信息获取时间、所述设置位置信息和与所述同一个车轮信息获取装置组对应的一对车轮传感器在到所述信息获取时间为止所产生触发信息的数量,来确定所述任一个车轮被识别的顺序即轮序的步骤;和在对所有车轮确定了所述轮序后,基于所确定的所述机车车辆的轴数和端信,来确定所有车轮的车轮信息与所述机车车辆信息的匹配关系的步骤。
18.依照本发明的机车车辆信息与车轮信息的匹配关系确定系统和方法,能够自动地获取机车车辆及其车轮的匹配关系,不仅省去人力干预并节省时间,而且能够确保高准确性。
附图说明
19.图1是表示机车车辆的示意图。
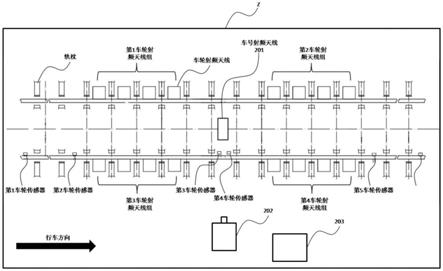
20.图2是本发明的机车车辆信息与车轮信息的匹配关系确定系统的结构的示意图。
21.图3是表示车轮识别原始数据的一例的图。
22.图4是表示本发明中进行机车车辆信息与车轮信息的匹配的方法的示意图。
23.图5是表示控制处理装置从车轮识别原始数据和采集到的其它各种信息分析出车轮的轮序的流程图。
24.图6是用于说明根据车轮传感器的触发信息之差确定车轮的识别顺序的方法的图。
25.图7是表示对分析出的各车轮的轮序进行合并而得到最终确定轮序的表。
26.图8是表示左侧各车轮的轮序与机车车辆的端位的关系的表。
具体实施方式
27.本发明的机车车辆信息与其车轮信息的匹配关系确定系统安装在对机车车辆进行检测的机务段等处。通过设置在机务段等处的机车车辆信息获取装置、车轮信息获取装置、图像采集装置和车轮传感器等地面设备来采集机车车辆和安装在其上的车轮的信息,并由控制处理装置进行数据的分析处理,来自动地匹配机车车辆信息及其车轮信息。
28.在说明机车车辆信息与其车轮信息的匹配关系确定系统之前,首先说明作为匹配关系确定对象的机车车辆及其车轮。
29.本发明的机车车辆信息与其车轮信息的匹配关系确定系统和方法的识别对象是
机车车辆100和安装在其上的多个车轮w。在下述说明中,机车车辆100是指通常所说的火车头以及由火车头牵引的客车车厢和货车车厢。
30.图1是表示机车车辆的示意图。如图1所示,在机车车辆100的中央底部固定有射频标签(车辆射频标签)101并且在其车身上喷涂有该机车车辆100的型号。机车车辆100的射频标签101中例如存储有机车车辆的型号、机车车辆的配属、检修情况等信息,机车车辆的配属是指机车车辆所属的铁路局、机务段等的信息,检修情况是指每次对机车车辆进行检修时记录的信息。此处所说的机车车辆的型号是机车车辆车型的编号与机车车辆的车号组合而成的,是唯一表示该机车车辆的身份的编号。
31.机车车辆100经由未图示的转向架配装有多个车轮w,转向架的所在位置由图1中的点划线框b示意性地表示。转向架能够支承机车车体,通过轴承装置使车轮w沿铁轨的滚动转化为车体沿线路运行的平动。在图1所示的机车车辆100的前底部和后底部各安装有一个转向架,两个转向架上各安装有3轴共6个车轮w,并且两个转向架之间隔开了规定的距离。其中,一个转向架上安装的车轮的个数不限于3轴共6个,也可以是2轴共4个。
32.在每一个车轮w上都固定有车轮的射频标签(车轮射频标签)w1,其用于存储关于其所在的车轮的多种信息,例如包括该车轮的轮号、出厂信息、制造单位等各种信息。射频标签w1例如可以设置在每个车轮w的轮毂外周处,并且在每个车轮的轮毂外周处对称地设置2个射频标签w1,这样能够保证车轮进入识别区域时,即使距离射频天线组最近的一个射频标签离开射频天线发射角的覆盖区域,其对称位置上的另一个射频标签在车轮驶离信息采集区域前也能够进入天线发射角的覆盖区域,确保任一个车轮的射频标签w1被可靠地识别。另外,即使同一个车轮w的一个射频标签w1遗失或失效,也能够从另一个射频标签w1读取该车轮w信息,能够确保信息读取的可靠性。
