一种双驱式电动滩涂车
1.本实用新型涉及滩涂车辆技术领域,具体涉及一种双驱式电动滩涂车。
背景技术:
2.地球上大约50%的地域是常规车辆无法工作的,如沙漠、滩涂、沼泽、戈壁和雪原等,在这些地域,现有常规地面车辆由于严重的下陷、打滑和粘土,车辆行驶时驱动附着力小,行驶阻力却很大,因而存在通过性差、效率低、能耗大甚至无法行驶的问题。上述地域,尤其是含水量饱和、超饱和的滩涂地带,土壤层承载能力低、抗剪强度小,成为现有车辆无法逾越的禁区,甚至连人也举步维艰。诸多限制给依靠滩涂养殖农户的日常作业带来了极大的不便。
3.我国拥有1.8万公里的海岸线,很多沿海区域因为得天独厚的自然环境适合发展海产养殖业和种植业,海产养殖和种植通常会伴随着涨潮和落潮的周期性变化而选取作业时间,农民一般选择落潮后进行投苗、种植和收获农产品。由于海洋环境的瞬息万变,作业人员有时会因涨潮太快而不能迅速撤离,使得滩涂作业人存在一定的安全隐患。沿海滩涂地区多为深松软地面,普通车辆无法正常行驶,大部分时间是农民利用简单的农具进行繁重的作业,采集到的农产品也存在无法快速运出而不能很好保鲜的问题,迫切需要一种不仅能够实现水路两栖行驶,而且在深松软路面具有很好承载特性,同时可以快速、安全行驶和作业的滩涂车辆。
4.履带车辆的发展可追溯到1770年,由英国的理查德
·
洛弗尔
·
埃奇沃思实用新型,并获得了专利。当时履带车辆被描述为“便携式轨迹”或是“人造路”,这种便携式轨道是由多块木头制造而成,沿着与其相配的车架移动,类似于在车轮前面铺了无限长的轨道一样,这就是全履带车辆的最初构想。19世纪一大批实用新型家投身到全履带车辆的实用新型创造中来,并且申请了大量的专利。这期间尽管有大量的实用新型创造,但依现在来看履带车辆并没有得到发展,技术还十分的落后,驱动力不能满足动力的需求,操纵转向的设计非常不合理,可利用的履带材料仅仅是木材和铸铁,性能远远满足不了履带车辆的要求。
5.由于内燃机的实用新型并且随着第一辆汽车的诞生,在十九世纪末这一状况得以迅速地改变。1901年第一辆半履带蒸汽机车问世,随后客车和履带车辆发生了革命性的变化,一战前期农用拖拉机开始生产并得到广泛使用。这一时期由于土壤与车辆之间的理论研究十分不足,致使履带车辆的使用很有限。一战后期,战场上出现了第一辆坦克,它在战场上的所向披靡推动了履带车辆与它所处环境之间的研究。一战后,在战争中广泛使用的履带车辆技术被转化为民用,主要应用在农业领域。农业拖拉机的技术水平得到了显著提高,它是紧跟机动车辆的发展而进步的。这个时期履带式车辆的发展形成了组织严密的学科,为后来的基础研究提供了广阔地空间。这一时期履带式车辆的发展主要依赖于汽车工业的发展,履带式车辆仅仅是汽车的衍生品,或是汽车的简单改造。
6.随着现代机电液压及人机工程技术的发展,在机械系统上附加液压泵-液压马达驱动的机械-液压转向系统将逐渐得到应用。机械液压式双流差速式转向机构是利用液压
机械无级传动原理,将液压传动与齿轮传动恰当组合的一种新型封闭双流传动机构。这种转向机构在国外军用装甲车辆、拖拉机、推土机及其他工程机械上已开始使用,国内对液压机械差速转向机构的研究和应用主要是针对军用履带车辆,在民用方面主要是对适用于农业拖拉机工况的液压机械无级变速器进行了开发研究。
7.机械液压双功率流的差速转向系最初是应用在军用车辆和大功率履带工程车辆上,如日本小松的d61ex/px、美国卡特彼勒的d6r,d8n工业推土机等。卡特彼勒公司在进入农机市场后推出的challengermt700/800系列,约翰.迪尔公司的8000/9000系列农业橡胶履带拖拉机以及中国一拖集团生产的东方红1302r/1502r拖拉机都是采用这种传动方式。
技术实现要素:
8.本实用新型的目的在于,提供一种双驱式电动滩涂车,以实现通过两个操作杆完成前进、后退以及转向三种操控,并在直行动作时仅需要操作一个操作杆。
9.为达成上述目的,本实用新型提供如下技术方案:一种双驱式电动滩涂车,包括左电机、右电机、左主动轮以及右主动轮,所述左电机和右电机分别用于驱动所述左主动轮和右主动轮,还包括:
10.操作系统,所述操作系统包括左操作杆、右操作杆、左半轴、右半轴以及行星齿轮架,所述右操作杆与所述行星齿轮架固定连接,所述左操作杆与所述左半轴固定连接,所述左半轴和右半轴相互靠近的端部均设有太阳锥齿轮,所述行星齿轮架上设有两个行星锥齿轮,两个所述太阳锥齿轮均分别与两个所述行星锥齿轮啮合,所述行星齿轮架上设有右角度传感器,所述左半轴上设有左角度传感器;以及
11.控制系统,所述控制系统分别与所述左角度传感器、右角度传感器、左电机和右电机电连接,所述控制系统根据所述左角度传感器和右角度传感器采集的角度信号控制所述左电机和右电机的转向和转速。
12.作为优选,所述双驱式电动滩涂车包括底盘和分别设置于底盘两侧的车架。
13.作为优选,所述左半轴和右半轴分别通过支架设置于所述底盘底面,所述左半轴和右半轴的轴线在同一条直线上。
14.作为优选,所述行星齿轮架可转动地设置于所述右半轴上。
15.作为优选,两个所述的太阳锥齿轮相互对称,两个所述的行星锥齿轮相互对称。
16.作为优选,所述行星齿轮架上开设有右操作杆固定槽,所述左半轴上设有左操作杆固定槽,所述左操作杆的底端和右操作杆的底端分别固定插接在所述左操作杆固定槽和右操作杆固定槽内。
17.作为优选,所述底盘开设有分别供所述左操作杆和右操作杆穿过的开口,所述左操作杆和右操作杆的顶端穿过开口后位于底盘上方。
18.作为优选,所述底盘上设有档位标识。
19.作为优选,所述操作系统外设有操作系统外壳。
20.作为优选,所述车架两侧分别设有履带、用于支撑履带的若干支撑轮和张紧轮,所述左主动轮和右主动轮分别带动车架两侧的履带运行。
21.本实用新型与现有技术相对比,其有益效果在于:
22.1、本实用新型通过左操作杆和右操作杆分别驱动车辆两侧的车轮,其结构简单且
稳定性好,操作简便且易于上手,并且制造成本较低;当单独控制左操作杆时,左侧车轮运动,当单独控制右操作杆时,右侧车轮运动,从而实现车辆的转弯动作;当同时控制左右两个操作杆时,两侧车轮同时运动,从而实现车辆的直行动作。
23.2、本实用新型的操作系统是基于对称式锥形差速器的结构原理设计的机械结构,当单独操控右操作杆时,可自动带动左操作杆同步转动,从而当车辆需要直行时,仅需操作右操作杆即可实现。
附图说明
24.图1是对称式锥形差速器的结构原理。
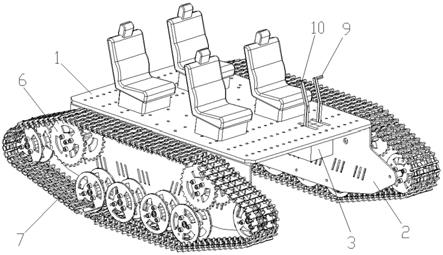
25.图2是本实用新型的整体结构示意图。
26.图3是本实用新型的底部结构示意图(图中未示出操作系统外壳)。
27.图4是本实用新型中操作系统的结构示意图。
28.图5是本实用新型操作系统中齿轮结构示意图。
29.图6是本实用新型中操作系统的安装结构示意图。
30.图7是本实用新型车辆静止状态操作杆示意图。
31.图8是本实用新型车辆直线前进状态操作杆示意图。
32.图9是本实用新型车辆前进状态右转时操作杆示意图。
33.图10是本实用新型车辆前进状态左转时操作杆示意图。
34.图11是本实用新型车辆直线倒车状态操作杆示意图。
35.图12是本实用新型车辆倒车状态右转时操作杆示意图。
36.图13是本实用新型车辆倒车状态左转时操作杆示意图。
37.图14是本实用新型车辆原地向左转向时操作杆示意图。
38.图15是本实用新型车辆原地向右转向时操作杆示意图。
具体实施方式
