用于自动驾驶机动车辆的汽车电子横向动力学控制系统的制作方法
用于自动驾驶机动车辆的汽车电子横向动力学控制系统
1.相关申请的交叉引用
2.本专利申请主张在2018年12月27日所提交的意大利专利申请号no.102018000021244的优先权,其全部内容通过引用包含于此。
技术领域
3.本发明总体上涉及一种用于自主机动车辆的汽车电子主动安全系统,特别是涉及一种用于自主机动车辆的汽车电子横向动力学控制系统。
4.本发明适用于任何类型的道路机动车辆,无论是用于运输人员的道路机动车辆,例如轿车、公共汽车、露营车等,还是用于运输货物的道路机动车辆,例如工业车辆或轻型或中重型商用车(厢式货车、蓬式货车、厢式陆地巡洋舰等)。
背景技术:
5.众所周知,近年来汽车制造商已投入大量资源研究汽车高级驾驶员辅助系统(adas),以提高驾驶安全性和舒适性。出于该原因,并且由于其将有助于实现欧盟设定的减少道路事故的目标,adas是汽车行业中增长最快的细分市场之一,并且在未来几年必将变得越来越受欢迎。
6.adas安全功能旨在通过提供警告驾驶员潜在问题的技术来避免碰撞和事故,或者通过实施防护措施和控制机动车辆来避免碰撞。自适应功能可以自动照明、提供自适应巡航控制、自动制动、结合gps/交通信号、连接智能手机、提醒其他机动车辆的驾驶员注意危险、让驾驶员保持在正确的车道上或显示盲点。
7.adas技术基于视觉/相机系统、传感系统、汽车数据网络、车对车(v2v)或车对基础设施(v2i)通信系统。下一代adas系统将越来越多地利用无线连接为v2v或v2i通信提供附加值。
8.根据德国保险商协会(gdv)事故调查的研究显示,事实上,仅车道偏离警示系统就可以预防高达15%的道路交通事故,而十字路口的辅助可以避免高达35%的道路事故。
9.诸如雷达和相机集成,以及来自多个应用的传感数据的数据融合等的技术发展预计将在未来20年给机动车辆带来比自第一辆机动车辆生产以来的130年中发生的变化更为显著的变化。
10.这些技术发展的终点通常被定义为自动驾驶、无人驾驶或自主机动车辆。这些术语最常互换使用,如在本讨论中,而在某些专业环境中,这些术语的使用有所不同,以进行细微的区分。
11.特别是,术语“自主机动车辆”用于表示与现今机动车辆类似的机动车辆,即具有朝前的座椅和方向盘,其中驾驶员仅在某些情况下被剥夺驾驶任务,例如自动停车或自动制动时,或自适应巡航控制以调整速度以便与前方车辆保持安全距离时。在不久的将来,自主机动车辆可以完全控制交通繁忙时或高速公路上的驾驶。
12.术语“自动驾驶或无人驾驶机动车辆”已被用来表示那些被认为相比自主机动车
辆代表着向前迈进了一步的机动车辆,即方向盘将完全消失的机动车辆,其将使用与自主机动车辆所使用的相同的传感系统完成整个行驶过程。
13.忽略这种微妙的区别,真正的区别在于辅助驾驶汽车与自动或自动化驾驶机动车辆之间,在辅助驾驶汽车中,机动车辆通过以下方式“辅助”驾驶员(因此驾驶员未免除注意):如果机动车辆前制动则制动车辆、在需要时减速车辆等等,在自动或自动化驾驶机动车辆中,与先前的汽车不同,机动车辆完全自动驾驶而无需驾驶员注意。