33.机车车辆100的射频标签101和车轮w的射频标签w1都是射频标签,作为机车车辆和车轮的信息提供装置,分别存储有机车车辆和车轮的信息,能够接收来自射频天线的载波信号,在接收到载波信号后将所存储的数据按规定的编码对该载波信号进行调制并将其反射回车轮射频天线,由此射频标签中的信息能够分别被射频天线等信息获取装置获取。此处所说的射频标签101和w1例如是符合中国国家标准gb/t 25340-2010的规定的射频标签,但并不限于这样的射频标签,只要是能够通过近距离无线通信来进行信息的传输且通信距离足够远的信息发送装置均适用于本发明。
34.另外,我国现有的机车包括6轴和8轴的机车,轴数表示用于装配车轮的轴的数量。例如一辆机车车辆有6轴,从机车车辆的首端向尾端数为第1至第6轴,每轴能够配装左右2个车轮共计12个车轮。机车上的每个车轮所安装的位置为轮位,是指机车的某一轴的左侧或右侧配装车轮的位置。例如,轮位可以表示为第3轴左侧位置,即从机车首端向尾端数第3轴的轮对中的左侧的车轮所在的位置。
35.下面说明本发明的机车车辆信息与车轮信息的匹配关系确定系统200的构成。
36.如上所述,机车车辆信息与车轮信息的匹配关系确定系统200的各地面设备安装在机务段等处,包括多个车轮传感器、1个车号射频天线201、多个车轮射频天线组、图像采集装置202,以及通过有线或无线的方式与这些设备可通信地连接的控制处理装置203。设置有这些地面设备的区域是对经过的机车车辆及其车轮进行信息采集的信息采集区域z。
37.如图2所示,车号射频天线201设置在信息采集区域z中两条铁轨的正中央。在机车
车辆100通过这段铁轨而固定在机车车辆100的车底的射频标签101经过该车号射频天线201的上方时,该车号射频天线201通过射频的方式读取机车射频标签101内的信息并将读取到的信息传输至控制处理装置203,该信息至少包括机车车辆100的型号。从机车车辆100的型号能够知道该机车是几轴的机车车辆。
38.在图2中的信息采集区域z的下部的大致中央,设置有图像采集装置202。由于机车车辆100的车身上喷涂有其型号,因此,图像采集装置202能够拍摄车身上的型号并对拍摄到的图像进行识别处理来识别出其型号。从图像采集装置202识别出的机车车辆100的型号同样能够知道该机车车辆是几轴的机车车辆。并且,通过对驶来的机车车辆100进行拍摄,能够判断出机车车辆100行进的前端是其首端还是尾端。
39.车号射频天线201通过读取射频标签101的信息来识别该机车车辆100并采集其信息,图像采集装置202通过拍摄机车车辆100并进行图像处理来识别该机车车辆100并采集其信息。
40.车号射频天线201从机车车辆100的射频标签101读取的信息和图像采集装置202拍摄机车车辆100而获得的信息都被发送至控制处理装置203,由控制处理装置203用于机车车辆100的识别和与其车轮w信息的匹配。
41.在本发明的机车车辆信息与车轮信息的匹配关系确定系统200中,为了确定机车车辆信息与车轮信息的匹配关系,需要获取机车车辆100的型号并判断出机车车辆100的端位,即机车车辆100行进的前端是其首端还是尾端。利用图像采集装置202能够同时获取机车车辆100的型号和端位,因此能够仅将图像采集装置202作为用于获取机车车辆100的型号信息和端位信息的机车车辆信息获取装置。车号射频天线201能够从射频标签101读取机车车辆100的型号信息,通过在使用图像采集装置202的同时还使用车号射频天线201,能够对由图像采集装置202识别出的型号信息进行验证,确保所获取的型号信息的准确性。
42.在图2中的车号射频天线201的下方,在夹着车号射频天线201的相邻的两条轨枕之间沿着铁轨内侧设置有两个车轮传感器,将其称为第3车轮传感器和第4车轮传感器。在图2纸面中的第3车轮传感器的左侧,依次设置有第2车轮传感器和第1车轮传感器,而在第4车轮传感器的右侧,依次设置有第5车轮传感器和第6车轮传感器。各车轮传感器用于感测车轮,当有车轮经过其上方时向控制处理装置203发送感测信号。
