具有冗余角位置感测和行程终点止动件的线控转向系统的制作方法
1.本发明涉及线控转向系统,更具体地说,涉及具有冗余角位置感测、可选操作模式和行程终点止动件的线控转向系统。
背景技术:
2.传统车辆通过方向盘、转向齿轮和实际车轮之间的直接机械和/或液压连接来转向。利用这样的系统,司机转动方向盘,进而,转向齿轮转动车轮。该系统的感知是由机械联动装置产生的,该机械联动装置可以是助力的。系统感知的变化可能表明一个或多个部件功能不正常或处于不正常状态,例如车轮不平衡或错位。
3.为了提供各种优点,可以用线控转向系统代替直接机械联动。在线控转向系统中,位置编码器监控方向盘的位置。位置编码器读数被转换成转向角的期望位置。电信号被发送到转向控制单元,以响应于该信号正确地转动车轮。
4.线控转向系统具有很大的潜力,因为消除了许多所需的机械连接和部件。然而,在这些系统中,没有向驾驶员提供转向系统中出现的扭矩和扭矩波动的任何反馈。已经开发了各种系统来为驾驶员提供线控转向系统所需的感知。例如,参见2004年4月27日授予yao等人的美国专利no.6,728,615和2000年8月1日授予discenzo的美国专利no.6,097,286。
5.此外,在传统的转向系统中,当到达可用行程范围的终点时,方向盘和车轮导向机构之间的物理连接产生了对方向盘的行程限制。然而,在线控转向系统中,有必要为方向盘创建行程终点止动。例如,参见2005年5月31日授权给husain等人的美国专利no.6,899,196、2002年11月19日授权给millsap等人的美国专利no.6,481,526以及2017年11月9日公布的授权给levesque等人的美国专利公开no.2017/0320515。现有技术的方法往往成本高、消耗功率、过于复杂、堵塞或者不是最佳的。
6.此外,传统的液压和机械转向系统受限于固定的转向比。转向力仅由液压和/或机械部件的设计决定。一些液压系统通过切换额外的泵送能力来改变转向比的能力有限。然而,在本领域中,这些系统很难轻松或经济地改变转向特性。在2001年4月17日授权给dilger等人的美国专利no.6,219,604、1999年3月23日授权给bohner等人的美国专利no.5,884,724以及2004年4月1日授权给stout等人的美国专利公开no.2004/0064229中示出了转向比修改的例子。
7.在传统的机械转向系统中,当车辆关闭时,机械和/或液压连接对方向盘的运动提供强大的阻力。然而,在线控转向系统中,当车辆关闭时,希望在操作的方向盘上产生阻力矩。例如,参见2014年6月17日授予rombold的美国专利no.8,752,664、2011年5月24日授予ito等人的美国专利no.7,946,195和2007年6月19日授予dominke等人的美国专利no.7,232,006。
技术实现要素:
8.鉴于以上所述,需要一种系统,其具有无刷dc电机的主动扭矩反馈,并且提供电机
换向和冗余的感测操作者输入。在一个实施例中,本主题技术涉及线控转向系统,该线控转向系统包括供操作者使用的方向盘和联接到方向盘用于提供主动扭矩反馈的电机组件。电机具有安装用于旋转的转子;至少一个磁体,其安装到转子上,用于围绕轴线旋转,其中,所述至少一个磁体是具有极对的永磁体。固定的定子具有用于产生电场以作用在所述至少一个磁体上的线圈。印刷电路板(pcb)位于所述至少一个磁体的轴上,用于控制定子线圈的换向,并产生指示操作者对方向盘的移动的主要的高分辨率角位置信号。与pcb通信的高分辨率轴上传感器检测转子和定子之间的换向位置,并产生至少一个磁体的极对的第一和第二连续角度测量值。优选地,第一和第二连续角度测量具有相位分离,使得所述至少一个磁体的运动方向被pcb检测和处理,以确定主要的高分辨率角位置信号。所述至少一个磁体可以横跨其直径被磁化,使得主要的高分辨率角位置信号是基于在启动时从参考高分辨率轴上传感器捕获实际位置的绝对位置测量,通过在启动时将增量数据应用于实际位置来保持实际位置。
9.此外,需要一种机械简单、坚固且不消耗能量的行程终点止动件。
10.本主题技术的另一实施例涉及一种用于转向系统的转向控制组件,该转向系统具有基于方向盘的旋转而绕轴线旋转的轴,其中该轴具有至少一个花键。该转向控制组件包括壳体,该壳体限定了具有内螺纹的轴向开口并围绕轴安装,该壳体具有第一平台凸台和第二平台凸台。盘具有与内螺纹联接的圆周螺纹。盘还限定了轴向通孔,其键联接到轴的至少一个花键,用于与轴一起旋转。该盘还包括相对的第一和第二面,其中第一凸起凸台设置在第一面上,第二凸起凸台设置在第二面上。轴在第一方向上的旋转导致盘在壳体内的旋转运动,进而轴向运动,直到第一凸起凸台接触第一平台凸台,以防止轴在第一方向上的进一步旋转(有效止动)。轴在第二方向上的旋转导致盘在壳体内的旋转运动,并进而导致相反的轴向运动,直到第二凸起凸台接触第二平台凸台,以防止轴在第二方向上的进一步旋转(第二有效止动)。转向控制组件还可以包括限定内部的固定定子,其中壳体和盘位于内部,以及联接到定子以封闭内部的端板。相对的第一和第二面可以具有用于第一和第二凸起凸台的多个安装位置,用于调节在第一和第二方向上的行程量。转向控制组件还可以包括用于插入第一或第二平台凸台之间的多个块,用于分别调节第一或第二方向上的行程量。