14.伍德(wood)等人(2012)的文章给出了这种术语区别的一个例子,其中作者写道:“本文通常使用术语
‘
自主’(autonomous)而不是术语
‘
自动化’(automated)。选择
‘
自主’一词是
‘
因为它是目前使用更广泛的术语(因此公众更熟悉)。然而,术语
‘
自动化’可以说是更准确的,因为它意味着由机器控制或操作,而
‘
自主’则意味着单独或独立运作。目前,大多数车辆(车辆不知道座位上有人)使用与云或其他车辆的通信,并且不会独立进入目的地。这就是为什么术语
‘
自动化’更适合描述这种车辆概念”。
15.2014年,国际sae(汽车工程师学会)是航空航天、汽车和运载工具行业的标准化机构,致力于开发和规定各种装有发动机的运载工具的工程标准,包括轿车、卡车、船舶和飞行器,其发布了新的国际标准j3016,为自动驾驶规定了六个不同的级别。这种分类是基于驾驶员对机动车辆的干预程度,而不是基于机动车辆的能力。
16.自动驾驶的六个级别是:
17.级别0—无自主性:驾驶员必须负责所有驾驶方面,没有电子支持;
18.级别1—驾驶员辅助:驾驶员必须负责所有驾驶方面,但得到电子系统提供的信息(以视觉或听觉警报的形式)的支持,该电子系统可以发出信号以警示危险情况或不利条件。在此级别,汽车只是分析和表示情况;因此,驾驶员对驾驶车辆负有全责;
19.级别2—部分自动化:驾驶员负责驾驶,但有第一驾驶集成。在此级别,机动车辆通过安全系统干预加速和制动,例如制动辅助和防撞紧急制动。方向和交通控制仍由驾驶员控制,尽管在道路标记清晰可见的某些情况下,可以以部分自动化的方式(称为车道保持辅助系统,取决于汽车品牌,其最完整的名称为交通堵塞辅助、自动转向、公路辅助系统);
20.级别3—条件自动化:机动车辆能够在普通环境条件下管理驾驶,管理加速、制动和方向,而驾驶员在如出现系统请求或驾驶员本人验证不利情况的有问题的情况下进行干预;
21.级别4—高度自动化:自动驾驶系统能够应对任何可能发生的情况,但不得在极端驾驶条件下(如恶劣天气情况下)激活;
22.级别5—完全自动化:自动驾驶系统能够管理所有可以由人类管理的情况,无需任何人工干预。
23.在对这些新技术进行分类的背景下,联合国欧洲经济委员会(un/ece)也采取了行动,出台了法规no.79de/ece/324/rev.1/add.78/rev.3
‑
e/ece/trans/505/rev.1/add.78/rev.3,题为“agreement concerning the adoption of harmonized technical united nations regulations for wheeled vehicles,equipment and parts which can be fitted and/or be used on wheeled vehicles and the conditions for reciprocal recognition of approvals granted on the basis of these united nations regulations”(关于通过轮式车辆、可安装和/或用于轮式车辆的设备和部件的联合国统一