43.车轮传感器例如能够采用磁感应传感器,其主要构成部件为永磁体和感应线圈,此外还包括车轮传感器的骨架、壳体和填充材料。这样的车轮传感器安装在铁轨的内侧且不与车轮接触。随着车轮与车轮传感器的距离的变化,车轮与车轮传感器之间的磁路发生变化,从而产生感应电动势的变化。当车轮从远处接近车轮传感器后远离车轮传感器时,感应电动势也从小变大后变小。当检测到一次这样的变化过程时,车轮传感器能够输出一个触发信息作为感测信号。
44.第1车轮传感器和第6车轮传感器用作起动传感器。即,当机车车辆100从一个方向驶来时,第1车轮传感器和第6车轮传感器中的一者先检测到机车车辆100的车轮而向控制处理装置203发送感测信号,另一者后检测到车轮后也向控制处理装置203发送感测信号。在机车车辆100沿着从第1车轮传感器去往第6车轮传感器的方向进入信息采集区域z的情况下,当第1车轮传感器发出感测信号时,说明机车车辆100正在进入信息采集区域,此时可以由控制处理装置203向后述的车轮射频天线发出起动命令,各车轮射频天线开始工作,读
取经过其附近的车轮射频标签的信息,之后第6车轮传感器发出感测信号,说明机车车辆100的行进前端已开始驶出信息采集区域z。当第6车轮传感器先发出感测信号时,说明机车车辆100是在要离开机务段时进入信息采集区域z。如果仅在机车车辆100驶入机务段而进入信息采集区域z时进行车轮检测,但在机车车辆100从机务段驶出而进入信息采集区域z时不进行车轮的信息采集,则此时不起动各车轮射频天线。当然,也可以与此相反,仅在机车车辆100从机务段驶出而进入信息采集区域z时进行车轮检测,但在驶入时不进行车轮的信息采集,还可以在机车驶入驶出机务段时均进行车轮的信息采集。
45.如果在第1车轮传感器和第6车轮传感器中的一者感测到机车车辆100的车轮,但经过规定时间后另一者以及第2至第5车轮传感器中的任意个没有感测到机车车辆100的车轮,则认为机车车辆100停在了信息采集区域z,此时机车车辆信息与车轮信息的匹配关系确定系统200无法完整地采集机车车辆100的车轮的信息,因此控制处理装置203可以不进行此次已采集到的信息的处理。
46.如果控制处理装置203在接收到来自第1车轮传感器的感测信号后接收到来自第6车轮传感器的感测信号,又在接收到来自第6车轮传感器的感测信号之后接收到来自第1车轮传感器的感测信号,说明机车车辆100在驶入信息采集区域z后在没有完全离开信息采集区域z的情况下反向行驶,在此情况下机车车辆信息与车轮信息的匹配关系确定系统200也无法完整地采集机车车辆100的车轮的信息,因此控制处理装置203也可以不进行此次已采集到的信息的处理。
47.在机务段,为了检测机车车辆的到来而起动各设备需要设置第1车轮传感器和第6车轮传感器,但在本发明的机车车辆信息与车轮信息的匹配关系确定系统200中,为了分析出各车轮的识别顺序而确定机车车辆信息与其车轮信息的匹配关系,无需用到第1车轮传感器和第6车轮传感器,只要具有第2至第5车轮传感器中的至少一对车轮传感器(在图2中为第2车轮传感器与第3车轮传感器、和/或第4车轮传感器与第5车轮传感器)即可。
48.在第2车轮传感器与第3车轮传感器之间,在两条铁轨的外侧沿着铁轨各设置有4个车轮射频天线,将铁轨同一侧的4个车轮射频天线作为一组,图2中上侧的一组车轮射频天线为第1车轮射频天线组,下侧的一组车轮射频天线为第3车轮射频天线组。
49.同样,在第4车轮传感器与第5车轮传感器之间,在两条铁轨的外侧沿着铁轨各设置有4个车轮射频天线,将铁轨同一侧的4个车轮射频天线作为一组,图2中上侧的一组车轮射频天线为第2车轮射频天线组,下侧的一组车轮射频天线为第4车轮射频天线组。