11.此外,需要线控转向系统能够容易且经济地改变现场的转向特性。在一个实施例中,本主题技术旨在基于由操作者或车辆的转向控制单元指定的操作模式来控制触觉条件。启动期望模式的信号可以源自车辆转向控制单元,并通过串行接口传送,例如控制器局域网(can)或标准车辆接口的其他典型接口。信号也可以通过来自操作者的直接输入来传送,例如按钮按压、扳机拉动或其他操作者输入。在一个实施例中,本主题技术针对线控转向系统的控制架构系统,其包括用于接收指示线控转向系统的操作模式的输入信号并基于该输入信号产生控制信号的转向控制单元,以及用于接收该控制信号并基于该控制信号控制电机以在选定的操作模式下完成线控转向系统的操作的电机驱动模块。优选地,操作模式从由以下组成的组中选择:“放置并保持”模式;“转向中心”模式;和“保持偏移”模式。
12.此外,还期望有一种模块化系统,其允许结合以及混合和匹配本文描述的技术,而不增加复杂性、降低鲁棒性或过于昂贵。
13.一个实施例涉及一种用于在线控转向系统中提供主动扭矩反馈的无刷dc电机。该
系统包括固定定子和安装成相对于固定定子旋转的转子,转子具有多个磁体,每个磁体形成一个极对。至少两个模拟磁传感器提供连续的角度测量信号。转向控制单元接收连续角度测量信号,并基于连续角度测量信号确定转子的相对位置测量值。转向控制单元还可以在启动时确定转子位置的绝对测量值,并基于相对位置测量值更新转子的位置。优选地,至少两个模拟磁传感器向转向控制单元提供电机换向数据,从而由转向控制单元确定固定定子和转子之间的相位关系。所述多个磁体可以是24个磁体,并且所述至少两个模拟磁传感器可以是三个彼此异相120电度的模拟磁传感器,使得所得到的连续角度测量信号基本上是锯齿波形,导致转子大约589,824次计数/转。
14.希望提供一种实用、可靠、故障安全的机构,以在车辆电源关闭时提供扭矩来将方向盘保持在某一位置。用于转向系统的断电扭矩组件的一个实施例包括基于方向盘的旋转绕轴线旋转的轴。第一和第二锥齿轮板围绕轴周向安装,其中第一锥齿轮安装成与轴一起旋转,第二锥齿轮围绕轴自由旋转。偏压组件将第一和第二锥齿轮板联接在一起,以绕轴旋转。断电制动机构具有小齿轮,用于选择性地与第一和第二锥齿轮板接合,使得当接合时,第一和第二锥齿轮板沿相反方向旋转,以在轴上产生摩擦扭矩来抵抗其旋转。应当理解,本主题技术可以以多种方式实现和利用,包括但不限于作为过程、装置、系统、设备、用于现在已知和以后开发的应用的方法或者计算机可读介质。从下面的描述和附图中,本文公开的系统的这些和其他独特特征将变得更加明显。
附图说明
15.为了使所公开的技术所属领域的普通技术人员更容易理解如何制造和使用本发明,可以参考以下附图。
16.图1是根据本公开的线控转向系统的示意图。
17.图2a是根据本公开的用于线控转向系统的无刷dc电机的透视图。
18.图2b是根据本公开的用于线控转向系统的无刷dc电机的平面图。
19.图3是根据本公开的用于线控转向系统的无刷dc电机的分解图。
20.图4是图3的无刷dc电机的传感器响应曲线图。
21.图5a是根据本公开的线控转向系统的行程止动组件的转向控制端的分解图。
22.图5b是根据本公开的线控转向系统的行程止动组件的转向控制端的组装横截面图。图5c是根据本公开的线控转向系统的行程止动组件的转向控制端的部分组装平面图。
23.图6是根据本公开的线控转向系统的控制架构系统的示意图。
24.图7a示出了操纵信号缩放和整形的传统线性关系。
25.图7b示出了转向比的传统线性关系。
26.图7c示出了根据本公开的使用正弦函数的导向信号缩放和整形性能。
27.图7d示出了根据本公开使用正弦函数的转向比性能。
28.图8a是根据本公开的处于第一配置的转向模块支撑组件的横截面图。
29.图8b是根据本公开的处于第二配置的图8a的转向模块支撑组件的横截面图。
30.图8c是根据本公开的用于图8a和8b的组件的壳体的独立透视图。
31.图8d是根据本公开的用于图8b的组件的端盖的独立透视图。
32.图8e是根据本公开的用于图8a的组件的端盖的独立透视图。
33.图8f是根据本公开的用于图8a和8b的组件的罩的独立透视图。图9a是根据本公开的处于第一配置的转向模块支撑组件的横截面图。
34.图9b是根据本公开的处于第二配置的图9a的转向模块支撑组件的横截面图。
35.图9c是根据本公开的用于图9a和9b的组件的端盖的独立透视图。
36.图9d是根据本公开的用于图9a和9b的组件的壳体的独立透视图。
37.图9e是根据本公开的用于图9a和9b的组件的壳体延长部的独立透视图。
38.图10a是根据本公开的具有用于线控转向系统的断电制动机构的转向组件的分解图。
39.图10b是图10a的转向组件的组装横截面图。
具体实施方式
40.本主题技术克服了与线控转向系统和方法相关的许多现有技术问题。从以下结合附图对某些优选实施例的详细描述中,本领域普通技术人员将更容易明白本文公开的技术的优点和其他特征,附图阐述了本技术的代表性实施例,其中相同的附图标记表示相似的结构元件。相对于附图使用方向指示,例如向上、向下、向右、向左等,并且不意味着以限制的方式。现在参考图1,示出了根据本发明的线控转向系统100的示意图。线控转向系统100在操作者和引导车轮的机构之间没有机械或液压连接。系统100具有用于操作者的方向盘102,方向盘102连接到转向柱104。编码器组件106跟踪柱104的运动,使得控制器或转向控制单元(scu)108可以将该运动转化为致动器控制信号。致动器控制信号被发送到致动器110,致动器110驱动转向机构112的期望运动,使得车轮114以期望的方式转动。