技术条例的协议以及相互承认根据本联合国条例所授予的批准的条件),其在2017年11月30日的增编第78号法令使用与sae不同的命名法,制定了关于道路车辆转向系统的配置和操作的统一规定。
24.事实上,到目前为止,对转向系统的主要要求一直是转向控制(通常由方向盘组成)和车轮之间存在正机械连接,以确定车辆的路径。大型机械连接被认为不会发生故障。
25.技术进步、通过消除机械转向柱来提高乘员安全性的愿望、以及与更容易在左侧驾驶和右侧驾驶车辆之间转移转向控制相关的生产优势,带来了对传统方法的审视。因此,考虑到新技术,对法规进行了修订,从现在开始,在转向系统中转向控制和机动车辆的车轮之间将可能没有机械连接。
26.驾驶员保留对机动车辆的主要控制但可以通过在机动车辆上产生的影响转向系统的信号进行辅助的系统被称为“高级驾驶员辅助转向系统”。
27.这种系统可能包含例如“自动指令转向功能”,该功能使用被动的基础设施元件帮助驾驶员将机动车辆保持在理想路径上(车道引导、车道保持、航向控制)、在狭窄空间内执行低速机动、或将机动车辆停在预定点(公共汽车站点引导)。
28.高级驾驶员辅助转向系统还可以包括“校正转向功能”,例如,当车辆离开车道时向驾驶员发出警报(“车道偏离警报”),校正转向角度以防止车辆离开车道(“车道偏离避免”),或校正一个或多个车轮的转向角度以改善机动车辆的动态行为或稳定性。
29.借助任何高级驾驶员辅助转向系统,驾驶员可以随时决定有意关闭辅助功能,例如以避开道路上的障碍物。
30.这项技术还可以通过传感器和机动车辆上或机动车辆外部的元件产生的信号来影响或控制转向、引擎和制动系统,例如由沿道路放置的应答器或插入路面的有源元件传输的信号。这些不需要在车上存在驾驶员的系统被称为“自主转向系统”。
31.us2005/246101a1公开了一种用于道路车辆的汽车稳定性控制系统,包括限制管理辅助控制器,该控制器使用视频检测车道测量,结合车辆动力学信息。这些包括惯性制动器和转向测量,以控制eps和vsc汽车系统,从而辅助驾驶员稳定机动车辆并在转向不足、过度转向、不对称或分裂摩擦(split mu friction)、以及重型制动条件和车道变化的情况下之前和/或期间校正任何车道偏离。
32.us2006/100766a1公开了一种提高机动车辆制动时行驶稳定性的方法,根据不同的输入参数计算被调整和/或被控制的转向系统的补偿转向角度,从而通过转向干预提高机动车辆的行驶稳定性。在转向干预期间,考虑至少两个用于补偿转向角度的干涉补偿部分,以实现更舒适的控制;基于机动车辆的路径计算干涉补偿部分之一。
33.us2011/098886a1公开了一种基于具有抽象性和模块性的自顶向下方法设计的机动车辆控制架构。该控制架构包括:车辆/环境检测与感知处理器,其处理来自传感器的信号;和运动规划处理器,运动规划处理器提供车道中心路径规划与跟踪、车道变换路径规划与跟踪、以及目标与往返速度控制。该架构还包括解释驾驶员控制的驾驶员控制解释器和为车辆的横向、侧倾和纵向动力提供参考动力的控制集成处理器。该架构还包括监督与控制集成控制器,该控制器提供控制集成并产生纵向机动车辆控制器和横向机动车辆控制器使用的集成的纵向力控制信号、集成的横向力控制信号、集成的横摆力矩控制信号和转向扭矩控制信号。
