盾构施工紧急制动方法、系统、控制器、介质、电瓶车与流程
1.本发明属于机动车辆制动技术领域,尤其涉及一种新型盾构施工电瓶车紧急制动方法、制动系统、制动控制器、计算机可读存储介质、新型盾构施工电瓶车。
背景技术:
2.盾构法是暗挖法施工中的一种全机械化施工方法,它是将盾构机械在地中推进,通过盾构外壳和管片支承四周围岩防止发生往隧道内的坍塌,同时在开挖面前方用切削装置进行土体开挖,通过出土机械运出洞外,靠千斤顶在后部加压顶进,并拼装预制混凝土管片,形成隧道结构的一种机械化施工方法。
3.盾构隧道施工法是指使用盾构机,一边控制开挖面及周围土体不发生坍塌失稳,一边进行隧道掘进、出渣,并在机内拼装管片形成衬砌、实施壁后注浆,从而不扰动周围土体而修筑隧道的方法。盾构机的所谓“盾”是指保持开挖面稳定性的刀盘和压力舱、支护周围土体的盾构钢壳,所谓“构”是指构成隧道衬砌的管片和壁后注浆体。
4.盾构法施工是一个非常复杂的工程过程,它对周围环境的影响与施工技术环节密切相关。早在1969年peck就指出盾构法施工引起的地层损失以及对相邻结构的影响与施工的具体细节是分不开的。因此,理论分析时只有准确把握盾构施工的主要因素才能得出符合实际情况的结果。
5.在盾构隧道施工过程中,不可避免的会遇到出现大坡度线路。在盾构机掘进过程中,盾构机配套的电瓶车需进行大坡度轨道的上下坡行驶,极易发生溜车现象,若发生溜车现象,将存在较大的安全隐患,作业风险极大。
6.通过上述分析,现有技术存在的问题及缺陷为:现有技术中,对于地铁隧道大坡度盾构施工中,不能有效防止电瓶车出现溜车情况。不能确保电瓶车运行安全,降低盾构施工的安全风险。
技术实现要素:
7.为克服相关技术中存在的问题,本发明公开实施例提供了一种新型盾构施工电瓶车紧急制动系统及制动方法。具体属于一种针对地铁盾构隧道掘进过程中电瓶车运行的新型紧急制动装置,尤其涉及一种针对防止电瓶车出现溜车的新型紧急制动装置。
8.所述技术方案如下:一种新型盾构施工电瓶车紧急制动方法,包括:
9.步骤一,制动检测器实施采集大坡度盾构隧道施工中的电瓶车运行状态;
10.步骤二,当电瓶车出现溜车,制动检测器将检测的异常信息发送报警器,进行报警;
11.步骤三,操作人员接收报警信息后,将制动信号通过制动按钮发送给制动控制器;
12.制动控制器接收制动信号后,启动气压制动阀,控制钢立柱自动降落装置的横向插销推出,钢立柱卡环从横向插销中脱出,钢立柱自动降落后卡住电瓶车轨道横向槽钢,实现电瓶车紧急制动。
13.在本发明一实施例中,所述步骤三制动控制器的制动方法包括:
14.步骤1,先将车辆气压制动阀插入气源,同时按下充气开关;此后车辆上整车控制器将向继电器输出高电平;此后电磁阀将带电打开;储气筒达到充气设定的最大标定压力;
15.步骤2,储气筒的气压都达到设定气压值后,将停止充气;当超过标定压力设定压力值后系统还未完成充气,控制器将判定未完成部分储气筒气路故障,并通过can报文发送该故障信息进入组合仪表显示屏进行显示,并在2秒后进入下一步检测;
16.步骤3,将溜车中不同位置电瓶车作为单质点模型,即智能体,则用节点i表示第i个智能体,其运动学方程:
[0017][0018]
式中:xi和vi分别为节点i的位移和速度;mi为节点i的质量;表示通过竖向钢立柱卡接的相邻电瓶车的制动力;制动力是关于相对位移的线性函数,l为竖向钢立柱的自由长度则可表示为其中k>0为制动系数; f
di
=miω0为电瓶车制动时所受到的阻力,其中ω0=c0+c1v+c2v2为单位基本阻力,主要包括摩擦阻力和空气阻力,c0,c1,c2是与电瓶车车型有关的常数;
[0019]
步骤4,选取第一节电瓶车为参考点,即溜车前初始状态,由运动方程得到系统偏差方程:
[0020][0021]
式中,a
ij
为邻接矩阵a=[a
ij
]n×n的元素,表示节点i和节点j间的耦合强度;对于矩阵a为拓扑图g中节点对构成的边的集合表征各智能体之间的邻接关系,描述多智能体之间信息交互拓扑结构;
[0022]
步骤5,设计一致性偏差跟踪控制律为:
[0023][0024]
式中,d
di
表示第i节电瓶车的位移信息与期望位移间的信息交换,d
vi
表示第 i节电瓶车的速度信息与期望速度间的信息交换,δi表示待设计的控制参数;为确保电瓶车的位移和速度能跟踪期望的运动状态,当节点i通过位移反馈控制被牵制时d