41.角位置传感器
42.需要一种低成本、冗余、高功能安全性的角位置感测组件,其感测诸如上述系统100的线控转向系统中的驾驶员输入。线控转向力反馈系统的一些特征要求准确且无噪声地近似驾驶员移动转向装置的速度。实现这一点的一种方法是通过实时计算位置的时间导数。通常,在使用数字位置传感器计算速度时,有两个主要的误差源。第一个是量化误差,这是由于每个采样时间周期收集的数据样本太少造成的。可以通过增加采样周期来增加数据样本的数量,或者通过增加位置测量的分辨率来减小量化误差。当这种测量用于产生线控操纵的力反馈时,增加采样时间会产生明显的时间延迟。因此,希望通过优化位置分辨率而不是增加采样周期来减小量化误差。
43.计算操作员控制输入设备速度的第二个误差源是信号噪声。可以通过在一个采样周期内对多个值进行平均来降低信号噪声。然而,希望将由大采样周期引起的时间延迟最小化。在本公开中,公开了一种通过增加位置测量的分辨率来减小量化误差的感测组件。图2a、2b和图3中示出了一个示例,下面将对其进行更详细的描述。优选地,感测组件将具有一个或多个角位置传感器,用于将驾驶员意图电子转化为车辆运动。功能安全实践推荐冗余感测,避免共因故障。换句话说,两种不同感测技术的冗余通常比单种感测技术的冗余更鲁棒。例如,光学编码器、具有磁体的霍尔效应装置和其他磁性装置(例如,各向异性磁阻(amr)、巨磁阻(gmr)、隧道磁阻(tmr)、庞磁阻(cmr)、异常磁阻(emr)等)的组合可用于冗余。典型的低成本感测方法,例如霍尔效应,能够在360度上具有大约12位的分辨率。与传统的霍尔效应传感器相比,更高分辨率的检测具有明显的优势。
44.仍然参照图2a、2b和图3,示出了根据本公开的用于线控转向系统的无刷dc(bldc)电机200的各种视图。电机200耦合到线控转向系统中,用于提供主动扭矩反馈。电机200包括具有多个磁体204的转子202,每个磁体是具有极对的永磁体。转子202围绕中心轴线旋转。在所示的实施例中,有二十四个磁体204,每个磁体204包括一个极对。
45.固定的定子206围绕转子202。定子206具有线圈,用于产生磁场来驱动磁体204,进而移动转子202。诸如印刷电路板(pcb)的电子器件(未示出)控制电机200的操作。电子器件可以安装在中心轴上或远程安装。电子器件发送和接收信号,用于控制定子线圈208的换向,并产生指示操作者方向盘运动的主要的高分辨率角位置信号。这样,电子器件也产生信号来控制致动器的运动,从而控制车轮的运动。电子器件还联接到三个高分辨率传感器212。电线214根据需要提供到定子206、传感器212和其他部件的电连接,尽管一些连接可以是无线的。
46.此外,连续的角度测量由电子器件处理,以确定主要的高分辨率角位置信号。尽管仅确定了增量位置移动,但是在启动和/或运行启动程序时,可以通过参考轴上传感器来确定绝对位置。一旦知道了绝对位置,电子器件就会使用差分数据来维持绝对位置,直到关机。因此,通过消除单点磁体故障,实现了高功能安全级别。此外,实现了具有异构冗余的独立角度感测路径。
47.高分辨率传感器212还为磁体204的每个极对产生第一和第二连续角度测量。在一个实施例中,第一和第二连续角度测量402、404具有相位分离,从而检测磁体204的运动方向。需要至少两个传感器212a-c来确定旋转方向,但是可以使用三个或更多个传感器。
48.通常,bldc电机使用霍尔开关进行换向。在该实施例中,感测组件包括三个霍尔效应传感器212a-c来代替霍尔开关。简而言之,模拟传感器被用来代替传统的数字传感器。霍尔效应传感器212a-c被最佳地放置以提供间隔120度电角度的正弦波形。霍尔效应传感器212a-c被校准以在0到5v dc的范围内输出模拟电压。然后,每个传感器212a-c的输出被用作12位、0至5v dc模数转换器(未示出)的输入,该转换器是线控转向系统的电子器件的一部分。
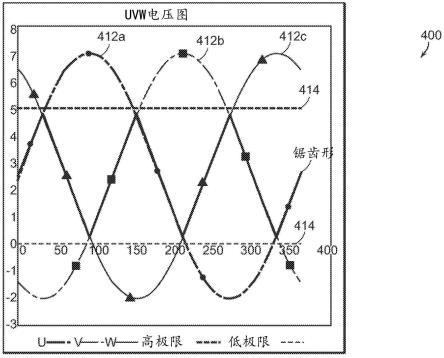
49.现在参考图4,示出了经过三个传感器212a-c的单个磁体的传感器响应的曲线图400。图表400分别包括每个传感器212a-c的完整正弦信号412a-c。由模拟输入的三个通道捕获的正弦信号412a-c被用在0v和5v的阈值414之间的它们各自的线性范围中。因此,信号412a-c的三个线性部分组合形成0到5v的锯齿波形,这在图4中突出显示。锯齿波形提供旋转位置的增量值。
50.如图4的锯齿图所示,三个通道一起工作,为bldc电机200的转子202上的每个磁体204产生12位a/d范围的六次完整扫描,每次扫描4096个点。需要注意的是,锯齿波的每一半是一个大约0.2至4.8v的扫描。对于二十四个磁体204,计数的数量如下:
51.(4096点)(6次扫描)(24个磁体)=589,824次计数/转。
52.在转子上使用12个磁体的情况下,这导致12个极对。计算得到的分辨率为每转294,912次计数,是标准12位霍尔效应传感器的72倍。可以看出,24个磁体的实施例产生了非常高的分辨率。
53.这种感测方法有显著的优点。首先,高分辨率允许用于速度估计的短得多的采样周期,这产生了高精度以及由于采样引起的极低的时间延迟。这为线控转向装置的操作者
