电动车辆的防盗处理方法与流程
1.本发明是有关于一种电动车辆,且特别是一种电动车辆的防盗处理方法。
背景技术:
2.目前的防盗技术按照结构可分为两类:机械式防盗器和电子式防盗器,机械式防盗器主要是添加额外的车锁对车体进行锁定,但是用户在外出活动时要带上额外的车锁,造成外出不方便,不利于提升用户体验。电子式防盗器报通常只是单纯,独立的警报装置,在发出声响的过程中,被盗窃的车辆还是可以正常行驶的情况,其实对防盗并没有多大的帮助。
3.近年电子式防盗相关技术中,比较常见的是检测到盗骑者对电动车辆(例如滑板车)进行盗骑时,只是简单的将马达锁死,让盗窃者再移动电动车辆时,会有比较多的阻力而不易移动,但长时间使用这种方式将可能会导致马达线圈温度过高而对马达造成损伤,有待进一步改善。
技术实现要素:
4.本发明是有关于一种电动车辆的防盗处理方法,藉由产生马达反转阻力,增加窃盗的困难度。
5.根据本发明的一方面,提出一种电动车辆的防盗处理方法,包括下列步骤。开启一电子防盗功能。判断电动车辆是否移动。判断马达的温度是否大于一临界值。当电动车辆的马达的温度超过临界值时,反转马达以产生一反转阻力。
6.根据本发明的一方面,提出一种电动车辆的防盗处理方法,包括下列步骤。开启一电子防盗功能。判断电动车辆是否移动。判断马达的温度是否大于一临界值。当电动车辆的马达的温度超过临界值时,提供一非同步电角度至马达,以使该马达产生一震动噪音。
7.为了对本发明的上述及其他方面有更佳的了解,下文特举实施例,并配合附图详细说明如下:
附图说明
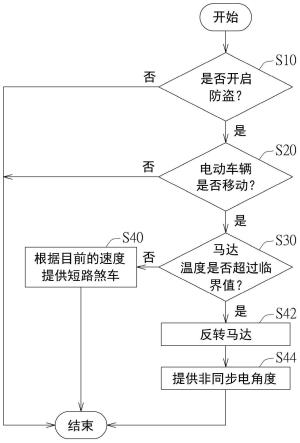
8.图1绘示依照本发明一实施例的电动车辆的防盗处理方法的示意图;
9.图2绘示依照本发明一实施例的电动车辆的防盗时机的示意图。
10.符号说明
11.s10:是否开启防盗
12.s20:电动车辆是否移动
13.s30:马达温度是否超过临界值
14.s40:根据目前的速度提供短路煞车
15.s42:反转马达
16.s44:提供非同步电角度
具体实施方式
17.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。
18.此外,所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施例中。在下面的描述中,提供许多具体细节从而给出对本技术的实施例的充分理解。然而,本领域的普通技术人员将意识到,可以实践本技术的技术方案不限定只有一个,亦可以采用其它的方法、装置、步骤等。在其它情况下,不详细示出或描述公知方法、装置、实现或者操作以避免模糊本技术的各方面。
19.请参照图1,其绘示依照本发明一实施例的电动车辆的防盗处理方法的示意图。本实施例的防盗处理方法主要是以电子电路方式防盗,可应用在轻型电动车或两轮的电动车上,例如体积小、重量轻的电动滑板车或电动自行车。
20.本实施例的电动车辆藉由本身的控制电路来控制马达产生马达反转阻力及/或马达震动噪音,来增加防盗的功效,不需再增加任何硬体电路。请参照图1,防盗处理方法包括下列步骤。步骤s10,开启一电子防盗功能。步骤s20,判断电动车辆是否移动。步骤s30,判断马达的温度是否大于一临界值。步骤s40,当电动车辆的马达的温度未超过一临界值时,马达根据目前的速度提供一短路煞车。步骤s42,当电动车辆的马达的温度超过一临界值时,反转马达以产生一反转阻力。另一方面,步骤s44,当电动车辆的马达的温度超过一临界值时,提供一非同步电角度至马达,以使马达产生一震动噪音。
21.上述的步骤s42、s44位于同一个判断步骤中,但可以独立操作、合并操作或与其他方式一并使用,本实施例的防盗处理方法不限定只有一种实施方式,亦可以有多种实施方式。
22.在步骤s10中,当开启电子防盗功能时,才会进行防盗处理,若未开启电子防盗功能,则以一般正常的功能操作电动车辆。电子防盗例如是对车体进行锁定,使电动车辆的龙头无法转动、油门无法启动或者轮胎煞车锁定而无法转动等,本实施例的电子防盗不限定只有一种实施方式,亦可以有多种实施方式。
