智能中置电机的制作方法
1.本实用新型涉及电动自行车领域,尤其涉及一种智能中置电机。
背景技术:
2.随着人们环保意识的的增强,具有高效节能的电动自行车越来越受到人们的青睐,人们对现有自行车的电动助力体验要求越来越高,助力的启动和关闭尤为关键,现有的电动助力电机减速比小,电机的体积较大,与整车的一体性较差。
技术实现要素:
3.本实用新型的目的在于为克服现有技术的缺陷,而提供一种智能中置电机。
4.为实现上述目的,本实用新型采用以下技术方案:
5.一种智能中置电机,包括壳体,所述壳体内设中轴和行星减速结构,中轴和行星减速结构通过输出齿轮连接,所述输出齿轮通过单向器套设于中轴上,中轴上设扭力传感结构,所述扭力传感结构与控制器连接;所述中轴和行星减速结构的行星支撑轴平行设置。
6.优选地,所述行星减速机构包括与壳体固定连接的定子,所述行星支撑轴一端固定于定子或者壳体上,另一端固定于壳体的内壁上,行星支撑轴上套设转子;所述转子与套设于行星支撑轴上的太阳轮固定连接,行星支撑轴上还套设行星支架,所述行星支架与行星支撑轴之间通过轴承连接,并与壳体之间通过内齿圈连接;行星支架内侧设行星齿轮,所述行星齿轮和太阳轮之间齿轮连接;行星支架外侧固定设有行星输出轮,所述行星输出轮与输出齿轮之间齿轮连接,行星输出轮和行星支撑轴之间轴承连接。
7.优选地,所述行星支撑轴与壳体转动连接,行星支撑轴上固定设有转子和太阳轮,行星支撑轴上还套设行星支架,行星支架与行星支撑轴之间通过轴承连接,壳体上设有定子;所述行星支架与行星支撑轴之间通过轴承连接,并与壳体之间通过内齿圈连接;行星支架内侧设行星齿轮,所述行星齿轮和太阳轮之间齿轮连接;行星支架外侧固定设有行星输出轮,所述行星输出轮与输出齿轮之间齿轮连接,行星输出轮和行星支撑轴之间轴承连接,行星支撑轴和太阳轮一体成型。
8.优选地,所述行星支架和壳体内壁上的内齿圈为斜齿连接,在行星支架和太阳轮之间设止推轴承。
9.优选地,所述传感器结构包括套设中轴上的扭力套,扭力套上粘贴有应变片,所述应变片与力矩电路板连接。
10.优选地,所述扭力套两端分别有连接牙盘和棘齿圈,棘齿圈和扭力套通过棘齿啮合、并与中轴通过齿滑动套接,所述棘齿圈上设磁环,单向器套设于扭力套上。
11.优选地,力矩电路板设于扭力套与棘齿圈相连接的一端,与力矩电路板相对的壳体内壁上固定设有供电板,供电板与控制器连接。
12.优选地,所述扭力套外套设防尘罩。
13.本实用新型与现有技术相比的有益效果是:
14.1)本实用新型电机减速比大,电机的体积较小,与整车的一体性良好。
15.2)本实用新型结构简单精巧,精准控制电机的启动和关闭,助力效果明显。
16.3)本实用新型整机配合结构的稳定性高,功耗小。
17.下面结合附图和具体实施例对本实用新型作进一步描述。
附图说明
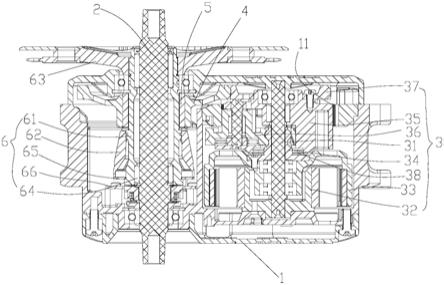
18.图1为本实用新型第一优选实施例的剖视结构示意图;
19.图2为本实用新型第二优选实施例的剖视结构示意图。
具体实施方式
20.为了更充分理解本实用新型的技术内容,下面结合具体实施例对本实用新型的技术方案进一步介绍和说明。
21.如图1、图2所示,一种智能中置电机,包括壳体1,壳体1内设中轴2和行星减速结构3,中轴2和行星减速结构3通过输出齿轮4连接,输出齿轮4通过单向器5套设于中轴2上,中轴2上设扭力传感结构6,扭力传感结构6与控制器连接;中轴2和行星减速结构3的行星支撑轴31平行设置。中轴2和行星支撑轴31的平行设置有效的减小了电机的体积,与整车的一体性良好。同时精准控制电机的启动和关闭,助力效果明显。