带来了高质量的性能。第二个显著优点是高分辨率感测方法完全独立于用于绝对角度感测的冗余轴上传感器。这对于实现使用线控转向的主转向系统所需的高级功能安全性非常重要。另一个优点是高分辨率有助于克服计算速度时可能出现的电噪声。
54.行程终点止动
55.除了改进的角位置感测之外,还需要一种可靠的、低成本的机构来为多于一圈的转锁产生行程终点止动,以锁定线控转向系统,例如上述系统100。该机构与车辆中使用的转向系统类型无关。这些包括,但不限于阿克曼、差动和铰接转向系统。此外,这些转向类型可以包括轮胎、履带或在地面或水中引导车辆的任何其他器件。
56.现在参考图5a和5b,分别示出了根据本公开的具有线控转向系统的行程终点止动机构的转向控制组件500的分解图和组装横截面图。组件500适于根据需要选择性地抑制方向盘(未示出)的旋转。例如,控制组件500可以在一个或多个预先配置的止动件处抑制或防止方向盘旋转,例如,其中止动件抑制或防止方向盘的额外顺时针或逆时针旋转,如下面进一步描述的。此外,当点火关闭时,控制组件500也可以禁止方向盘转动。组件500不消耗任何电能。
57.如图5a和5b所示,转向控制组件500的部件适于包含在固定壳体502内,并被构造成使得线控转向系统的转向轴512的远端511从壳体502伸出。优选地,壳体502是杯形的,具有基本上或完全封闭的端部531。轴512沿着轴线a延伸并围绕轴线a旋转。壳体502的远端513具有内部台阶部分503,用于接收保护端板518的一部分。虽然端板518基本上封闭了壳体502的内部,但端板518包括供轴512穿过的中心孔519。端板518通过紧固件523联接到壳体502。
58.组件500还包括保持在壳体502内的螺纹插件505。螺纹插件505是具有内螺纹507的管状。螺纹插件505例如通过穿过壳体502中的孔525进入螺纹插件505中的螺纹孔527的一个或多个紧固件(未示出)固定在壳体502内。螺纹插件505也可以与壳体502一体形成。
59.组件500还包括具有圆周螺纹509的圆盘504,该圆周螺纹509与螺纹插件505的内螺纹507接合。盘504具有中心轴向通孔506,该中心轴向通孔506具有一个或多个键特征508,以与轴512上的对应花键510配合,使得轴512在顺时针和逆时针方向上的旋转导致盘504在对应方向上旋转。如图所示,键特征508是两个相对的槽,花键510联接到轴512上的轴环535。可选地,通孔506具有一个或多个花键特征,以与轴512上的对应槽配合,从而将盘504和轴512联接在一起。
60.圆盘504具有远端面515,远端面515具有相对的近端面(未标出)。第一凸起凸台514设置在远端面515上,第二凸起凸台(未明确示出)设置在近端面上。凸起凸台514与附接到壳体502的平台凸台516、517相互作用。远端的平台凸台516安装在台阶部分503中,以与远端面515上的第一凸起凸台514相互作用。近端平台凸台517进一步安装在壳体502内,以与盘502的近端表面上的第二凸起凸台相互作用。因此,圆盘504的旋转行程受到限制,这取决于凸起凸台514和平台凸台516、517是如何形成和安装的以及在哪里形成和安装的。通过改变安装位置,平台凸台516、517特别容易移动,从而改变行程范围。
61.组件500还包括两个轴承520,以允许盘504旋转,同时仍然支撑轴512。垫圈522和密封环524邻近轴承520,以减少摩擦并根据特定应用的需要提供密封。组件500还可以包括一个或多个紧固件533(例如螺栓、销、垫圈、螺钉、环氧树脂等)垫圈、凸缘等,用于组装转向
控制组件500。
62.图5c示出了处于完全逆时针位置的行程止动组件500的部分组装的转向控制端的平面剖视图。如图5c所示,远端的凸起凸台514位于盘504的远端面515上,以倾斜抵靠远端的平台凸台516。远端的平台凸台516在壳体502的台阶部分503内的第一端516a处附接,使得第二端516b朝向轴512轴向向内延伸。类似地,平台凸台517可以与近端面上的凸起凸台相互作用,以限制顺时针旋转。可选地,没有近端凸起,使得螺纹盘504可以顺时针旋转,直到凸起凸台514再次倾斜抵靠平台凸台516,其中这些倾斜位置之间的全部距离是旋转行程范围。在这种布置中,凸起凸台和平台凸台的尺寸决定了行程范围。
63.在使用中,当方向盘转动轴512时,由于盘504和壳体505的配合螺纹507、509的作用,盘504也转动并轴向穿过壳体505。选择螺纹507、509的数量和结构来限制方向盘的旋转量。
64.例如,在逆时针旋转方向上,一旦达到轴512的期望最大行程,盘504已经穿过壳体505行进了足够的轴向距离,使得第一凸起凸台514在圆周方向上与远端平台凸台516接触,防止轴512进一步转动,从而防止方向盘进一步转动。有利地,本公开的组件500抵抗由于第一凸起凸台514和远端的平台凸台516之间的周向定向接触而导致的堵塞。在顺时针旋转方向上,盘504在近端方向上轴向移动,使得第二凸起凸台521倾斜抵靠近端的平台凸台517,以限制方向盘在顺时针方向上的运动。
65.值得注意的是,组件500很容易通过调节远端的平台凸台516的位置来调节。壳体502可以具有多个安装孔,以适应平台凸台516、517的不同安装位置。此外,盘504上的平台凸台516、517或凸起凸台514、521的尺寸和形状可以改变,以改变硬止动件位置。替代地,一个或多个块可以插入平台凸台516、517的下方,或者安装到凸起凸台514、521,以进一步改变硬止动件位置。例如,远端的平台凸台516可以被填垫以进一步向远端延伸,并缩短盘502一整圈的行进量。还可以设想,远端的平台凸台516可以以不同的方式安装,例如安装在端板518上。