50.在本发明的匹配关系确定系统中,第2车轮传感器与第3车轮传感器之间的距离,以及第4车轮传感器与第5车轮传感器之间的距离,优选大于所述机车车辆的同一个转向架的2个轴位的车轮所在部分的长度,且小于所述机车车辆的同一个转向架的3个轴位的车轮所在部分的长度。其作用效果是,对于车轮大小不同的各种机车车辆,采用本发明的匹配关系确定系统能够准确的确定机车车辆的轴位。
51.图2中示出了4组共16个车轮射频天线,每个车轮射频天线都设置在两根轨枕之间,通过这样设置,每一组车轮射频天线组的设置范围小于机车车辆的车轮周长。并且,为了确保射频标签w1的信息能够被该车轮射频天线组中的至少一个车轮射频天线读取,每一组车轮射频天线组的设置范围应大于机车车辆的车轮周长的1/2。优选每一组车轮射频天线组的设置范围为机车车辆的车轮周长的3/4。由此,当机车车辆100经过任一个车轮射频
天线组时,其所有车轮必然在该车轮射频天线组的可测范围内转动一周,因此只要该车轮的射频标签w1有效,即能够确保该射频标签w1的信息被该车轮射频天线组中的至少一个车轮射频天线读取。为了更可靠地确保车轮的信息被读取,也可以如图1所示在车轮的轮毂外周侧对称地设置2个射频标签w1。
52.各个车轮射频天线均具有编号,从该编号能够确定该车轮射频天线安装在哪一个车轮射频天线组的哪一个位置。车轮射频天线对控制处理装置203发送识别出的车轮w的信息的同时,也将其编号发送至控制处理装置203。因此,控制处理装置203能够确定发来车轮信息的车轮射频天线的位置信息,即该车轮射频天线是哪一个车轮射频天线组的哪一个位置的车轮射频天线。
53.通过如上所述设置车轮射频天线,当有机车通过信息采集区域z时,车轮射频标签进入到任一车轮射频天线的读取范围内则其信息被该车轮射频天线读取。存储于车轮射频标签的信息即能够被车轮射频天线读取的信息包括车轮的轮号,轮号也称为单件码或epc,是能够唯一确定车轮的编号。车轮射频天线组通过读取车轮射频标签的信息来识别该车轮并采集该车轮的信息。
54.上述说明中以机车信息获取装置和车轮信息获取装置是射频天线、机车信息发送装置和车轮信息提供装置是射频标签为例进行了说明,但这些信息获取装置和信息发送装置不限于射频天线和射频标签,只要是能够进行短距离通信的装置即可。
55.各车轮射频天线在读取出车轮w的信息后,实时地或在机车车辆100驶过信息采集区域z后将识别出的车轮w的epc、被识别时的具体时间、被识别时的信号强度、识别该车轮w的车轮射频天线编号等信息一起,作为车轮识别原始数据发送至控制处理装置203,用于进行机车车辆100信息与其车轮w信息的匹配。车轮识别原始数据的一例示于图3。
56.当机车车辆100已从信息采集区域z驶过后,控制处理装置203接收到上述车轮识别原始数据以及来自各车轮传感器、车号射频天线201和图像采集装置202的信息,对这些信息进行分析处理来识别机车车辆100和车轮w并获取机车车辆100信息与其车轮w信息的匹配关系。
57.本发明的机车车辆信息与车轮信息的匹配关系确定系统200进行机车车辆信息与车轮信息的匹配的方法如下。如图4所示,由作为机车车辆信息获取装置的车号射频天线201和图像采集装置202从机车车辆100上射频标签101和型号涂装获取机车车辆100的型号信息和端位信息,并由至少一对作为车轮信息获取装置组的车轮射频天线组从车轮w上的作为车轮信息提供装置的射频标签w1获取车轮的轮号等车轮信息,设置在每一对作为车轮信息获取装置组的车轮射频天线组的沿铁轨的方向的前侧和后侧的至少一对车轮传感器在车轮经过时产生触发信息。上述车轮信息和车轮传感器产生触发信息(即识别到车轮)为车轮识别原始信息,控制处理装置203接收车轮识别原始信息和采集到的机车车辆100的型号信息和端位信息等其它各种信息,来确定车轮信息与机车车辆信息的匹配关系。其中,由于车号射频天线201非机车车辆信息与车轮信息的匹配关系确定系统200的必须构成部分,所以其功能“获得射频识别信息并发送至控制处理装置”用虚线框表示。