技术实现要素:
34.本发明的目的是提供一种自主自动驾驶机动车辆的汽车电子横向动力学控制系统。
35.根据本发明,如所附权利要求中所述,提供了一种自主自动驾驶机动车辆的汽车电子横向动力学控制系统。
附图说明
36.图1示出了根据本发明第一实施例的用于控制自主自动驾驶机动车辆的行驶稳定性的汽车高级电子系统的高级别架构框图。
37.图2示出了图1所示的汽车高级电子控制系统的详细框图。
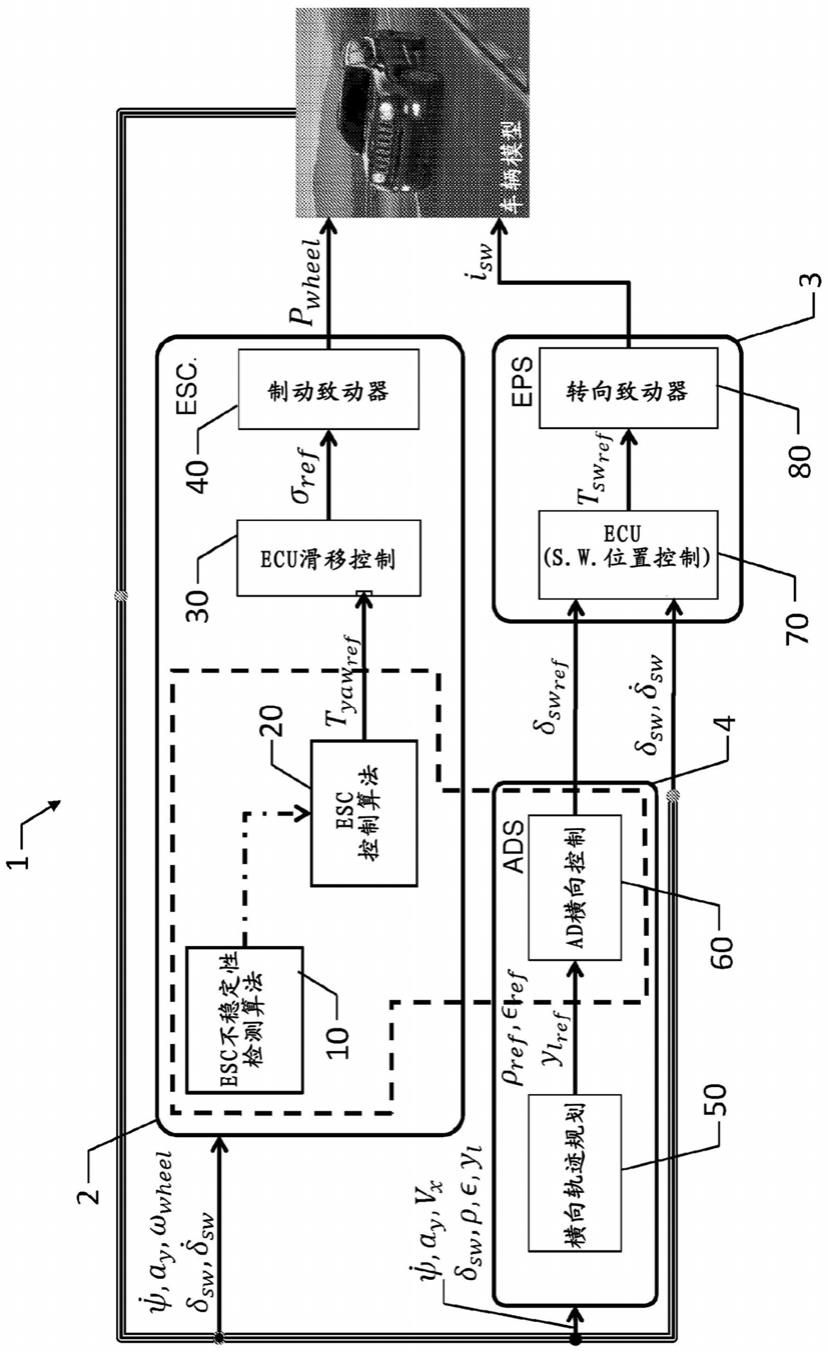
38.图3示出了根据本发明第二实施例的用于控制自主自动驾驶机动车辆的行驶稳定性的汽车高级电子系统的高级别架构框图。
39.图4显示了图3所示的汽车高级电子控制系统的详细框图。
具体实施方式
40.现参考附图详细描述本发明,以允许本领域技术人员产生和使用本发明。对所描述的实施例的各种修改对于本领域技术人员来说将是显而易见的,并且在不脱离所附权利要求书中限定的本发明的保护范围的情况下,在此描述的一般原理可以应用于其他实施例和应用。因此,本发明不应被视为局限于所描述和所示出的实施例;相反,其应该被授予与所描述和要求保护的特征一致的最广泛的保护范围。
41.简而言之,本发明本质上用于协调汽车电子转向控制系统的操作(为简洁起见以下称为eps(电动助力转向)系统)提供了汽车电子驾驶稳定性控制系统的操作(为简洁起见以下称为esc(电子稳定控制)系统),使esc和eps系统协同合作,以创建一个用于控制自主机动车辆的横向动力学的集成汽车电子控制系统,其中eps系统的干预考虑了esc系统对机动车辆的干预。
42.众所周知,事实上,用于手动驾驶机动车辆的esc系统被设计为检测机动车辆行驶不稳定状况的发生,并且在检测到时计算将要施加到机动车辆以防止机动车辆的行驶不稳定性的横摆扭矩并相应地控制汽车制动系统使横摆扭矩施加到机动车辆以防止机动车辆的行驶不稳定性。
43.自主或手动驾驶机动车辆的eps系统被设计为接收如下形式的对汽车转向系统的转向指令:机动车辆的车轮或转向柱必须遵循的转向角度或者待施加到机动车辆的转向柱以使机动车辆遵循规划的横向行驶路径的转向扭矩并根据转向指令相应地控制汽车转向系统,使转向角度或转向扭矩施加到机动车辆的车轮或转向柱以使机动车辆按规划的横向行驶路径行驶。
44.在图1和图2所示的第一实施例中,esc和eps系统的干预是协调的,不改变esc系统的逻辑架构,而仅作用于eps系统的逻辑架构,从而导致eps系统的干预考虑了esc系统的干预,因此基本上体现了esc系统的增量改进。
45.在本发明的第二个更高级的实施例中,如图3和图4所示,通过改变esc系统和eps
系统两者的逻辑架构来协调esc系统和eps系统的干预,从而体现对其逻辑架构的重新思考。
46.参考本发明的第一实施例,图1示出了用于控制自主机动车辆的横向动力学的集成汽车电子控制系统的框图,其整体用附图标记1表示。特别地,图1示出了从架构的角度来看的esc系统的域,其用附图标记2来表示,eps系统的域,用附图标记3来表示,以及自主驾驶系统的域,为简洁起见以下称为ads并用附图标记4来表示,ads被设计用于计算eps系统3的参考转向角度