66.在替代实施例中,凸起凸台和平台凸台不是必需的。例如,内螺纹的数量或带有端板的壳体的构造限制了行程量。例如,转向控制组件可以在线控转向系统中提供行程止动件的端部,该转向控制组件包括:具有远端和近端的壳体,在远端和近端之间具有内螺纹;细长轴,该细长轴延伸到壳体中并联接到方向盘上以随其旋转;限定与内螺纹联接的圆周螺纹和轴向开口的盘,该盘用于联接到轴以与其一起旋转,同时可自由轴向移动;并且其中:轴在第一方向上的旋转导致盘旋转,并进而导致盘在壳体内沿远端方向的轴向运动,直到远端阻止轴在第一方向上的进一步旋转;并且轴在第二方向上的旋转导致盘旋转,并进而导致圆在壳体内沿近端方向的轴向运动,直到近端阻止轴在第二方向上的进一步旋转。优选地,端板联接到杯形壳体,以封闭壳体的内部,并在一个方向上作为止动件,而封闭的杯形端部在另一个方向上作为止动件。替代地,移动到螺纹端部的圆盘可以在一个或两个行进方向上作为止动件。
67.可选模式除了产生行程终点止动件的机构之外,在线控转向系统(例如上述系统100)中,还需要附加的增值特征,例如数字通信和可选择的操作模式。这些功能将适用于方向盘和操纵杆应用。这些特征与车辆中使用的转向系统类型无关。这些包括,但不限于阿克曼、差动和铰接转向系统。此外,这些转向类型可以包括轮胎、履带或在地面或水中引导车
辆的任何其他器件。
68.现在参考图6,示出了根据本公开的线控转向系统的控制架构系统600的示意图。系统600旨在支持本文描述的大多数应用。为了安全起见,系统600包括由光隔离器603互连的冗余子组件601a、601b。
69.控制架构系统600还利用控制器局域网(can)和模拟车辆接口,并且通过较小的修改,支持脉宽调制(pwm)。与传统的模拟或pwm通信方案相比,系统600有利地提供了更好的抗电磁干扰(emi)的鲁棒性。系统600还提供了诊断错误消息的选项。在系统600的一个方面,can总线在车辆上可用,以允许微控制器和设备在没有主计算机的情况下相互通信。can总线提供emi鲁棒性以及诊断信息功能。如图6中的系统600所示,冗余can接口602被用作主要通信手段。
70.每个子组件601a、601b包括具有相关传感器逻辑模块608a、608b的传感器604a-c。为了安全起见,每个传感器逻辑模块608a、608b具有监视器609a、609b,其是用于检测计算机故障并从中恢复的电子定时器。传感器逻辑模块608a、608b与车辆电子控制单元612通信。这种通信是通过与emc保护模块613a、613b的路径进行的。传感器604a-c和相关联的逻辑模块608a、608b分别由低压电源615a、615b供电,低压电源615a、615b也通过emc保护模块621a、621b连接到车辆电池619。低压电源615b还驱动从传感器逻辑模块608b接收控制信号的电机驱动模块610。反过来,电机驱动模块610控制电机组件618。在图6所示的实施例中,电机驱动模块610控制电机和制动器。这样,电机和扭矩命令被发送到电机组件618。
71.在控制架构系统600的应用示例中,总体操作是允许用户选择适合于驾驶条件的期望操作模式的操作。开关或选择器旋钮(未示出)允许用户在各种操作模式之间进行选择。此外,操作模式可以通过can总线上的can命令来选择。
72.在典型的农业和建筑车辆中,控制手柄所需的触觉响应取决于车辆正在完成的功能。例如,在道路施工操作期间,最期望的触觉响应可能是转向控制保持固定于最近的操作者设置。这种模式被称为“放置并保持”。然而,当在公路上高速行驶时,最理想的触觉响应具有主动的“转向中心”力。这种转向中心模式使操作员能够更好地在道路上高速行驶时进行控制。因此,系统600有利地可结合控制器,该控制器可在操作者本地的按钮(未示出)处操作,以根据正在执行的功能在“放下并保持”和“转向中心”模式之间切换。实现各种模式的触觉功能是通过can总线602从车辆发动机控制单元612传输的请求。该请求被转换成给驱动模块610的期望信号,并且反过来,电机模块618产生期望的响应。
73.在控制架构系统600的应用的另一个示例中,当操作作业车辆(例如,拖拉机或联合收割机)时,可能希望在经历试图使车辆转向的力时使用转向居中功能。例如,在山坡上驾驶拖拉机往往会导致下坡转弯,除非操作员将车轮偏向山坡。对于标准的转向中心触觉,操作者必须在转向手柄上保持恒定的力,以保持这种偏置。因此,系统600包括控制器,该控制器可在操作者本地的按钮处操作,以偏移转向中心位置,从而保持转向偏置,直到按钮被再次按下。在这种“保持偏置”模式下,操作员找到首选的转向偏置,推动中心偏置,消除手柄上的力,同时保持地面上的理想路径。
74.在一个实施例中,设想由操作者转向输入角度传感器604a-c产生的信号在被输出到车辆转向机构控制部件604、608、610、618之前被数学变换。如上所述,操作者可以使用与数学变换函数相关联的车辆转向模式选择开关来选择各种车辆转向特性。因此,操作者可
以在有限数量的预设转向行为之间进行选择。此外,隔离的交叉监控总线606允许电机驱动模块610向任一路径发送和接收诊断信息。
75.响应调谐