58.下面结合图5详细说明控制处理装置203从车轮识别原始数据和采集到的其它各种信息分析出车轮的轮序的方法,即对图4中的“控制处理装置分析得到匹配关系”进行具体说明。
59.由于在控制处理装置203分析机车车轮匹配关系时已从各路面设备获取了机车车辆100的识别信息,因此,控制处理装置203能够根据来自车号射频天线201和图像采集装置202的信息确定驶入信息采集区域z的机车车辆100的型号,由此获知该机车车辆100是几轴的机车。并且,根据图像采集装置202对驶来的机车车辆100进行拍摄而分析出的结果,控制处理装置203能够获知该机车车辆100是首端还是尾端进入信息采集区域z。此外,根据来自第1车轮传感器和第6车轮传感器的感测信息,控制处理装置203能够获知该机车车辆100是从哪个方向进入信息采集区域z的。在以下的说明中,将作为被识别匹配对象的机车车辆100的轴数、进入信息采集区域是哪一端从哪个方向进入信息采集区域作为已知信息进行说明。
60.首先,在步骤s1中,按车轮射频天线组对车轮识别原始数据进行分组。即,对于由所有车轮射频天线采集到的车轮识别原始数据,将第1车轮射频天线组、第2车轮射频天线组、第3车轮射频天线组、第4车轮射频天线组的各组的车轮射频天线所采集到的车轮识别原始数据分在一组,即形成第1车轮识别原始数据组、第2车轮识别原始数据组、第3车轮识别原始数据组和第4车轮识别原始数据组,后述的数据处理按各车轮识别原始数据组进行。
61.然后,在步骤s2中,通过epc对各个车轮识别原始数据组内的数据再进行分组。如上所述,在同一个车轮识别原始数据组中,存在同一个车轮射频天线组的各车轮射频天线读取出的多个车轮的数据,在此步骤中,提取该车轮射频天线组的各车轮射频天线读取到的同一个车轮w的数据并按时间先顺序进行排序。以任一个车轮w在第m车轮射频天线组中的数据为例,令在此步骤中对该车轮w提取出的数据为wm,其中m是第1至第4车轮射频天线组中的一者。wm表示任一个车轮w被第m车轮射频天线组中的各车轮射频天线识别而获得的多个数据,其中包括识别出的车轮w的epc、被识别时的具体时间、被识别时的信号强度、识别该车轮w的车轮射频天线编号等。任一个车轮w每被识别出一次就有一组上述数据,该车轮w在经过车轮射频天线组m时会被识别多次,因此有多组这样的数据。
62.通过上述步骤s1和s2,确定了要进行识别排序来确定与机车车辆信息的匹配关系的任一个车轮w。
63.为了确定车轮射频天线组m中的哪一个车轮射频天线识别出了车轮w而进行下述步骤s3。即,从wm中读取车轮w被车轮射频天线组m中的各车轮射频天线识别时的识别时间,以每一次识别的识别时间为起点,分别统计例如200ms内该车轮w的识别数据的组数,即从各识别时间起的200ms内车轮w被识别了多少次。在对wm的每一次识别都统计了从识别时间起的200ms内车轮w的识别数据的组数之后,提取其中识别数据的组数最多的识别时间区间。该识别时间区间是指从某一次识别时间起的200ms的时间区间,在该时间区间内车轮w的识别数据的组数最多,将该识别时间区间所对应的识别时间作为该车轮w在车轮射频天线组m的识别范围内的采样识别时间t。将在这样的识别时间区间中识别车轮w的次数最多的车轮射频天线的编号记为x。其中,车轮w的识别数据的组数最多的识别时间区间可能不只一个,此时取时间上最早的一个作为识别时间区间。此外,上述的200ms仅是识别时间区间的一例,也可以不是200ms而是其它合适的值。
64.其中,在本实施方式中,车轮射频天线按照例如100hz的脉冲频率发射例如900mhz的载波信号,信号接收范围内的车轮射频标签在接收到载波信号后,将车轮射频标签内存储的数据按规定的编码对该载波信号进行反射调制并将其反射回车轮射频天线,由此车轮
