一种可变径石油管道内壁巡检机器人的制作方法
1.本实用新型涉及管道攀爬装置技术领域,具体涉及一种可变径石油管道内壁巡检机器人。
背景技术:
2.随着现代科学技术的发展,管道运输作为一种高效、安全、可靠的手段应用日益广泛,城市中的地下排水系统、取暖系统、煤气系统、自来水系统等都应用了各种管道;另外,在现代工农业、石油、化学、核工业等领域也大量使用了管道。
3.经过长期使用,它们会出现裂纹、腐蚀、堵塞等故障。有的管道中输送的是剧毒或放射性介质,若这些管道产生裂纹、漏孔会造成介质泄漏,引起事故甚至发生灾难。
4.为了防患于未然,必须对这些管道进行定期检测和维修。但是它们有的埋在地下,甚至埋在海底,有的口径很小,人无法进入。挖出管道进行检测、维修既不经济又不现实,由此可见,管道机器人有着广阔的市场。我国早在1987年就开展了管内机器人的研究,并试制了几种模型,但总体水平较国外差。
5.管内机器人研究是机电一体化的高科技研究项目。在石油、化工、核工业、给排水等许多管道工程中,都需要进行管内检测、喷涂及加工等工作,管内机器人在完成这些工作中会发挥重要作用,因此,开发研究管内机器人意义很大。
技术实现要素:
6.为克服现有技术的缺陷,本实用新型的目的在于提供一种可变径石油管道内壁巡检机器人,以实现在不同管径的管道中稳定移动。
7.为此,本实用新型提出了一种可变径石油管道内壁巡检机器人,包括机架、两个三足行走机构、以及调节机构。
8.所述机架包括用于安装所述三足行走机构的三角支架、用于安装工作体的三角安装平台、以及用于连接所述三角支架与所述三角安装平台的固定支撑杆。所述三足行走机构包括三条与所述三角支架连接的行走腿、设置在所述行走腿末端的行走轮、与所述行走轮传动连接的一对啮合锥齿轮、以及第二减速电机,所述第二减速电机通过一对啮合锥齿轮驱动所述行走轮转动,以带动整个巡检机器人在管道中移动。所述调节机构设置在三条所述行走腿内侧,用于调节所述三足行走机构中三个行走腿之间夹角,使所述行走轮适应不同管径的管道。
9.进一步地,每个所述三足行走机构中仅设置一个所述第二减速电机和一对所述啮合锥齿轮,且所述第二减速电机和所述啮合锥齿轮均设置在一条所述行走腿上。
10.进一步地,所述三足行走机构中的三条所述行走腿呈环形阵列分布。
11.进一步地,所述调节机构包括活动三脚支架、第一减速电机、齿轮传动机构、滚珠丝杠组件、以及支撑连杆,所述第一减速电机能通过所述齿轮传动机构和所述滚珠丝杠组件带动所述活动三脚支架和所述支撑连杆移动,以改变所述行走腿之间的夹角。
12.进一步地,所述滚珠丝杠组件包括丝杆和螺母,所述螺母与所述活动三脚支架连接,所述丝杆与所述齿轮传动机构中第一齿轮组的中心齿轮连接,所述中心齿轮与所述第一减速电机传动连接。
13.进一步地,所述齿轮传动机构还包括第二齿轮组和传动轴,所述传动轴的一端与所述第一齿轮组传动连接,所述传动轴的另一端与所述第二齿轮组传动连接。
14.进一步地,所述活动三脚支架设置在三角支架与三角安装平台之间,并且与固定支撑杆滑动连接。
15.进一步地,所述支撑连杆一端与所述活动三脚支架铰接,所述支撑连杆另一端与所述行走轮中部铰接。
16.与现有技术相比,本实用新型的有益效果:
17.本实用新型的可变径石油管道内壁巡检机器人通过设置两个具有减速电机和行走轮的三足行走机构,使巡检机器人可以在管道中前后移动;通过设置调节机构,可以根据管道直径的不同调节三组行走机构中行走腿之间的夹角,使行走轮与管道内壁贴合,并能沿管道平稳移动;通过设置具有第一齿轮组和第二齿轮阻的齿轮传动机构,可以使用一个第一减速电机同时调节两个三足行走机构中的行走腿,使机器人机构更加简单实用,同时可以降低制造成本。
18.除了上面所描述的目的、特征和优点之外,本实用新型还有其它的目的、特征和优点。下面将参照图,对本实用新型作进一步详细的说明。
附图说明
19.构成本申请的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
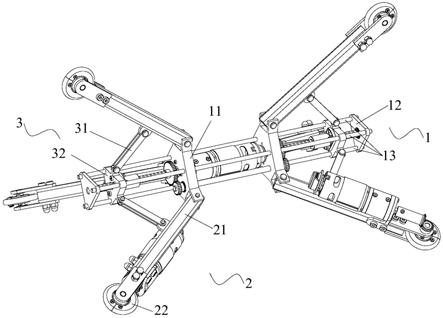
20.图1为本实用新型的可变径石油管道内壁巡检机器人的立体结构示意图一;以及
21.图2为本实用新型的可变径石油管道内壁巡检机器人的立体结构示意图二。
22.附图标记说明
23.1、机架;11、三角支架;12、三角安装平台;13、固定支撑杆;2、三足行走机构;21、行走腿;22、行走轮;23、第二减速电机;24、第一锥齿轮;25、第二锥齿轮;3、调节机构;31、支撑连杆;32、活动三脚支架;33、第一减速电机;34、第一齿轮组;341、中心齿轮;342、传动齿轮;35、第二齿轮组;36、传动轴;37、滚珠丝杠组件。
具体实施方式