di
>0,否则d
di
=0;同样地,当节点i通过速度反馈控制被牵制时d
vi
>0,否则d
vi
=0;
[0025]
步骤6,对于控制输入为:
[0026][0027]
在本发明一实施例中,所述步骤2控制器将判定未完成部分储气筒气路故障方法
包括以下步骤:
[0028]
步骤1),控制器将向组合仪表发出can报文进行操作制动脚阀以及操作手制动阀的提醒,当提醒操作脚阀时,进行前后行车制动的检查;
[0029]
步骤2),对前行车制动检测:踩下脚阀后,控制器接收到脚制动开关低电平信号后,此后采集气压传感器的气压,当前左右制动气室均在标定压力内达到设定气压值时,控制器将判断前行车制动合格,否则则为不合格;
[0030]
步骤3),对后行车制动检测:踩下脚阀后,控制器接收到脚制动开关低电平信号后,此后采集气压传感器的气压,当后左右制动气室均在标定压力内达到设定气压值时,车控制器将判断前行车制动合格,否则则为不合格;
[0031]
步骤4),检测完毕后,进行驻车制动的检查,组合仪表提醒解除驻车,进行驻车气路检测;
[0032]
步骤5),整车控制器将间隔向继电器输出高电平,以分别打开电磁阀从而实现对车辆排辅、离合、变速箱取气的检测。
[0033]
在本发明一实施例中,所述步骤3过程为:
[0034]
(1)电瓶车在制动时,假设溜车中不同位置电瓶车间的竖向钢立柱处于自然状态,即相邻两节电瓶车的车间距x
(i,i+1)
=l,i=1,2,
…
n,则当系统达到平衡状态时对于第i节电瓶车的位置为:
[0035][0036]
其中,xr为期望的位移;
[0037]
(2)运动方程改写为:
[0038][0039]
(3)若系统达到平衡状态时溜车中不同位置电瓶车期望跟踪位移速度为且溜车中不同位置电瓶车的减速度为相邻两节电瓶车i和i+1间的车间距即为l,即:其中为平衡状态时的位置;此时系统的控制输入:
[0040][0041]
(4)将方程在平衡点处泰勒公式展开,则可得线性化的系统方程有:
[0042][0043]
(5)定义偏差
[0044]
在本发明一实施例中,
[0045]
所述步骤4过程包括:
[0046]
系统控制输入其中为确定项,为待设计项。
[0047]
对偏差方程变形:
[0048][0049]
在本发明一实施例中,所述新型盾构施工电瓶车紧急制动方法进一步包括对电瓶车电机的制动,具体包括:
[0050]
制动控制器接收到来自解码模块ad2s1210发送的激励信号exc和,经过耦合到定子绕组,对定子绕组输出进行与转子绕组角度相关的幅度调制,然后将调制好的波形发送到解码模块ad2s1210,经过处理后得到角度和速度的数字信号,发送给dsp再经过六路pwm波反馈给电瓶车电机,从而达到闭环控制。
[0051]
在本发明一实施例中,所述闭环控制包括:
[0052]
角度采集,首先通过程序初始化ad2s1210的gpio再选择a0、a1两个端口选择所传输的数据为角度信息,然后通过spi通信将角度数据发送给dsp,dsp的ad口接收到数据后将其换算成电角度值,并加上一定的偏移量,最后将其标1化参与双闭环计算;
[0053]
速度采集,速度信息利用ad2s1210采集,通过gpio初始化ad2s1210 后,选择a0、a1口功能为传输转速数据,然后通过spi将速度数据发送给dsp 的ad口,dsp接收到ad数据后换算为对应的速度值,最后将其标1化;
[0054]
在工作时,电瓶车电机转子转角θ发生变化,在磁场中产生磁通量的正弦和余弦分量;
[0055]
在φm磁通下,励磁绕组x1-x2产生的感应电动势为:
[0056]
n为定子绕组的匝数;k
w1
为定子绕组的基波系数;为直轴脉振磁通;
[0057]
励磁磁通在、正弦绕组y3-y4和余弦y1-y2中感应电势分别为:
[0058]
化简得:
[0059][0060]
制动控制器的变比:
[0061][0062]
若忽略励磁绕组的电阻和漏抗,则:
[0063]ef
=uf;
[0064]
即:
[0065]
所以励磁电压稳定转子的输出端电压与转子转角θ呈正余弦关系;
[0066]
若加入转子激励频率sinωt:
[0067][0068]