射频天线从车轮射频标签读取了该车轮射频标签中存储的信息。车轮射频标签进行接收、调制、反射所需的时间可以忽略不计,因此,车轮射频天线从车轮射频标签读取信息的采样频率视为100hz,即每10ms能够读取一次车轮射频标签的信息。
65.并且,由于车轮射频天线与车轮射频标签之间的距离、角度等的影响,车轮射频天线无法在每一个10ms都接收到来自车轮射频标签的信息,因此在200ms内,车轮射频天线从车轮射频标签读取到信息的次数小于等于“200ms/10ms=20”次。理论上,当在该规定时间内车轮射频标签刚好位于车轮射频天线正上方时,信息读取次数最多,为20次。
66.由此,通过上述步骤s3,确认了在采样识别时间t时,车轮w正在被车轮射频天线组m中的编号x的车轮射频天线识别,并且,在该采样识别时间t内,车轮w与编号x的车轮射频天线的相对位置为最容易进行信息的读取的相对位置。并且,由于确定了车轮射频天线的编号x及其所在的车轮射频天线组m,因此确定了识别出车轮w的车轮射频天线x的设置位置信息。
67.接着,在步骤s4中对设置在各车轮射频天线组前后的车轮传感器的感测信息进行分析。
68.如上所述,在第1车轮射频天线组和第3车轮射频天线组的前后分别设置有第2车轮传感器和第3车轮传感器,在第2车轮射频天线组和第4车轮射频天线组的前后分别设置有第4车轮传感器和第5车轮传感器,各车轮传感器在每一次有车轮经过时都产生一次感测信息,控制处理装置203对各车轮传感器产生感测信息的次数进行计数。
69.控制处理装置203首先对第2车轮传感器、第3车轮传感器、第4车轮传感器和第5车轮传感器的计数进行统计,如果各车轮传感器的计数均相等且为6或8的整倍数,则表示6轴机车或8轴机车车辆已完全通过了识别区域,能够进行轮位的匹配。如果不满足各车轮传感器的计数均相等且为6或8的整倍数,则表示机车没有完全通过识别区域,无法对所有的车轮w进行后续的轮序确定和轮位匹配。此时,控制处理装置203不进行后续处理而终止处理。
70.在能够确定车轮被识别的顺序即轮序的情况下,进入步骤s5的轮序确定处理。下面以第1车轮射频天线组为例进行说明。
71.在上述步骤s3中,已获得了车轮w被第1车轮射频天线组中的编号x的车轮射频天线识别的信息,其中包括采样识别时间t。
72.因为第2车轮传感器和第3车轮传感器设置在第1车轮射频天线组和第3车轮射频天线组的前后,第4车轮传感器和第5车轮传感器设置在第2车轮射频天线组和第4车轮射频天线组的前后,所以第2车轮传感器和第3车轮传感器的计数与第1车轮射频天线组和第3车轮射频天线组的识别数据相匹配,第4车轮传感器和第5车轮传感器的计数与第2车轮射频天线组和第4车轮射频天线组的识别数据相匹配。对于第1车轮射频天线组,控制处理装置203对第2车轮传感器和第3车轮传感器在上述采样识别时间t时的感测情况的计数进行统计,在此令第2车轮传感器和第3车轮传感器各自的计数分别为a和b,并且令机车从图2中的左侧向右侧行驶,所以先经过第2车轮传感器后再经过第3车轮传感器,由此a≥b。
73.下面参照图6说明使用第2车轮传感器和第3车轮传感器的计数和识别了车轮w的车轮射频天线的编号x来确定车轮w的轮序的方法。
74.如果在采样识别时间t时机车车辆已完全通过第2车轮传感器和第3车轮传感器,则a=b,即第2车轮传感器和第3车轮传感器各自的计数均为机车的轴数,在6轴机车的情况
下为6,在8轴机车的情况下为8。在a=b时,机车的所有车轮均已通过第2车轮传感器和第3车轮传感器,其间没有车轮,无法进行轮序的确定。因此忽略a=b的情况。
75.如果在采样识别时间t时机车没有完全通过第2车轮传感器和第3车轮传感器,则a>b。这是因为第2车轮传感器与第3车轮传感器之间的距离大于相邻的两个车轴之间的距离且小于相邻的三个车轴之间的距离,如果机车没有完全通过第2车轮传感器和第3车轮传感器,则必然有车轮位于第2车轮传感器与第3车轮传感器之间,该车轮已被第2车轮传感器计数但未被第3车轮传感器计数。