39.为了使本实用新型的目的、技术方案及优点更加清楚明白,下面通过实施例并结合附图,对本实用新型作进一步具体的说明。
40.本实施例中以驾驶位所在侧为左侧,所述的左主动轮、左电机、左操作杆、左半轴、左角度传感器等均位于驾驶位所在侧。
41.实施例:一种双驱式电动滩涂车,如图2-6所示,包括底盘1、分别设置于底盘1两侧的车架2、操作系统3以及控制系统8,其中底盘1下方设有左电机4和右电机5,车架2两侧分别设有履带7、若干支撑轮和张紧轮,支撑轮和张紧轮用于支撑或张紧履带7,车架2两侧还分别设有左主动轮和右主动轮6,左主动轮用于带动左侧的履带运行,右主动轮6用于带动右侧的履带运行,左主动轮和右主动轮分别由左电机4和右电机5驱动。
42.本实用新型的操作系统是基于对称式锥形差速器的结构原理设计的机械结构,根据差速器的原理,如图1所示,差速器壳300作为差速器中的主动件,与行星齿轮轴500连成一体,半轴齿轮100和200为差速器中的从动件,行星齿轮400既可随行星齿轮轴500一起绕差速器旋转轴线公转,又可绕行星齿轮轴500轴线自转。当装有差速器的车辆直线行驶时,左右轮受到的阻力一样,行星齿轮400不自转,把动力传递到两个半轴上,这时左右车轮转
速一致;当车辆转弯时,行星齿轮400绕半轴转动并同时自转,使车轮能够以不同的转速旋转,保证汽车顺利过弯。
43.具体而言,本实施例中的操作系统3包括左操作杆9、右操作杆10、左半轴11、右半轴12以及行星齿轮架13,其中左半轴11和右半轴12分别通过支架16设置于底盘1底面,并且左半轴11和右半轴12的轴线在同一条直线上,二者相互靠近的端部均设有太阳锥齿轮14,两个太阳锥齿轮14相互对称;行星齿轮架13通过轴承可转动地设置于右半轴12上,行星齿轮架13与右半轴12可相对转动;行星齿轮架13上设有两个上下对称的行星锥齿轮15,两个太阳锥齿轮14分别与两个行星锥齿轮15啮合,四个锥齿轮呈方形分布。操作系统3外设有操作系统外壳,用于对操作系统3进行保护。
44.上述结构中,行星齿轮架13上开设有右操作杆固定槽18,右操作杆10的底端固定插接在右操作杆固定槽18内,通过操控右操作杆10可带动行星齿轮架13旋转;左半轴11上设有左操作杆固定槽17,左操作杆9固定插接在左操作杆固定槽17内,通过操控左操作杆9可带动左半轴11旋转。
45.为了采集左操作杆9和右操作杆10的转动信号,在行星齿轮架13上设置右角度传感器20,左半轴11上设置左角度传感器19,当操控左操作杆9或右操作杆10时,左半轴11或行星齿轮架13将随之旋转一定角度,左角度传感器19或右角度传感器20将采集其旋转的具体角度。
46.本实施例中,底盘1上位于驾驶位的前方开设有分别供左操作杆9和右操作杆10穿过的两个开口,左操作杆9和右操作杆10的顶端穿过开口后位于底盘1上方,并位于驾驶位的前方,便于驾驶员操控。两个开口之间设有档位标识,设置三个档位:n档(空档)、d档(前进档)、r档(倒档)。
47.本实施例中,控制系统8分别与左角度传感器19、右角度传感器20、左电机4和右电机5电连接,控制系统8根据左角度传感器19和右角度传感器20采集到的角度信息来线性控制左电机4和右电机5的转速,从而控制左右两侧履带的前进速度,当左操作杆9或右操作杆10向前推进时,左电机4或右电机5正转,带动对应的履带前进,并控制左操作杆9或右操作杆10在n档和d档之间的位置就可以控制相应侧的履带的转速;同理,当左操作杆9或右操作杆10向后推进时,左电机4或右电机5反转,带动对应的履带倒退。