制动控制器采集转子位置和速度信息,将转子位置后,信息保存在输出电压波形的相位或幅值中,将这些波形解码来获得位置和转速信息;解码模块 ad2s1210接收到制动控制器的输出信号,再经过芯片的解码运算,最后通过接口电路将位置和转速信息输出给处理器,完成速度、位置反馈。
[0069]
本发明另一目的在于提供一种新型盾构施工电瓶车紧急制动系统包括:竖向钢立柱、竖向钢立柱外套、钢立柱卡环、带横向插销的钢立柱自动降落装置;
[0070]
所述竖向钢立柱套在竖向钢立柱外套内;
[0071]
竖向钢立柱上方连接有钢立柱卡环,该钢立柱卡环卡在带横向插销的钢立柱自动降落装置上。
[0072]
本发明另一目的在于提供一种制动控制器,所述制动控制器计包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行所述新型盾构施工电瓶车紧急制动方法。
[0073]
本发明另一目的在于提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行所述新型盾构施工电瓶车紧急制动方法。
[0074]
本发明另一目的在于提供一种新型盾构施工电瓶车,搭载所述的新型盾构施工电瓶车紧急制动系统。
[0075]
结合上述的所有技术方案,本发明所具备的优点及积极效果为:
[0076]
本发明通过由电瓶车司机控制电瓶车尾部增加的竖向钢柱,使竖向钢柱在电瓶车出现溜车情况下自动下落,通过钢立柱下落后卡住电瓶车轨道横向槽钢,实现电瓶车紧急制动。确保电瓶车运行安全,降低盾构施工的安全风险。
[0077]
相比于现有技术,本发明的优点进一步包括:
[0078]
本发明提供的制动方法制动检测器实施采集大坡度盾构隧道施工中的电瓶车运行状态;当电瓶车出现溜车,制动检测器将检测的异常信息发送报警器,进行报警;操作人员接收报警信息后,将制动信号通过制动按钮发送给制动控制器;制动控制器接收制动信号后,启动气压制动阀,控制钢立柱自动降落装置的横向插销推出,钢立柱卡环从横向插销中脱出,钢立柱自动降落后卡住电瓶车轨道横向槽钢,实现电瓶车紧急制动。制动控制器的制动方法包括:先将车辆气压制动阀插入气源,同时按下充气开关;此后车辆上整车控制器将向继电器1输出高电平;此后电磁阀1将带电打开;储气筒达到充气设定的最大标定压力;储气筒的气压都达到设定气压值后,将停止充气;当超过标定压力设定压力值后系统还未完成充气,控制器将判定未完成部分储气筒气路故障,并通过can报文发送该故障信息进入组合仪表显示屏进行显示,并在2秒后进入下一步检测;将溜车中不同位置电瓶车作为单质点模型,即智能体,则用节点i 表示第i个智能体;选取第一节电瓶车为参考点,即溜车前初始状态;设计一致性偏差跟踪控制律为:对于控制输入为:
[0079][0080]
通过上述技术方案实现了刹车的智能控制,从整体上看,本发明完全满足在恶劣环境中使用,尤其是在车用系统中。并且能实现对电瓶车速度的实时监控以及对电瓶车速度快慢的闭环控制。提前进行防止溜车的发生。
[0081]
旋变解码电路采用了正余弦并且通过ad2s1210对采集到的转子位置和转子速度进行分析解码,得到最后的波形图,对于电机转子速度和位置信息的检测精准度高。为后期的溜车现象进行辅助制动。
[0082]
当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明的公开。
附图说明
[0083]
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本公开的实施例,并与说明书一起用于解释本公开的原理。
[0084]
图1是本发明实施例提供的新型盾构施工电瓶车紧急制动系统及制动方法
[0085]
图2是本发明实施例提供的新型盾构施工电瓶车紧急制动系统示意图。
[0086]
图3是本发明实施例提供的钢立柱自动降落装置示意图。
[0087]
图2-图3中:1、竖向钢立柱;2、竖向钢立柱外套;3、钢立柱卡环;4、钢立柱自动降落装置(带横向插销)。
[0088]
图4是本发明实施例提供的正余弦制动控制器原理图。
[0089]
图中:a、制动控制器定子绕组结构示意图;b、制动控制器转子绕组结构示意图;c、磁通量φ在转子绕组y1y2和y3y4上的磁通分量.