76.除了增值的数字通信和可选择的操作模式之外,对于诸如上述系统100的线控转向系统中的转向响应,还需要一种最佳的转向比功能。线控转向系统的一个优点是减少了转向输入设备的总角度运动。当操作诸如用于建筑或农业作业的作业车辆时,希望减少操作员控制器的总行程,以便减少操作员疲劳并提高工作循环效率。操作员输入总行程减少会导致转向过度敏感,尤其是在高速行驶时。在建筑设备行业以及农业、汽车和许多其他结合转向的行业中,使用术语“转向比”。
77.转向比由操作员输入行程(θ)除以转向系统的总允许铰接角度确定。转向系统,例如全液压系统,通常具有固定的转向比,其在高速下提供可接受的可控性。然而,工作车辆大多以低速运行。提供高速度下安全操纵的高转向比可能需要操作员在大部分工作时间内进行过多的控制运动。
78.线控转向系统可以包括可变转向比转向方法,因为在操作者输入控制和转向机构之间没有直接联系。该实施例利用了基于车速(v)的转向比补偿方法。转向比基于车辆的存储值被实时修改,该转向比旨在用于该车辆。这些存储值包括轴距和车辆履带尺寸以及最大期望径向加速度ar。在操作期间,控制器(例如,图6的608a和608b)使用以下等式计算最小允许转弯半径(r
min
)以满足最大允许ar:
79.r
min
=v2/ar
80.然后使用r
min
和存储的轴距和履带尺寸计算最大允许转向角由于将因速度增加而降低,并且操作员控制输入的全范围保持不变,转向比将增加。
81.一个优选实施例在冗余处理器(例如608a和608b)中结合了这些能力,并且在将冗余缩放输出发送到车辆控制器之前,在操作员控制内部提供合理性检查。在转向控制可以受益于在转向控制的“直线行驶”区域附近增加转向比的情况下,优选实施例包括使用正弦函数对输出进行整形的函数。该功能提高了输入设备行程中心附近的转向比,降低了行程末端附近的转向比。这种可变转向比功能对于方向盘和操纵杆应用都很有用。这些特征与车辆中使用的转向系统类型无关。这些包括,但不限于阿克曼、差动和铰接转向系统。此外,这些转向类型可以包括轮胎、履带或在地面或水中引导车辆的任何其他器件。通过引用将其全部内容并入本文,参见:susan g.hill、jason s.metcalfe和kaleb mcdowell的《利用转向功能改善线控车辆中人的表现》,由美国陆军研究实验室于2008年3月出版,参考出版物号为arl-tr-4387;1999年3月23日授予bohner等人的美国专利no.5,884,724;2003年9月23日授予bolourchi的美国专利no.6,625,530;和2004年4月1日公布的stout等人的美国专利公开no.2004/0064229。
82.现在参考图7a-d,几个图表有助于说明本公开的概念。图7a和7b分别是转向信号(图7a)和转向比(图7b)的传统线性曲线图750、752。每个曲线图750、752在水平轴上具有操作者控制输入角度(θ),其中在中心位置的转向是0
°
的θ角。转向信号图750是can计数,并且can计数在纵轴上修改。可以看出,图表线751对于can计数和修改的can计数是相同的,因为
没有进行修改。图表线751是线性线。
83.在图7b中,转向比曲线图752在纵轴上具有转向比。同样,图表线753是线性的,也基本上是水平的。每条图表线751、753在线性的情况下不是理想的性能曲线。
84.现在参考图7c和7d,示出了改进的转向信号图700(图7c)和改进的转向比图710(图7d)。使用缩放和整形来改进转向信号图700。转向比图710通过使用正弦整形函数来改进。以下公式是计算can计数修正值的代表性公式:
85.can mod=can-(a*(sin(180*θ/θmax))
86.其中a是振幅修正值,在车辆调谐期间选择。
87.再看转向can计数线702,该线仍然是线性的。然而,can计数修改线704不再是线性的。缩放和整形减少了对应的can计数,除了接近0
°
和40
°
的θ角。
88.从图7d的转向比图700中可以看出,转向比线712在整个行程范围内不再是均匀的,而是改进的连续可变形状。转向比线712的结果是因为转向比被成形为操作者输入角度的正弦函数。与传统的多项式曲线相比,正弦曲线的使用得到了改进,因为转向比的改变速率在曲线的每一端都被最小化。多项式函数会增加行程结束时转向比的变化率,这是不希望的。与分段线性方法相比,通过避免斜率的不连续性,使用正弦曲线也是有利的。因此,转向比线712在高θ角处显著减小,并且理想地在低θ角处增大。在一个实施例中,转向比在大约30
°
的θ角处大约为2.5,在大约5
°
的θ角处大约为6.6。因此,转向响应被动态调整以改善驾驶体验。
89.模块化系统
90.除了上述增值特征之外,在线控转向系统中,例如在本文描述的系统中,还需要一种成本有效、制造友好、易于配置的模块支撑组件。现在参考图8a和8b,示出了根据本发明的线控转向系统的两种不同构造的转向模块支撑组件800、800’的组装剖视图。组件800、800’被设计用于低扭矩(3nm)配置。例如,图8a的组件800可以被配置为与操纵杆一起使用,而图8b的组件800’可以被配置为与具有单转或多转能力的方向盘一起使用。由于使用了许多相同的部件,因此可以提高制造效率。
91.如图8a和8b所示,组件800、800’包括由壳体805、805’内的两个轴承820、820’支撑的转向轴812、812’。轴812、812’的远端809、809’从壳体805、805’延伸并包含花键810、810’(或槽、螺纹和/或其他特征),用于附接转向手柄(未示出),例如方向盘或操纵杆把手。远端809、809’变化以适应特定的应用,但是近端811、81g基本相同。