76.正是由于第2车轮传感器与第3车轮传感器之间的距离大于相邻的两个轴位的车轮所在的部分的长度且小于相邻的三个轴位的车轮所在的部分之间的距离,所以如果位于第2车轮传感器与第3车轮传感器之间的车轮大致位于第2车轮传感器与第3车轮传感器的正中间的一定范围内时,仅有该车轮位于第2车轮传感器与第3车轮传感器之间,此时a-b=1,该车轮为作为轮位匹配对象的车轮w。而在一个车轮位于第2车轮传感器与第3车轮传感器之间的靠近第2车轮传感器的一侧时,在第2车轮传感器与第3车轮传感器之间的靠近第3车轮传感器的一侧还有该车轮的相邻前侧的车轮,此时a-b=2。
77.如上所述,从第2车轮传感器和第3车轮传感器的计数能够得到a-b=1和a-b=2这两种情况。
78.在a-b=1的情况下,采样识别时间t时第2车轮传感器的计数比第3车轮传感器的计数大1,仅有一个车轮在第2车轮传感器与第3车轮传感器之间,该车轮已被第2车轮传感器计数但未被第3车轮传感器计数。因此,该车轮是作为轮序确定对象的车轮w,其被识别的顺序为第2车轮传感器的计数即a。
79.在a-b=2的情况下,第2车轮传感器的计数比第3车轮传感器的计数大2,有两个车轮在第2车轮传感器与第3车轮传感器之间,这两个车轮已被第2车轮传感器计数但未被第3车轮传感器计数。此时,为了判断这两个车轮中的哪一个是上述作为轮位判断对象的车轮w,需要确定识别了该车轮w的车轮射频天线的编号即编号x。
80.在编号x的车轮射频天线为第1车轮射频天线组中的1号车轮射频天线或2号车轮射频天线时,车轮w位于第2车轮传感器与第3车轮传感器之间的靠近第2车轮传感器的一侧,另一个车轮位于第2车轮传感器与第3车轮传感器之间的靠近第3车轮传感器的一侧,车轮w被识别的顺序为a,其相邻前侧的也位于第2车轮传感器与第3车轮传感器之间的车轮被识别的顺序为a-1。在编号x的车轮射频天线为第1车轮射频天线组的3号车轮射频天线或4号车轮射频天线时,车轮w位于第2车轮传感器与第3车轮传感器之间的靠近第3车轮传感器的一侧,另一个车轮位于第2车轮传感器与第3车轮传感器之间的靠近第2车轮传感器的一侧,车轮w被识别的顺序为a-1,其相邻后侧的也位于第2车轮传感器与第3车轮传感器之间的车轮被识别的顺序为a。
81.在到上述步骤s5为止的数据处理流程中,进行了一个车轮射频天线组所采集的车轮识别数据中的一个车轮w的轮序确定处理。由于第1车轮射频天线组-第4车轮射频天线组各自独立地识别车轮,所以在机车车辆100正常通过信息采集区域z时,与第1车轮射频天线组位于铁轨同一侧的第2车轮射频天线组也采集到了与第1车轮射频天线组所采集到的数据类似的数据,基于这些数据和上述方法,同样能够获知车轮w被识别的顺序。而对于机车右侧(图2中的下侧)的车轮,也与第1车轮射频天线组的情况同样地采集数据并分析数据,
能够获知各车轮被识别的顺序。
82.在步骤s6中判断是否已对所有车轮分别确定了轮序,如果还存在没有确定轮序的车轮,则返回步骤s2对没有确定轮序的车轮确定轮序,如果对所有的车轮确定了轮序,则在步骤s7中将第1车轮射频天线组与第2车轮射频天线组的数据和第3车轮射频天线组与第4车轮射频天线组的数据分别按照分析出的车轮被识别的顺序进行合并,来得到所有车轮的最终确定轮序。
83.图7是表示对分析出的各车轮的轮序进行合并而得到最终确定轮序的表。该表中示出了项目包括进行合并时的优先顺序、基于第1车轮射频天线组的识别数据分析出的轮序、基于第2车轮射频天线组的识别数据分析出的轮序以及合并后确定的最终确定轮序。对于第3车轮射频天线组与第4车轮射频天线组的数据,也与该表所示的顺序和方法同样地进行数据合并。