[0090]
图5是本发明实施例提供的解码电路图。
[0091]
图6是发明实施例提供的激励信号和输出信号电路图。
具体实施方式
[0092]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
[0093]
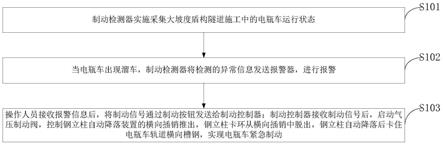
如图1所示,本发明提供一种新型盾构施工电瓶车紧急制动方法,包括:
[0094]
s101,制动检测器实施采集大坡度盾构隧道施工中的电瓶车运行状态;
[0095]
s102,当电瓶车出现溜车,制动检测器将检测的异常信息发送报警器,进行报警;
[0096]
s103,操作人员接收报警信息后,将制动信号通过制动按钮发送给制动控制器;制动控制器接收制动信号后,启动气压制动阀,控制钢立柱自动降落装置的横向插销推出,钢立柱卡环从横向插销中脱出,钢立柱自动降落后卡住电瓶车轨道横向槽钢,实现电瓶车紧急制动。
[0097]
在本发明一优选实施例中,所述步骤s103制动控制器的制动方法包括:
[0098]
步骤1,先将车辆气压制动阀插入气源,同时按下充气开关;此后车辆上整车控制器将向继电器输出高电平;此后电磁阀将带电打开;储气筒达到充气设定的最大标定压力;
[0099]
步骤2,储气筒的气压都达到设定气压值后,将停止充气;当超过标定压力设定压力值后系统还未完成充气,控制器将判定未完成部分储气筒气路故障,并通过can报文发送该故障信息进入组合仪表显示屏进行显示,并在2秒后进入下一步检测;
[0100]
步骤3,将溜车中不同位置电瓶车作为单质点模型,即智能体,则用节点i表示第i个智能体,其运动学方程:
[0101][0102]
式中:xi和vi分别为节点i的位移和速度;mi为节点i的质量;表示通过竖向钢立柱卡接的相邻电瓶车的制动力;制动力是关于相对位移的线性函数,l为竖向钢立柱的自由长度则可表示为,其中k>0为制动系数; f
di
=miω0为电瓶车制动时所受到的阻力,其中ω0=c0+c1v+c2v2为单位基本阻力,主要包括摩擦阻力和空气阻力,c0,c1,c2是与电瓶车车型有关的常数;
[0103]
步骤4,选取第一节电瓶车为参考点,即溜车前初始状态,由运动方程得到系统偏差方程:
[0104][0105]
式中,a
ij
为邻接矩阵a=[a
ij
]n×n的元素,表示节点i和节点j间的耦合强度;对于矩阵a为拓扑图g中节点对构成的边的集合表征各智能体之间的邻接关系,描述多智能体之间信息交互拓扑结构;
[0106]
步骤5,设计一致性偏差跟踪控制律为:
[0107][0108]
式中,d
di
表示第i节电瓶车的位移信息与期望位移间的信息交换,d
vi
表示第 i节电瓶车的速度信息与期望速度间的信息交换,δi表示待设计的控制参数;为确保电瓶车的位移和速度能跟踪期望的运动状态,当节点i通过位移反馈控制被牵制时d
di
>0,否则d
di
=0;同样地,当节点i通过速度反馈控制被牵制时d
vi
>0,否则d
vi
=0;
[0109]
步骤6,对于控制输入为:
[0110][0111]
在本发明一优选实施例中,所述步骤2控制器将判定未完成部分储气筒气路故障方法包括以下步骤:
[0112]
步骤1),控制器将向组合仪表发出can报文进行操作制动脚阀以及操作手制动阀的提醒,当提醒操作脚阀时,进行前后行车制动的检查;
[0113]
步骤2),对前行车制动检测:踩下脚阀后,控制器接收到脚制动开关低电平信号后,此后采集气压传感器的气压,当前左右制动气室均在标定压力内达到设定气压值时,控制器将判断前行车制动合格,否则则为不合格;
[0114]
步骤3),对后行车制动检测:踩下脚阀后,控制器接收到脚制动开关低电平信号后,此后采集气压传感器的气压,当后左右制动气室均在标定压力内达到设定气压值时,车控制器将判断前行车制动合格,否则则为不合格;
[0115]
步骤4),检测完毕后,进行驻车制动的检查,组合仪表提醒解除驻车,进行驻车气路检测;
