一种磁力可控的爬壁吸附机构和爬壁机器人的制作方法
1.本发明涉及机器人技术领域,具体涉及一种磁力可控的爬壁吸附机构和爬壁机器人。
背景技术:
2.爬壁机器人作为一种壁面移动机器人,结合了地面机器人的移动方式和壁面附着能力,将运动以及应用范围拓展至垂直立面空间内。
3.目前,爬壁机器人广泛用于反恐侦察、楼宇壁面清洁、火电站锅炉检测等应用需求。因此,其结构特点需要集成壁面吸附能力、平面移动能力,以及越障能力。由于目前该类机器人的吸附组件大多采用永磁铁吸附,较难控制机器人与工作壁面之间的吸附作用力,使得机器人的越障能力较差,面对一些错综复杂的工作壁面时,该类机器人无法提供稳定的运动性能。
4.申请号为201420356750.8的中国专利“一种用于tofd扫查架的磁力可控磁轮组件”提出了一种可控磁轮组件,通过对磁轮内部磁路的改变控制磁轮组件的磁力,来解决磁轮吸附力过大或过小带来的高空操作安全问题,但该磁轮的磁力控制是通过手动旋转旋钮,实现磁力两档调节,对机器人高空作业实用性不强。
5.申请号为201610350077.0的中国专利“一种越障爬壁机器人”提出一种越障爬壁机器人,该机器人类似于足式机器人,通过对上、下机架的磁吸附单元的磁力控制及运动控制实现一个机架吸附,另一个机架运动的逻辑动作关系,实现较强的越障能力,但整体的控制动作复杂,运动效率比较低。
6.申请号为201910850161.2的中国专利“越障爬壁机器人复合式变磁力吸附模块”提出一种用于爬壁机器人的变磁力吸附模块,该模块是通过丝杆的上下运动实现磁铁与工作壁面之间的距离变化,从而控制磁力大小,该种结构对机器人本体的空间有一定要求,在实际应用中控制动作比较繁琐。
技术实现要素:
7.针对现有技术中存在的上述技术问题,本发明提供一种磁力可控的爬壁吸附机构和爬壁机器人,结构简单,方便控制磁力的大小,控制吸附力的大小。
8.本发明公开了一种爬壁吸附机构,包括磁吸附组件,所述磁吸附组件包括软磁体,所述软磁体两侧分别设有左磁轭和右磁轭,所述软磁体上还设有电磁线圈。
9.优选的,磁吸附组件还包括设置在左磁轭和右磁轭之间的上隔磁块和下隔磁块,所述软磁体夹持在上隔磁块和下隔磁块之间,所述左磁轭和右磁轭一侧分别设有牛眼万向轮。
10.优选的,爬壁吸附机构还包括设置在所述磁吸附组件上侧的浮动适应组件,所述浮动适应组件包括设置在左磁轭和右磁轭一侧的固定板,所述固定板上设有连接弹簧。
11.本发明还提供一种安装有上述的爬壁吸附机构的爬壁机器人,包括车架,所述爬
壁吸附机构设置在车架一侧,所述车架上还设有行走机构。
12.优选的,所述车架包括前车架和后车架,前车架和后车架分别设有的爬壁吸附机构,所述前车架和后车架之前设有越障机构,所述越障机构包括第一连杆,所述第一连杆两端分别可旋转地安装在前车架外侧和后车架外侧。
13.优选的,所述越障机构还包括前关节固定座和后关节固定座,所述前关节固定座安装在前车架一侧,所述后关节固定座安装在后车架一侧,
14.所述第一连杆一侧固定有第一转动销,第一转动销可旋转地安装在前关节固定座外侧,安装在前关节固定座一侧的前关节电机驱动所述第一转动销;
15.所述第一连杆另一侧固定有第三转动销,第三转动销可旋转地安装在后关节固定座外侧,安装在后关节固定座一侧的后关节电机驱动所述第三转动销。
16.优选的,所述越障机构还包括第二连杆,所述前关节固定座上设有前连接槽,所述后关节固定座上设有后连接槽,所述前连接槽和后连接槽的朝向相反,所述第二连杆的两端分别可旋转地安装在前连接槽和后连接槽的侧壁上。
17.优选的,所述行走机构包括安装在后车架上的驱动轮组件和安装在前车架上的随动轮组件,
18.驱动轮组件包括安装在后车架上的电机连接板,所述电机连接板一侧设有驱动轮、另一侧设有驱动电机,所述驱动电机驱动所述驱动轮;
19.所述随动轮组件包括安装在前车架上的随动轮固定板,所述随动轮固定板上设有随动轮转动轴,所述随动轮转动轴两侧分别设有全向轮。
20.优选的,所述前车架和后车架一侧分别设有吸附槽,所述吸附槽上设有直线导柱,连接弹簧一端安装在直线导柱上,连接弹簧另一端安装在固定板上,所述固定板安装在左磁轭和右磁轭一侧。
21.优选的,本发明的爬壁机器人还包括安装在车架上的把手和电控盒。
22.与现有技术相比,本发明的有益效果为:软磁体具有可充退磁的特点,软磁体本身具有第一磁场,电磁线圈产生第二磁场,第一磁场通过左磁轭和右磁轭向壁面传递;使第二磁场与第一磁场的方向相同,第二磁场对软磁体进行充磁,加大第一磁场的吸附力;使第二磁场与第一磁场的方向相反时,软磁体退磁,第一磁场的吸附力降低,因而可以通过调节电磁线圈的电流大小和电流方向调节第一磁场吸附力的大小。