23.在步骤s20中,当开启电子防盗功能之后,进一步判断电动车辆是否移动。判断电动车辆是否移动的方式例如以感测器侦测车轮是否转动、或侦测同步马达的相位是否改变。若判断电动车辆移动,表示可能发生偷盗行为。为了防止电动车辆被偷盗,在步骤s30中,当判断电动车辆移动时,进一步判断马达的温度是否大于一临界值。
24.在步骤s40中,当电动车辆的马达的温度未超过临界值时,马达可根据目前的速度提供一短路煞车,例如,在一实施例中,控制器可透过向马达提供一短路电流,使马达的三相线圈短路,以使马达的转动产生阻力,因此车轮被锁定而在短时间内无法转动或电动车辆无法顺利被牵动。此外,马达可根据目前的速度设定短路煞车的工作周期(duty cycle),工作周期例如是脉冲宽度调变(pulse-width modulation,pwm)的工作周期,藉由调整脉冲讯号的持续时间与脉冲总周期时间的比值,可得到不同的短路煞车。
25.然而,短路剎车是将马达的动能消耗在马达内部,若剎车时间过长,可能会有马达温度过高的问题。因此,虽然短路煞车产生的阻力可增加电动车辆被偷盗的困难度,但若剎车时间过长,可能会有马达温度过高而对马达造成损伤。
26.在步骤s42中,当电动车辆的马达的温度超过临界值时,为了避免马达温度过高而
造成损伤,马达不再提供短路煞车,而是改以一般正常方式控制马达,但需反转马达以对路面产生一反转阻力。也就是说,马达转动的方向改为与电动车辆的移动方向相反,且车轮对路面产生反转阻力而使电动车辆无法向前转动,如此不仅马达温度不会过高,且偷盗者也无法顺利牵动电动车辆,因而可增加电动车辆被偷盗的困难度。
27.另一方面,在步骤s44中,当电动车辆的马达的温度超过临界值时,为了避免马达温度过高而造成损伤,马达不再提供短路煞车,而是改为提供一非同步电角度至马达,以使马达产生一震动噪音。
28.本实施例的马达可为永磁同步伺服马达(permanent-magnet synchronous motor,pmsm)是指一种转子用永久磁铁代替绕线的同步马达。本实施例的马达亦可为直流无刷马达。因此,本实施例的马达不限定只有一种实施类型,亦可以有多种实施类型。
29.一般而言,为了实现永磁同步马达的电磁定向控制,必须知道马达转子的电角度旋向及初始位置。通过判断定子电流的角度(简称电角度)和转子角度的关系,使定子电流的角度接近转子角度,即可控制永磁同步马达正常启动。然而,若提供一非同步电角度至马达,将使定子电流的角度无法收敛至转子角度,使得马达一直处于微震状态,因而发出震动噪音。上述的非同步电角度是指马达的定子电流的角度与转子角度之间具有一误差角度,且误差角度可由马达控制器提供至永磁同步马达,以持续保持永磁同步马达产生震动噪音。
30.本发明上述实施例的电动车辆的防盗处理方法,可应用在轻型电动车或两轮的电动车上,例如体积小、重量轻的电动滑板车或电动自行车,以达到主动防盗及吓阻的功效。例如,请参照图2,其绘示依照本发明一实施例的电动车辆的防盗时机的示意图。在初始阶段透过短路煞车方式,来让盗窃者在牵动滑板车时,马达会有一定的阻力而让盗窃者比较难以牵动滑板车,而当在t1时间点侦测到马达温度达到设定的临界值时,就停止短路煞车方式;在第二阶段,改以正常马达控制方式但是以反向的速度来让马达反转产生一定的阻力,再加上使用非同步电角度,目的是产生一定的阻力,也让马达产生一定的噪音,来达到引起路人注意而让窃盗者心生恐惧而有放弃窃盗之意。
31.综上所述,虽然本发明已以实施例揭露如上,然其并非用以限定本发明。本发明所属技术领域的普通技术人员,在不脱离本发明的精神和范围内,当可作各种的更动与润饰。因此,本发明的保护范围当视所附的权利要求范围所界定者为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1