[0116]
步骤5),整车控制器将间隔向继电器输出高电平,以分别打开电磁阀从而实现对车辆排辅、离合、变速箱取气的检测。
[0117]
在本发明一优选实施例中,所述步骤3过程为:
[0118]
(1)电瓶车在制动时,假设溜车中不同位置电瓶车间的竖向钢立柱处于自然状态,即相邻两节电瓶车的车间距x
(i,i+1)
=l,i=1,2,
…
n,则当系统达到平衡状态时对于第i节电瓶车的位置为:
[0119][0120]
其中,xr为期望的位移;
[0121]
(2)运动方程改写为:
[0122][0123]
(3)若系统达到平衡状态时溜车中不同位置电瓶车期望跟踪位移速度为且溜车中不同位置电瓶车的减速度为相邻两节电瓶车i和i+1间的车间距即为l,即:其中为平衡状态时的位置;此时系统的控制输入:
[0124][0125]
(4)将方程在平衡点处泰勒公式展开,则可得线性化的系统方程有:
[0126][0127]
(5)定义偏差
[0128]
在本发明一优选实施例中,所述步骤4过程包括:
[0129]
系统控制输入,其中为确定项,为待设计项。
[0130]
对偏差方程变形:
[0131][0132]
下面结合具体实施例对本发明的技术方案作进一步描述。
[0133]
实施例1
[0134]
如图2-图3所示,新型盾构施工电瓶车紧急制动系统包括:竖向钢立柱1、竖向钢立柱外套2、钢立柱卡环3、钢立柱自动降落装置(带横向插销)4。
[0135]
在电瓶车尾部增加一个竖向钢立柱1,在图2中,在电瓶车正常行驶过程中,竖向钢立柱1外套在一个方形竖向钢立柱外套2内。在图2中,在竖向钢立柱1 上方有一个钢立柱卡环3,该钢立柱卡环3卡在钢立柱自动降落装置(带横向插销)4上,当电瓶车出现溜车情况时,通过控制钢立柱自动降落装置(带横向插销)4将横向插销推出,钢立柱卡环3从横向插销中脱出,使竖向钢立柱1自动降落,进而使竖向钢立柱1卡在轨道横向槽钢上,达到紧急制动的目的。
[0136]
实施例2
[0137]
本发明新型盾构施工电瓶车紧急制动方法进一步包括对电瓶车电机的制动,具体包括:
[0138]
制动控制器接收到来自解码模块ad2s1210发送的激励信号exc和 (如图6),经过耦合到定子绕组,对定子绕组输出进行与转子绕组角度相关的幅度调制,然后将调制好的波形发送到解码模块ad2s1210,经过处理后得到角度和速度的数字信号,发送给dsp再经过六路pwm波反馈给电瓶车电机,从而达到闭环控制。如图4所示。
[0139]
在本发明中,所述闭环控制包括:
[0140]
角度采集,首先通过程序初始化ad2s1210(如图5所示)的gpio再选择 a0、a1两个端口选择所传输的数据为角度信息,然后通过spi通信将角度数据发送给dsp,dsp的ad口接收到数据后将其换算成电角度值,并加上一定的偏移量,最后将其标1化参与双闭环计算;
[0141]
速度采集,速度信息利用ad2s1210采集,通过gpio初始化ad2s1210 后,选择a0、a1口功能为传输转速数据,然后通过spi将速度数据发送给dsp 的ad口,dsp接收到ad数据后换算为对应的速度值,最后将其标1化;
[0142]
在工作时,电瓶车电机转子转角θ发生变化,在磁场中产生磁通量的正弦和余弦分量;
[0143]
在φm磁通下,励磁绕组x1-x2产生的感应电动势为:
[0144]
n为定子绕组的匝数;k
w1
为定子绕组的基波系数;为直轴脉振磁通;
[0145]
励磁磁通在、正弦绕组y3-y4和余弦y1-y2中感应电势分别为:
[0146]
化简得:
[0147][0148]
制动控制器的变比:
[0149][0150]
若忽略励磁绕组的电阻和漏抗,则:
[0151]ef
=uf;
[0152]
即:
[0153]
所以励磁电压稳定转子的输出端电压与转子转角θ呈正余弦关系;
[0154]
若加入转子激励频率sinωt:
[0155][0156]