92.轴812、812’的近端811、81g设置在壳体805、805’内,并包含至少一个磁体830、830’。磁体830、830’包括附接到轴812、812’的极对(未示出),并且是bldc扭矩电机的转子部分的一部分。固定的定子802、802’围绕轴812、812’上的转子。
93.在示例中,印刷电路板(未示出)设置在壳体805、805’内,并垂直于轴812、812’定向。印刷电路板可以在磁体830、830’的可测磁场内包含至少一个磁性角位置传感器(例如霍尔效应、amr或gmr传感器)。印刷电路板还可以包含用于bldc电机换向的电子硬件和软件。印刷电路板和其他电子器件可以包含在联接到定子802、802’近端的盖832、832’内。
94.仍然参照图8a和8b,定子802、802’可以具有内部台阶部分803、803’,用于接收端盖818、818’的一部分。虽然端盖818、818’基本上包围定子802、802’的内部,但是端盖818、818’包括中心孔819、819’(图8d和8e),用于轴812、812’从中穿过。在图8b的应用中,端盖
818’的长度被选择为大于端盖818的长度。图8c-f分别示出了壳体805、805’、端盖818、818’和盖832、832’的详细视图。
95.如图8b所示,通过延伸轴812’和端盖818’,模块可以可选地添加到组件800、800’中。这种模块可以包括磁性制动器以补充用于需要虚拟行程终点止动件的应用的电机扭矩,或者包括用于机械行程终点止动件的机构(例如图5a和5b的盘502)。
96.这些模块可以根据操纵杆或方向盘系统的扭矩要求进行调整。模块还可以包括用于控制电机和/或制动扭矩的软件,以定制系统的“连接感觉”,包括作为操作者转向角输入变化率的函数的反扭矩和返回中心转向扭矩的量。该软件还可以被配置为将操作者输入的转向角转换成车辆转向机构角度的输出命令,以定制车辆转向响应,包括根据车辆速度和操作者转向角输入来调节转向比,以及根据车辆速度和最大允许车辆径向加速度来调节最大车辆转向机构响应。进出组件800、800’以及在组件800、800’内的信号通信可以是模拟的、pwm的或数字的(包括can、单边半字节传输(sent)或其他协议)。
97.现在参照图9a和9b,示出了根据本发明的替代线控转向装置900、900’的组装剖视图。装置900、900’被设计用于高扭矩(5nm)配置。例如,图9a的装置900可以被配置为与具有单转或多转能力的标准方向盘一起使用,而图9b的装置900’可以被配置为与具有断电制动器的方向盘一起使用。如图9a和9b所示,装置900、900’包括由壳体905、905’内的两个轴承920、920’支撑的转向轴912、912’。轴912、912’的远端909、909’从壳体905、905’延伸并包含花键910、910’(或槽、螺纹和/或其他特征),用于附接转向手柄(未示出),例如方向盘或操纵杆把手。设置在壳体905、905’内部的轴912、912’的近端911、91g包含磁体930、930’。磁体930、930’包括附接到轴912、912’的磁极对(未示出),并且是bldc扭矩电机的转子部分的一部分。定子902、902’围绕轴912、912’上的转子。
98.在示例中,印刷电路板(未示出)设置在壳体905、905’内,并垂直于轴912、912’定向。印刷电路板可以在磁体930、930’的可测磁场内包含至少一个磁性角位置传感器。印刷电路板还可以包含用于bldc电机换向的电子硬件和软件。印刷电路板和其他电子器件可以包含在联接到定子902、902’近端的盖932、932’内。
99.仍然参照图9a和9b,定子902、902’可以具有内部台阶部分903、903’,用于接收端盖918、918’的一部分。虽然端盖918、918’基本上包围定子902、902’的内部,但是端盖918、918’包括中心孔919、919’(图9c),用于轴912、912’从中穿过。如图9b所示,通过使用壳体延长部940来延长轴912’和端盖918’,可以可选地将模块添加到装置900、900’中。这种模块可以包括扭矩组件1000(下面更详细地描述),用于在断电期间向轴912’提供停止扭矩。端盖918、918’、壳体905、905’和壳体延伸部940的详细图示分别在图9c-e中示出。
100.可以设想,组件800、800’、900、900’形成为套件。套件可以包含多个不同的和可互换的部件,以使组件800、800’、900、900’的构造适应如上所示的不同应用。例如,多个轴、多个端盖和多个模块可以形成匹配的组。换句话说,在选择了期望的一个或多个模块(例如,断电制动器和/或行程终点止动件)后,选择合适的轴和端盖以及任何其他必要的部件,以将这些部件与壳体、磁体、印刷电路板、定子和其他部件组装在一起。因此,组件800、800’、900、900’是模块化的,并且可以采用许多不同于此处所示的布置。
101.关闭位置的扭矩
102.除了模块支撑组件之外,还需要一种可靠的、故障安全的机构来提供扭矩,以在车
辆电源关闭时将线控转向系统的方向盘保持就位。该机构对于方向盘和操纵杆应用都是有用的。该特征与车辆中使用的转向系统类型无关。这些包括,但不限于阿克曼、差动和铰接转向系统。此外,这些转向类型可以包括轮胎、履带或在地面或水中引导车辆的任何其他器件。