附图说明
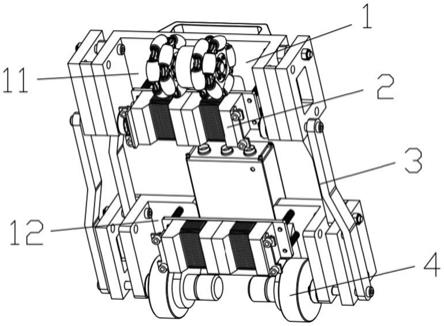
23.图1是本发明的爬壁机器人结构示意图;
24.图2是本发明的爬壁吸附机构结构示意图;
25.图3是磁吸附组件的结构示意图;
26.图4是磁吸附组件的工作原理图;
27.图5是行走机构的结构示意图;
28.图6是越障机构的结构示意图;
29.图7是爬壁机器人越障运动的示意图;
30.图8是爬壁机器人的附件结构示意图。
31.附图标记:1车架,11前车架,12后车架,15把手,16电控盒,17壁面,
32.2爬壁吸附机构,
33.21浮动适应组件,2101直线导柱,2102连接弹簧,2103固定板,
34.22磁吸附组件,2201左磁轭,2202软磁体,2203右磁轭,2204上隔磁块,2205下隔磁块,2206电磁线圈,2104牛眼万向轮,2105万向轮安装板,2106固定螺母,
35.3越障机构,31前关节固定座,32后关节固定座,33第一转动销,34第二转动销,35第三转动销,36第四转动销,37第一连杆,38第二连杆,39前关节电机,310后关节电机,311锁紧螺母,312前连接槽,313后连接槽,
36.4行走机构,
37.41驱动轮组件,4101左驱动轮,4102左电机连接板,4103左电机,4104右驱动轮,4105右电机连接板,4106右电机,
38.42随动轮组件,4201全向轮,4202随动轮固定板,4204随动轮转动轴。
具体实施方式
39.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
40.下面结合附图对本发明做进一步的详细描述:
41.一种爬壁吸附机构,如图1
‑
3所示,包括磁吸附组件21,磁吸附组件21包括软磁体2202,软磁体2202两侧分别设有左磁轭2201和右磁轭2203,软磁体2202上还设有电磁线圈2206。
42.软磁体2202具有可充退磁的特点,如图4所示,左图表示软磁体本身具有第一磁场s1‑
n1,右图示出了电磁线圈2206产生第二磁场s2‑
n2,第一磁场通过左磁轭2201和右磁轭2203向壁面17传递;使第二磁场与第一磁场的方向相同时,第二磁场对软磁体2202进行充磁,加大第一磁场的吸附力;使第二磁场与第一磁场的方向相反时,软磁体2202退磁,第一磁场的吸附力降低,因而可以通过电磁线圈的电流大小和电流方向调节第二磁场,从而调节第一磁场吸附力的大小;另一方面,在爬壁吸附机构2吸附在壁面17时,即使电磁线圈断电,软磁体仍然保持第一磁场,而不会因为断电掉落。
43.如图3所示,磁吸附组件21还包括设置在左磁轭2201和右磁轭2203之间的上隔磁2204块和下隔磁块2205,软磁体2202夹持在上隔磁2204块和下隔磁块2205之间,左磁轭2201和右磁轭2203一侧分别设有牛眼万向轮2104。其中,软磁体2202与上隔磁之间,以及软磁体与下隔磁之间可以设有间隙。在吸附时,牛眼万向轮2104与壁面接触,利于磁吸附组件21与壁面17的相互运动。在一个具体实施例中,左磁轭2201和右磁轭2203一侧分别设有万向轮安装板2105,牛眼万向轮2104通过固定螺母2106安装在万向轮安装板2104上。
44.如图2所示,爬壁吸附机构2还可以包括设置在磁吸附组件上侧的浮动适应组件21,浮动适应组件21包括设置在左磁轭2201和右磁轭2203一侧的固定板2101,固定板2101上设有连接弹簧2102。连接弹簧2102安装在的爬壁机器人的车架1上,连接弹簧2102起缓冲作用。一个具体实施例中,前车架11和后车架12一侧分别设有吸附槽,所述吸附槽上设有直线导柱2101,连接弹簧2102一端安装在直线导柱2101上,连接弹簧2103另一端安装在固定
板2101上,固定板2101安装在左磁轭2201和右磁轭2203一侧。直线导柱一方面起固定作用,另一方面直线导柱2101一端设置在连接弹簧2103内侧,起导向作用,防止吸附机构偏离位置。
45.如图1和图8所示,本发明的爬壁机器人包括车架11,爬壁吸附机构2设置在车架11一侧,车架11一侧还设有行走机构4。爬壁机器人通过吸附机构吸附2在壁面上,行走机构4为爬壁机器人的运动提供动力。