24.需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
25.图1
‑
图2示出了根据本实用新型的一些实施例。
26.如图1所示,一种可变径石油管道内壁巡检机器人,包括用于安装工作体的机架1和分别安装在机架1前后两端的两个三足行走机构2,三足行走机构2工作能带动安装有工作体的巡检机器人前进,其中工作体为油管检测装置,从而可以通过本实用新型的巡检机器人对管道进行检测维修操作。
27.具体地,如图2所示,机架1包括两个用于安装三足行走机构2的三角支架11、两个安装工作体的三角安装平台12、以及三根用于将三角支架11与三角安装平台12连接固定的固定支撑杆13,机架1作为巡检机器人的基础结构,用于安装三足行走机构2。
28.具体地,如图2所示,每个三足行走机构2都包括三条行走腿21、三个行走轮22、一个第二减速电机23、以及一对啮合锥齿轮,三条行走腿21以管道中心轴为中心轴的圆环形阵列分布,行走轮22安装在行走腿21的一端,行走腿21的另一端与三角支架11连接;啮合锥齿轮和第二减速电机23仅设有一个,并且都安装在三足行走机构2的三条行走腿中有一条行走腿21上,用于驱动行走轮22转动,进而带动整个巡检机器人移动。
29.其中,所述第二减速电机23包括旋转电机和减速器,一对啮合锥齿轮中第一锥齿轮24与减速器传动连接,一对啮合锥齿轮中的第二锥齿轮25与行走轮22的转轴连接,从而可以通过第二减速电机23驱动行走轮22转动,进而实现带动整个巡检机器人在管道中移动的目的。
30.在一实施例中,如图2所示,上述巡检机器人上还设有用于调节三足行走机构2中三个行走腿21之间倾斜角的调节机构3,调节机构3设置在三足行走机构2内侧,调节机构3包括活动三脚支架32、第一减速电机33、齿轮传动机构、滚珠丝杠组件37、以及三组支撑连杆31。
31.其中,活动三脚支架32设置在三角支架11与三角安装平台12之间,并且与固定支撑杆13滑动连接;支撑连杆31一端与活动三脚支架32铰接,另一端与行走轮22中部铰接。
32.同时,第一减速电机33与三角支架11、活动三脚支架32分别连接,第一减速电机33通过齿轮传动机构能驱动活动三脚支架32沿所述固定支撑杆13直线移动,进而推动三个行走腿21向外张开或者向内收拢,使行走轮22与管道内壁贴紧,并能沿着管道移动。
33.其中,如图2所示,齿轮传动机构包括第一齿轮组34、第二齿轮组35、以及传动轴36,传动轴36通过轴承安装在两个三角安装平台12上,传动轴36的一端与第一齿轮组34传动连接,传动轴36的另一端与第二齿轮组35传动连接。
34.滚珠丝杠组件37包括丝杆和螺母,螺母固定在活动三脚支架32上,丝杆与第一齿轮组34的中心齿轮341固定连接,并且丝杆的两端与三角支架11、三角安装平台12分别转动连接;同时,第一减速电机33包括旋转电机和减速器,减速器的输出轴与第一齿轮组34的中心齿轮341传动连接。
35.当第一减速电机33工作时,可以驱动第一齿轮组34的中心齿轮341转动,中心齿轮341再带动丝杆在螺母内转动,使活动三脚支架32随螺母沿丝杆轴向移动,同时支撑连杆31随活动三角支架移动而发生转动,推动三个行走腿21向外张开或者向内收拢,使行走轮22与管道内壁贴紧。
36.在第一齿轮组34的中心齿轮341转动的同时,第一齿轮组34的传动齿轮342随中心齿轮341转动而转动,从传动齿轮342再通过传动轴36带动第二齿轮组35运转,进一步带动与第二齿轮组35连接的滚珠丝杠组件37工作,使另一组三足行走机构2中的三个行走腿21向外张开或者向内收拢,使机器人两端的所有行走轮22均与管道内壁贴紧,完成机器人行走前的调试工作。
37.本实用新型的可变径石油管道内壁巡检机器人的工作过程如下:
38.首先,通过调节机构3调节三足行走机构2中行走腿21向内收缩,使整个巡检机器
人能放入管道。
39.然后,通过调节机构3中第一减速电机33转动使三足行走机构2中行走腿21向外张开;具体步骤:第一减速电机33转动驱动第一齿轮组34运转,同时第一齿轮组34通过传动轴36将旋转运动传递到第二齿轮组35。
40.再然后,同时转动的第一齿轮组34和第二齿轮组35分别带动一个滚珠丝杠组件37中的丝杆在螺母内转动,使活动三脚支架32沿丝杆轴向移动,而支撑连杆31随活动三角支架移动而转动,可以推动行走腿21向外张开,使机器人两端的所有行走轮22均与管道内壁贴紧。
41.最后,通过第二减速电机23驱动第一锥齿轮24和第二锥齿轮25转动,进而带动行走轮22滚动,最终实现整个巡检机器人的移动。
42.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1