47.如图1所示,esc系统2接收通过汽车传感系统测得的或基于测得的量以其他方式计算的一系列汽车量,以下为方便起见均称为测得的汽车量。测得的汽车量包括,尤其是,横摆率横向加速度a
y
、车轮角速度ω
wheel
、转向角度δ
sw
和转向速度等。
48.基于接收到的测得的汽车量,esc系统2被设计为计算制动压力p
wheel
形式的对汽车制动系统的制动指令,该制动压力p
wheel
将要施加到制动卡钳以引起相应的待施加到自主机动车辆的横摆扭矩
49.ads系统4接收测得的汽车量a
y
、v
x
、δ
sw
、ρ、∈、y
l
,其中∈是机动车辆相对于机动车辆纵向轴线的航向,ρ是机动车辆前方的道路曲率,y
l
是机动车辆相对于机动车辆规划行驶路径的横向位置,其中后三个测得的汽车量共同限定机动车辆在机动车辆的参考系中的位置,并且v
x
是基于ω
wheel
计算的机动车辆的纵向速度。
50.基于接收到的测得的汽车量,adas系统4计算eps系统3的转向角度以使自主机动车辆遵循规划的横向行驶路径。
51.eps系统3接收计算的参考转向角度测得的转向角度δ
sw
和测得的转向速度并且基于这些汽车量,eps系统3计算电流i
sw
形式的对汽车转向系统的转向指令,该电流i
sw
将要提供给汽车转向系统的电致动器从而使转向扭矩施加到自主机动车辆的转向柱上,从而使后者实现相应的转向角度继而导致自主机动车辆遵循规划的横向行驶路径。
52.特别是,esc系统2被设计为:
53.‑
基于a
y
、δ
sw
、检测自主机动车辆不稳定状况的发生(框10),
54.‑
当检测到自主机动车辆的不稳定状况发生时,计算待施加到自主机动车辆并且如下所述将被遵循的横摆扭矩(框20),
55.‑
计算自主机动车辆的车轮必须施加在地面上的纵向力和相关联的目标车轮旋转σ
ref
(框30),并且
56.‑
计算制动压力p
wheel
并向各个车轮施加制动压力p
wheel
以实现相关的σ
ref
(框40)。
57.ads系统4被设计为:
58.‑
基于a
y
、v
x
、δ
sw
、ρ、∈、y
l
,计算自主机动车辆要遵循的并且由多个汽车量限定的规划横向行驶路径,其中的多个汽车量包括参考曲率ρ
ref
、参考航向∈
ref
和参考横向位置(框50),
59.‑
基于限定自主机动车辆的规划行驶路径的汽车量来计算转向角度(框60)。
60.特别是,在自主机动车辆中,规划横向行驶路径由横向行驶路径规划器计算,该横向行驶路径规划器是自主机动车辆的自主驾驶系统的一部分,并基于专有的横向行驶路径规划算法进行操作,该算法具体是由汽车制造商开发,因此不同的汽车制造商的算法通常是不同的。
61.eps系统3被设计为:
62.‑
基于转向角度计算要施加到自主机动车辆的转向柱以实现该转向角度的转向扭矩(框70)。
63.‑
计算并向汽车转向系统提供电流i
sw
形式的转向指令,该电流i
sw
是执行计算出的转向指令所需要的。
64.图2示出了图1所示的本发明第一实施例虚线区域内的功能框的详细功能框图,并且其中的框被认为仅表示所执行的功能而不限于特定电路结构。
65.特别地,如上所述,esc系统2被设计为:
66.‑
接收a
y
、ω
wheel
、δ
sw
、
67.‑
基于接收到的汽车量,检测自主机动车辆不稳定状况的发生,以及
68.‑
当检测到自主机动车辆出现不稳定状况时,基于接收到的汽车量计算
69.转向角度计算框60包括:
70.‑
状态观测器61,其方便地为时变状态观测器,被配置为接收ρ、∈、y
l
、v
x
和或可替代地,δ
sw
,并输出观测到的汽车量其中是自主机动车辆的横向速度,这些观测到的汽车量可以通过过滤对应的测得的汽车量来计算,也可以根据其他测得的汽车量进行估计,从而也可以相互定相,即相关并且彼此一致,
71.‑
横摆率参考生成器62,其被配置为接收ρ
ref e v
x
并基于ρ
ref
,e v
x
和文献中已知的模型计算并输出参考横摆率其中最简单的由ρ
ref
和v
x
的乘积表示,
72.‑
第一减法器63,其被配置为接收和并相减,从而输出横摆率误差
73.‑
第二减法器64,其被配置为接收∈
ref e和e并相减,从而输出自主机动车辆的相关航向和横向位置误差∈
err e
74.‑
状态反馈控制器65,其被配置为接收∈
err
、并基于∈
err
、和文献中已知的状态模型计算并输出对转向角度的闭环贡献其中最简单的由将∈
err
、进行线性组合的适当的增益向量表示;
75.‑
开环控制器66,其被配置为接收ρ
ref
和v
x
,并基于ρ
ref
和v
x
以及在文献中已知的模型之一计算和输出对转向角度均开环或前馈贡献以加快控制逻辑的时间响应和提高ρ的补偿能力,和
76.‑
求和单元67,其被配置为接收和并对和求和,从而输出
77.参考本发明的第二实施例,图3从架构的角度示出了esc系统2、eps系统3和ads系统4的域。
78.图1和图3所示架构之间的比较表明,本发明的第二实施例与图1所示的第一实施例的不同之处在于横摆扭矩和转向角度不是分别在esc系统2和ads系统4中单独计算,而是均在esc系统2中计算(框70),esc系统2成为自主机动车辆的制动系统和转向系统两者的控制器。
79.另外,在本发明的第二实施例中,esc系统2接收a
y
、ω
wheel
、δ
sw
、ρ、∈、y
l
,而ads系统4接收a
y
、v
x
、δ
sw
、ρ、∈、y
l
。
80.因此,图2所示的本发明第一实施例的逻辑架构转变为图4所示的逻辑架构,其中状态反馈控制器65集成了框10和框20的功能。
81.如图4所示,状态反馈控制器65被设计为除了∈
err
、之外,还接收δ
sw
、a
y
、v
x
以检测自主机动车辆不稳定状况的发生,当检测到这种情况时,计算横摆扭矩该扭矩也输入到状态观测器61以允许其计算
82.在该实施例中,状态反馈控制器65可以方便地是时变的,并且为此需要接收v
x
,状态反馈控制器65被设计为计算和输出:
83.‑
基于根据是否检测到自主机动车辆不稳定状况的发生而在两个不同增益向量和之间选择的增益矩阵,以及
84.‑
基于根据是否检测到自主机动车辆的不稳定状况的发生而在两个不同增益向量和之间选择的增益矩阵。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1