48.本实施例中,角度传感器选用山西泰润达科技公司的vta10系列通用角度传感器,该角度传感器采用固态磁技术实现角度信号的检测,具有角度传感器、角度编码器、角度位置开关功能,既可以单功能独立应用,又可以多功能混合应用,具有军工品质,适用于要求在恶劣环境中依然拥有高可靠性的领域。控制系统8为微控制器(mcu),并选用mcs-51系列单片机中的8051作为控制元件。
49.本实施例在具体实施时,其控制过程原理如下:
50.车辆处于静止状态,如图7所示,对车辆无任何操作的状态下,左右操作杆都位于n档(空挡)位,此时与操作杆相连的行星齿轮架13和左半轴11都没有转动,车辆不直线行驶也不转向。
51.车辆直线前进状态,如图8所示,此时由于左右操作杆都置于d档(前进档),受操作杆控制的两侧履带以同样的转速向前转动,车辆就处于直线前进运动状态。值得注意的是,本实用新型的操作系统机械结构部分是基于对称式锥形差速器设计的,且右操作杆10与行
星齿轮架13刚性连接能够一起周向转动。因此由差速器的工作原理可知,行星齿轮架13可以带动两侧太阳锥齿轮14等速转动。所以仅需控制右操作杆10就能带动与左半轴11刚性连接的左操作杆9一起运动,且由于两侧半轴齿轮半径、齿数相等,带动左、右操作杆的移动距离也相等。简而言之,在控制车辆直线前进时,仅需将右操作杆10移动到d档,左操作杆9也会随之移动到d档。
52.车辆前进过程中转向,根据上述车辆直线前进状态可知,左、右操作杆都位于d档,当车辆在前进过程中需要转向时,可通过分别控制左、右操作杆来实现。由设计的思路可知,角度传感器通过识别操作杆的转动角度来线性控制两侧电机的转动速度,从而控制左右两侧履带的前进速度。因此控制操作杆在n档和d档之间的距离就可以控制相应侧履带的转动速度。当车辆在直行状态准备右转时,需保持左侧履带行进速度大于右侧履带行进速度,而此时的控制动作是,控制左操作杆9的行程大于右操作杆10的行程,控制左、右操作杆的行程差就能控制车辆转向的半径,如图9所示;值得注意的是,此时左、右手要分别控制左、右操作杆,由于差速器的原理,左、右操作杆的差速运动可通过结构中行星锥齿轮的自转消除,使左右操作杆的前后运动互不干涉。同理当车辆在直行状态准备左转时,需保持右侧履带行进速度大于左侧履带行进速度。而此时的控制动作是:控制右操作杆10的行程大于左操作杆9的行程,控制左、右操作杆的行程差就能控制车辆转向的半径。如图10所示。
53.车辆直线倒车状态,如图11所示,与上述车辆直线前进状态同理,需要车辆直线倒车时,也仅需控制右操作杆10向r档(倒挡)移动,左操作杆9也会随之以相同速度移动,控制车辆两侧履带等速向后转动,实现车辆直线后退的状态。
54.车辆倒车过程中转向,同车辆直线过程中转向所述原理相同。当车辆在倒车状态准备右转时,需保持左侧履带行进速度大于右侧履带行进速度。而此时的控制动作是:控制左操作杆9的行程大于右操作杆10的行程,控制左、右操作杆的行程差就能控制车辆转向的半径,如图12所示。同理当车辆在倒车状态准备左转时,需保持右侧履带行进速度大于左侧履带行进速度。而此时的控制动作是:控制右操作杆10的行程大于左操作杆9的行程,控制左、右操作杆的行程差就能控制车辆转向的半径,如图13所示。
55.车辆原地转向,履带车通常需要具备原地转向的能力,本设计的操作机构同样能够实现车辆的原地转向操纵,如图14所示,控制左操作杆9在n档,即保持车辆左侧履带静止不动。移动右操作杆10向前或者向后,即控制车辆右侧履带正转或反转,实现车辆的原地向左转向。同理,控制右操作杆10在n档,即保持车辆右侧履带静止不动。移动左操作杆9向前或者向后,即控制车辆左侧履带正转或反转,实现车辆的原地向右转向,如图15所示。
56.上述实施例只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1