46.如图6,车架11包括前车架11和后车架12,前车架11和后车架12之前设有越障机构3,前车架11和后车架12分别设有的爬壁吸附机构2,越障机构3包括第一连杆37,第一连杆37两端分别可旋转地安装在前车架11外侧和后车架12外侧。
47.图7示出了一种越障过程,a图表示,爬壁机器人遇到障碍,无法直接通过,图中靠近障碍一侧为前车架,远离障碍一侧为后车架,此时调节与前车架11连接的磁吸附组件22磁力到最大,使前车架11牢牢吸附在壁面上,调节后车架12的磁吸附组件磁力大小为零。b图表示,后车架12通过第一连杆37绕前车架11旋转,使后车架12翻转到障碍的另一侧。c图表示,调节后车架12的磁吸附组件磁力到最大,使后车架牢牢吸附在壁面上,调节前车架11的磁吸附组件磁力大小为零。d图表示,前车架11通过第一连杆绕后车架12旋转,使前车架翻转到后车架另一侧。e图表示,前车架翻转后保持与壁面的吸附,此时可以调节前车架和后车架与劈面的吸附力,吸附力使行走机构与壁面之间形成摩擦力,使行走机构在壁面上运动。因此,通过越障机构3使的爬壁机器人具备较强的越障能力,能够适应各种复杂的工作壁面环境。
48.如图6所示,第一连杆可以通过电机进行驱动。例如:越障机构3还包括前关节固定座31和后关节固定座32,前关节固定座31安装在前车架11一侧,后关节固定座安装在后车架11一侧,第一连杆37一侧固定有第一转动销33,第一转动销33可旋转地安装在前关节固定座31外侧,安装在前关节固定座31一侧的前关节电机39驱动第一转动销33;第一连杆37另一侧固定有第三转动销35,第三转动销35可旋转地安装在后关节固定座32外侧,安装在后关节固定座32一侧的后关节电机310驱动第三转动销35,从而驱动第一连杆37两端旋转。但不限于此,可以使用其它的方式驱动第一连杆两侧旋转。
49.在一个具体实施例中,越障机构3还包括第二连杆38,前关节固定座31上设有前连接槽312,后关节固定座32上设有后连接槽313,前连接槽312和后连接槽313的开口朝向相反,第二连杆38的两端分别可旋转地安装在前连接槽312和后连接槽313的侧壁上。第二连杆38使爬壁机器人翻转运动时,更加稳定,但也会限制机器人的翻转空间,如图8所示,爬壁机器人左右两侧可以分别设有一个第一连杆37和第二连杆38。其中,第一连杆37可以通过锁紧螺母311固定在第一转动销33或第三转动销35上;前关节电机39的驱动轴通过平键与第一转动销33连接,从而驱动第一转动销33;后关节电机310的驱动轴通过平键与第三转动销35连接,从而驱动第三转动销35;第二连杆38通过第二转动销34可旋转地安装在前关节固定座31上,第二连杆38通过第四转动销36可旋转地安装在后关节固定座32上。
50.图5示出了一个具体的行走机构4,包括安装在后车架12上的驱动轮组件41和安装在前车架11上的随动轮组件42,驱动轮组件41包括安装在后车架12上的电机连接板,电机连接板一侧设有驱动轮、另一侧设有驱动电机,所述驱动电机驱动所述驱动轮;具体的,后车架12上两侧可以分别设有左电机连接板4102和右电机连接板4105,左电机连接板4102一
侧设有左驱动轮4101、另一侧设有左电机4103,左电机4103驱动左驱动轮4101,右电机连接板4105一侧设有右驱动轮4104、另一侧设有右电机4106,右电机驱动所述右驱动轮。所述随动轮组件42包括安装在前车架11上的随动轮固定板4202,随动轮固定板4202上设有随动轮转动轴4204,所述随动轮转动轴4204两侧分别设有全向轮4201。但不限于此,也可以在前车架11上安装驱动轮组件,通过两组驱动轮组件驱动车架行走,通过驱动轮设置差速,调节行走方向。
51.在一个具体实施例中,所述电机连接板上设有旋转轴,旋转轴一端与驱动轮固定连接、另一端与驱动电机的输出轴连接,驱动电机通过旋转轴驱动所述驱动轮。但电机驱动行驶轮为常用技术,本申请中不再赘述。
52.本发明的爬壁机器人通过的爬壁吸附机构2、越障机构3和行走机构4之间的配合,使爬壁机器人具备轮足复合运动的特性,在普通导磁平面运动时,机器人通过行走机构完成运动功能,在遇到焊缝、铆钉等高凸起的障碍时,机器人调节前后两组的爬壁吸附机构的磁吸附力,采用越障机构3来跨越障碍。使爬壁机器人具备两种运动模式,相比单一足式运动方式,具有更快的速度性能与更简便的控制要求。
53.如图8所示,车架1上可以安装有把手15和电控盒16。但不限于此,还可以根据工作需求,搭载其他模组,扩展机器人功能。
54.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1