84.进行合并时,首先对用第1车轮射频天线组和第2车轮射频天线组的车轮识别数据分析出的车轮识别顺序一致的数据进行合并。在图6的表中优先顺序为1的第一组数据中,用第1车轮射频天线组和第2车轮射频天线组的车轮识别数据分析出的车轮识别顺序均为epc1,优先顺序为1的第二组数据中,用第1车轮射频天线组和第2车轮射频天线组的车轮识别数据分析出的车轮识别顺序均为epc6,由此能够首先将epc1和epc6的数据进行合并,来确定epc1和epc6的轮序。
85.接着,对用第1车轮射频天线组和第2车轮射频天线组中的一个车轮射频天线组分析出了车轮识别顺序的情况下的数据进行合并。在图6的表中优先顺序为2的第一组数据中,用第1车轮射频天线组的车轮识别数据分析出的车轮识别顺序为epc2而用第2车轮射频天线组的车轮识别数据没有分析出车轮识别顺序,因此将该组数据合并来确定epc2的轮序。在优先顺序为2的第二组数据中,用第2车轮射频天线组的车轮识别数据分析出的车轮识别顺序为epc3而用第1车轮射频天线组的车轮识别数据没有分析出车轮识别顺序,因此将该组数据合并来确定epc3的轮序。
86.接着,对用第1车轮射频天线组和第2车轮射频天线组均没有采集到车轮识别数据的情况下的数据进行合并。在图6的表中优先顺序为3的一组数据中,用第1车轮射频天线组和第2车轮射频天线组的车轮识别数据均没有分析出车轮识别顺序,将其合并为空缺。
87.在优先顺序为2和3的数据中,用各车轮射频天线组的车轮识别数据均没有分析出车轮识别顺序的情况,例如可能是某车轮的射频标签掉落、损坏等原因而该车轮上没有可用的射频标签引起的。
88.最后,将用第1车轮射频天线组和第2车轮射频天线组各自的车轮识别数据分析出的车轮识别顺序不一致的数据进行合并。在图6的表中优先顺序为4的一组数据中,用第1车轮射频天线组的车轮识别数据分析出的车轮识别顺序为epc5,而第2车轮射频天线组的车轮识别数据分析出的车轮识别顺序为epc6。在优先顺序为1的第二组数据中已确定了epc6的车轮,因此判断为该组数据不是epc6的数据,将其合并而确定为epc5的数据。
89.对于第3车轮射频天线组和第4车轮射频天线组采集到的车轮识别数据,也通过上述顺序和方法进行数据合并,由此能够确定所有的车轮的轮序。
90.接着,在步骤s8中,结合步骤s7中所确定的最终确定轮序和对由图像采集装置202拍摄到的图像进行分析而得到的机车车辆100的型号信息以及端位信息,能够确定各车轮
的轮位,即确定机车车辆信息与车轮信息的匹配关系。图8中示出了6轴的机车车辆100的左侧各车轮的轮序与机车车辆100的首端先进入信息采集区域z时的轮位、以及尾端先进入信息采集区域z时的轮位的关系。对于机车车辆100的右侧各车轮也是相同的对应关系。
91.通过上述s1-s8的各步骤,能够在各个车轮匹配到各自的轮位的同时进行查漏补缺和相互校验,以获得准确的机车车辆信息与车轮信息的匹配关系。在此过程中,从数据的采集到数据的分析处理都能够由地面设备自动地完成而无需人工干预,所以能够节省大量的人力。
92.本发明的机车车辆与其车轮的匹配关系确定系统设置在机务段等场所,机车车辆在运行一段时间后需要进入机务段进行检测检修,因此,使用本发明的机车车辆与其车轮的匹配关系确定系统,能够在机车车辆正常进入机务段的同时获得准确的机车车辆信息与车轮信息的匹配关系。并且,由于所有的机车车辆都要在一段时间内进入机务段,所以只要在所有机务段都安装本发明的机车车辆与其车轮的匹配关系确定系统,就能够在较短的时间内对现有的所有机车车辆及其车轮进行匹配。
93.在准确地记录了机车车辆及其车轮的匹配关系的基础上,能够对机车车辆和车轮创建履历。通过创建机车车辆、特别是每个车轮的检测和使用履历,能够用来分析、统计数据而实现信息化,并能够基于分析数据和统计数据预测故障,实现智能化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1