103.现在参考图10a和10b,分别示出了根据本发明的具有用于线控转向系统的断电制动机构的转向组件1000的分解图和组装截面图。当车辆关闭时,转向组件1000适于在操作者方向盘处产生阻力矩。如图10a和10b所示,转向组件1000的部件适于容纳在圆柱形壳体1002内,并被构造成使得线控转向系统的转向轴1012的远端1003从壳体1002伸出。远端1003带有螺纹以联接到方向盘等。轴1012沿着轴线a延伸并围绕轴线a旋转。组件1000包括两个轴承1020,以允许轴1012旋转,同时仍然支撑轴1012。
104.壳体1002还包括限定开口1054的平坦外圆周部分1052。壳体1002的开放远端1005适于接收保护端板1018。优选地,保护端板1018通过紧固件1007被栓接就位。端板1018基本上封闭了壳体1002的内部1007,但是包括用于轴1012从中穿过的中心孔1019。近端轴承1020支撑在壳体1002中,远端轴承1020支撑在端板1018中。柔性垫圈1024用于帮助将一个或两个轴承1020保持就位。
105.转向组件1000还包括具有周向锥齿轮部分1008、1010的相对的摩擦板1004、1006。每个摩擦板1004、1006具有轴1012延伸穿过的中心开口1009、1011。近端摩擦板1004通过销1013固定到轴1012。因此,近端摩擦板1004与轴1012一起旋转。轴1012限定了接收垫圈1022的环形凹槽1056。垫圈1022为近端摩擦板1004提供额外的支撑,以防止近端摩擦板1004在轴1012上向近端滑动。
106.第二远端摩擦板1006与轴1012同轴,但是可以围绕轴1012自由旋转。缓冲盘1058安装在相对的摩擦板1004、1006之间。偏压组件1014施加力以将远端摩擦板1006推向近端摩擦板1004。缓冲盘1058保持板1004、1006之间的分离,但是偏压组件1014的力足够大,使得当缓冲盘1059被挤压在板1004、1006之间时,板1004、1006变得连接在一起。因此,在正常操作中,板1004、1006都与轴1012一起旋转。
107.偏压组件1014包括压力套圈1060和压力环1062,它们通过在摩擦板1006上向远端延伸的弹簧导向套环1064插入中心开口1011。两个螺母1068安装在轴1012的螺纹肩部1066上。弹簧1070在螺母1068和压力环1062之间延伸,以提供将摩擦板1004、1006挤压在一起的力。该压缩力可以通过改变螺母1068固定在螺纹肩部1066上的位置、通过选择弹簧1070的强度、通过选择各种部件的材料等来调节。可以经由壳体1002中的孔1050a、1050b接近螺母1058进行调节。
108.仍然参照图10a和10b,转向组件1000还包括断电制动机构1080。如图10b所示,当车辆关闭时,断电制动机构1080安装在开口1054中,以选择性地将小齿轮1082插入相对的齿轮1008、1010之间。当小齿轮1082插入并接合摩擦板1004、1006时,摩擦板1004、1006沿相反方向旋转。由摩擦板1004、1006的反向旋转产生的摩擦扭矩对抗轴1012在任一方向上的旋转(例如,断电制动效果)。摩擦扭矩的大小可以通过选择摩擦板1004、1006的材料以及由偏压组件1014施加的力(例如,弹簧选择、部件的尺寸和形状等)来调节。可以理解的是,转向组件1000用作防故障装置,因为最大锁定扭矩可以设计成低于车辆转向的允许阈值。因此,在无动力条件下,转向会感觉“沉重”,但不会完全锁定,从而可以保持车辆控制。
109.断电制动机构1080还包括通过紧固件1086固定到壳体1002的安装块1084。小齿轮1082在导向套筒1088中滑动,导向套筒1088安装在形成于安装块1084中的孔1090中,如图10b中箭头b所示。弹簧1091安装在盖/螺线管组件1093中,以向小齿轮1082施加向下的力。因此,在没有施加动力的情况下,小齿轮1082在来自弹簧1070的力的作用下被迫接合在摩擦板1004、1006之间,弹簧1070将摩擦板1004、1006围绕小齿轮1082联接在一起。齿轮1008、1010的斜面和小齿轮1082的带齿端1092的楔形有助于插入。
110.当电源施加到断电制动机构1080时,螺线管(未示出)通电以缩回小齿轮1082。因此,在正常驾驶条件下,断电制动机构1080不会干扰与轴1012一起旋转的两个板1004、1006。
111.相关领域的普通技术人员将会理解,在替代实施例中,几个元件的功能可以由更少的元件或者单个元件来执行。类似地,在一些实施例中,任何功能元件可以执行比关于所示实施例描述的那些更少或不同的操作。此外,为了说明的目的而被示为不同的功能元件(例如,模块、电子器件、套筒、套圈、盘等)可以被结合在特定实施方式中的其他功能元件中。本文公开的所有专利、专利申请和其他参考文献都通过引用的方式全文并入本文。虽然已经针对优选实施例描述了主题技术,但是本领域技术人员将容易理解,在不脱离由所附权利要求限定的本发明的精神或范围的情况下,可以对主题技术进行各种改变和/或修改。例如,每个权利要求可以以多重引用的方式引用任何或所有权利要求,即使这些权利要求最初没有被要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1