制动控制器采集转子位置和速度信息,将转子位置后,信息保存在输出电压波形的相位或幅值中,将这些波形解码来获得位置和转速信息;解码模块 ad2s1210接收到制动控制器的输出信号,再经过芯片的解码运算,最后通过接口电路将位置和转速信息输出给处理器,完成速度、位置反馈。
[0157]
本发明制动控制器对工作环境条件要求低、防灰尘性能好,并且耐热性能好;同时可以运行在更高转速的电机上,制动控制器旋转一圈产出一个正余弦波,方便观察。
[0158]
本发明电瓶车电机内部有初级绕组和次级绕组,初级绕组固定在电机转轴上,次级绕组是一组正交的绕组,一个是输出正弦信号,一个是输出余弦信号,通过一个次级绕组获取信号大小,另一个获取旋转方向,两个配合使用确保正确采集位置和转速信息。
[0159]
为了直观的观察和测量,制动控制器选用正余弦制动控制器;正余弦制动控制器定子上有两套匝数,型式完全相同的绕组,绕组的空间位置相差90
°
,一个作为励磁绕组x1-x2,一个则为交轴绕组x3-x4。
[0160]
在转子也有两套匝数,型式完全相同的绕组,绕组的空间位置相差90
°
,一个作为正弦输出绕组y1-y2,一个则为余弦输出绕组y3-y4。
[0161]
ad2s1210是一款10位至16位分辨率旋变数字转换器,集成片上可编程正弦波振荡器,为旋变器提供正弦波激励,用户可以在转换器的正弦和余弦输入端输入3.15vp-p
±
27%,频率为2khz至20khz范围内的信号。
[0162]
ad2s1210的引脚列表如表1所示:
[0163][0164]
工作配置:
[0165]
(1)采用16位精度,将res0和res1分别置为1,位置lsb(弧分)为 0.3,速度lsb(rps)为0.004。
[0166]
(2)模式选择,将a0始终置为0,a1通过htcp-0601分别输出1,0高低电平,从而达到两种模式位置输出和速度输出的切换(a0:a1=0:0;位置输出, a0:a1=0:1;速度输出)。
[0167]
(3)输入信号,输入激励频率为10khz,在exc和加上一个电容和电阻并联的低通滤波器,以分别滤除exc和的高频噪声,得到优质的激励信号,然后通过推挽电路提高激励信号的电流驱动能力。
[0168]
(4)输出信号,通过41,42,44,45引脚来检测正、余弦反馈型号。
[0169]
本发明输入制动控制器的exc激励信号,激励信号是频率为10khz的正弦信号。输出端检测的正、余弦波形图,二者的频率也为10khz,sin信号和cos 信号的相位相差90度。
[0170]
制动控制器超调量较小,并且切换电机旋转方向后能迅速稳定。能够很好的采集电机实施转速和位置信息,精度高、响应速度快、采集误差满足系统要求,使电机控制系统平稳运行,达到了预期的效果。
[0171]
下面结合积极效果对本发明技术方案作进一步描述。
[0172]
在本发明中,该制动装置能够保证在大坡度盾构隧道施工中的电瓶车不发生溜车现象,实现紧急制动,确保电瓶车运行安全。该装置通过在电瓶车尾部增加一个竖向钢立柱,增加的竖向钢立柱具有自动降落功能,该钢立柱是否降落由电瓶车驾驶室控制。在电瓶车运行过程中,一旦出现溜车现象,电瓶车司机可以控制立即降落该钢立柱,钢立柱自动降落后即可卡住电瓶车轨道横向槽钢,实现电瓶车紧急制动。
[0173]
本领域技术人员在考虑说明书及实践这里公开的公开后,将容易想到本公开的其它实施方案。本技术旨在涵盖本公开的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本公开的一般性原理并包括本公开未公开的本技术领域中的公知常识
或惯用技术手段。说明书和实施例仅被视为示例性的,本公开的真正范围和精神由所附的权利要求指出。
[0174]
应当理解的是,本公开并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本公开的范围应由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1