22.图1所示,为本实用新型第一优选实施例的剖视结构示意图,其行星减速机构3包括与壳体1固定连接的定子32,行星支撑轴31一端固定于定子32或者壳体1上,另一端固定于壳体1的内壁上,行星支撑轴31上套设转子33;转子33与套设于行星支撑轴31上的太阳轮34固定连接,行星支撑轴31上还套设行星支架35,行星支架35、与行星支撑轴31之间通过轴承连接,并与壳体1之间通过内齿圈11连接;行星支架35内侧设行星齿轮36,行星齿轮36和太阳轮34之间齿轮连接;行星支架35外侧固定设有行星输出轮37,行星输出轮37与输出齿轮4之间齿轮连接,行星输出轮37和行星支撑轴31之间轴承连接。转子33、太阳轮34、行星齿轮36、行星支架35、行星输出轮37、输出齿轮4之间依次传输动力并完成减速助力,结构紧凑。
23.如图2所示,为本实用新型第二优选实施例的剖视结构示意图,行星支撑轴31与壳体1转动连接,行星支撑轴31上固定设有转子33和太阳轮34,行星支撑轴31上还套设行星支架35,行星支架35与行星支撑轴31之间通过轴承连接,壳体1上设有定子32;行星支架35与行星支撑轴31之间通过轴承连接,并与壳体1之间通过内齿圈11连接;行星支架35内侧设行星齿轮36,行星齿轮36和太阳轮34之间齿轮连接;行星支架35外侧固定设有行星输出轮37,行星输出轮37与输出齿轮4之间齿轮连接,行星输出轮37和行星支撑轴31之间轴承连接,行星支撑轴31和太阳轮34一体成型。行星支撑轴31和转子33、太阳轮34固定连接,由太阳轮34输出动力,在行星齿轮36、行星支架35、行星输出轮37、输出齿轮4之间依次传输动力并完成减速助力,结构紧凑。
24.具体的,行星支架35和壳体1内壁上的内齿圈11为斜齿连接,在行星支架35和太阳轮34之间设止推轴承38。
25.具体的,传感器结构6包括套设中轴2上的扭力套61,扭力套61上粘贴有应变片,应变片与力矩电路板65连接。
26.具体的,扭力套61两端分别有连接牙盘63和棘齿圈64,棘齿圈64和扭力套61通过棘齿啮合、并与中轴2通过齿滑动套接,棘齿圈64上设磁环,单向器5套设于扭力套61上。
27.具体的,力矩电路板65设于扭力套与棘齿圈相连接的一端,与力矩电路板65相对的壳体1内壁上固定设有供电板66,供电板66与控制器连接。
28.具体的,扭力套61外套设防尘罩62。
29.本实用新型的工作原理如下:
30.在骑行时,施加踏力于脚踏,脚踏通过牙盘63驱动链条并带动中轴2旋转,中轴2、棘齿圈64、扭力套61依次传输动力,应变片产生应变,力矩电路板65传输信号给供电板66,供电版将检测的驱动牙盘63的扭力数据传输至控制器,控制器依据助力条件控制电机转子33工作,最终通过输出齿轮4及单向器4传输动力至扭力套61和牙盘63,完成助力。在停止踩踏时,转子33还在工作,会带动扭套61和牙盘63转动,但是棘齿圈64与扭力套61脱开,磁环固定在棘齿圈64上,供电板66上的霍尔检测到磁环没有转动,控制器停止工作,停止助力。在转子33停止工作或断电骑行时,单向器4脱开,转子33工作驱动时,单向器4啮合。
31.以上所述仅以实施例来进一步说明本实用新型的技术内容,以便于读者更容易理解,但不代表本实用新型的实施方式仅限于此,其中各部件的局部结构、连接方式可以根据实际情况有所调整,任何依本实用新型所做的技术延伸或再创造,均受本实用新型的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1