一种多形态多行走方式的工业机器人
1.本发明涉及一种工业机器人技术领域,尤其涉及一种多形态多行走方式的工业机器人。
背景技术:
2.机器人已经广泛应用于各行各业,在一些餐厅已经开始使用机器人作为餐厅服务员为客人上菜,现有技术中的上菜机器人按行走方式可分为轮式机器人、腿式机器人、履带式机器人等多种机器人,但是,在很多餐厅中,地形较为复杂,一些餐厅分上下两层,现有技术中的机器人就无法完成上下楼送菜的服务,只能在同一层进行送菜,而送菜机器人的行走路线通常为厨房出餐口到客人的指定餐桌位置,一般餐厅也只设有一个厨房,因此,现有技术中的上菜机器人不适用于这种餐厅,此外,餐厅的地面通常比较滑,为了防止上菜时菜汤洒出,因此,对上菜机器人的制动性能和稳定性能要求较高。
技术实现要素:
3.为了解决上述问题,本发明提供了一种行走状态稳定、能够避免行走过程中菜汤洒出、能够切换多种行走形态的工业机器人。
4.本发明的技术方案:一种多形态多行走方式的工业机器人,包括用于放置菜品的设备基座、连接于设备基座的左右两侧的轮腿装置和用于控制轮腿装置切换行走形态的控制装置,所述轮腿装置包括铰链连接于设备基座的第一轮腿、铰链连接于第一轮腿的第二轮腿、铰链连接于第二轮腿的第三轮腿、用于驱动第一轮腿进行旋转运动的第一旋转电机、用于驱动第二轮腿进行旋转运动的第二旋转电机和用于驱动第三轮腿进行旋转运动的第三旋转电机,所述控制装置可控制两个轮腿装置配合完成步态模拟动作,所述第三轮腿上设有镂空槽和位于镂空槽内壁的若干个第一滑动槽,所述第一滑动槽上分别设有滑块、连接于滑块的连接轴、连接于连接轴的滑轮、用于驱动滑块在竖直方向滑动的第一驱动电机和用于驱动滑轮运动的伺服电机,所述第一旋转电机、第二旋转电机、第三旋转电机、第一驱动电机、伺服电机分别与控制装置电连接。
5.采用上述技术方案,机器人首先在厨房出餐口等待,待厨师把菜烧完后,将菜品放置在设备基座上,然后通过控制装置控制机器人从出餐口移动至客户的餐桌,在平路上行走时,控制装置控制第一旋转电机、第二旋转电机、第三旋转电机分别驱动第一轮腿、第二轮腿和第三轮腿进行一定角度的旋转,使得第一轮腿与设备基座呈90度夹角,第三轮腿的轴向方向与地面平行,然后通过第一驱动电机驱动滑块竖直向下滑动,使得滑轮能够与地面接触,然后通过伺服电机驱动滑轮转动,使得机器人能够平稳地前行,当机器人需要爬楼梯时,通过控制装置可控制两个轮腿装置配合完成步态模拟动作,机器人可完成爬楼梯工作,这样机器人就可以完成在有上下层的餐厅送餐的工作,且能够保证行走状态稳定、能够避免行走过程中菜汤洒出。
6.本发明的进一步设置:所述第一轮腿和第二轮腿上分别设有固定凹槽,所述第一
轮腿和第二轮腿之间设有弹片,所述弹片两端分别固定连接于第一轮腿和第二轮腿的固定凹槽上,所述弹片呈圆弧形。
7.采用上述技术方案,由于第一轮腿和第二轮腿之间设有弹片,弹片两端分别固定连接于第一轮腿和第二轮腿的固定凹槽上,且弹片呈圆弧形,当第一轮腿和第二轮腿发生一定角度的旋转时,弹片会给第一轮腿和第二轮腿之间提供缓冲力,从而避免旋转速度过大,冲击力过强,导致机器人站立不稳定。
8.本发明的进一步设置:所述第三轮腿上设有限位槽、连接于限位槽的限位滑块和用于驱动限位滑块滑动的第二驱动电机,所述限位槽的开口方向与第三轮腿与地面接触面方向相同,所述限位滑块上设有防滑垫。
9.采用上述技术方案,当机器人处于滑行模式时,即第三轮腿的轴向方向与地面平行且滑轮与地面接触状态,当需要紧急制动时,通过控制装置控制第二驱动电机驱动限位滑块向下滑动,通过防滑垫加大本设备与地面的摩擦力,从而保证行走状态稳定,避免制动不及时与客人碰撞。
10.本发明的进一步设置:所述设备基座包括安装底板、固定连接于安装底板上的三个固定板和连接于固定板的置菜板,位于左右两侧的固定板上设有若干个位置相对应的第二滑动槽,所述置菜板滑动连接于第二滑动槽,所述置菜板上设有用于限制菜盘位置的定位槽,所述置菜板的数量与第二滑动槽的数量相对应,所述置菜板底部设有若干个装夹孔,所述安装底板上设有连接基座、滑动连接于连接基座的连接杆、连接于连接杆的旋转轴、固定连接于旋转轴的第一机械臂、活动连接于第一机械臂的第二机械臂、连接于第二机械臂的若干个装夹元件、用于驱动连接杆进行竖直方向运动的第三驱动电机、用于驱动旋转轴进行旋转的第四旋转电机、用于驱动第二机械臂运动的第四驱动电机和用于驱动装夹元件运动的第五驱动电机,所述第二机械臂上设有若干个第三滑动槽,所述装夹元件滑动连接于第三滑动槽,所述装夹元件与装夹孔的形状大小相适配。
11.采用上述技术方案,当机器人带着菜品走到指定客户的餐桌后,通过第三驱动电机带动连接杆在竖直方向运动,直至第二机械臂所在高度与对应的置菜板高度相对应,然后,通过第四旋转电机驱动旋转轴旋转一定角度,使得第二机械臂朝向置菜板,然后通过第四驱动电机驱动第二机械臂在第一机械臂上滑动,使得装夹元件的位置与装夹孔的位置相对应,然后通过第五驱动电机驱动装夹元件在第三滑动槽上进行竖直向上的运动,使得装夹元件插入装夹孔中,然后第四驱动电机反转使得第二机械臂复位,然后第四旋转电机驱动旋转轴旋转一定角度,使得第二机械臂对准餐桌位置,然后通过第三驱动电机驱动连接杆运动到合适的高度,使得菜品方便交到客人手中,这样进一步提高了机器人的送菜服务能力。
12.本发明的进一步设置:所述控制装置包括信号接收模块、路线规划模块和信号发送模块,所述信号发送模块每一块置菜板均有对应的编号,所述信号接收模块与路线规划模块电连接,所述路线规划模块与信号发送模块电连接,所述信号发送模块分别与第一旋转电机、第二旋转电机、第三旋转电机、第四旋转电机、第一驱动电机、第二驱动电机、第三驱动电机、第四驱动电机、第五驱动电机、伺服电机电连接。
13.采用上述技术方案,由于控制装置包括信号接收模块、路线规划模块和信号发送模块,且信号发送模块每一块置菜板均有对应的编号,在厨房出餐口时,可以将置菜板的编
号与用户对应的餐桌号配对,然后通过路线规划模块规划出前往对应餐桌的路线,然后路线规划模块向信号发送模块传输电信号,信号发送模块接收到电信号后,根据路线控制第一旋转电机、第二旋转电机、第三旋转电机、第四旋转电机、第一驱动电机、第二驱动电机、第三驱动电机、第四驱动电机、第五驱动电机、伺服电机分别完成不同的动作,直至菜品移动至客户手中。
附图说明
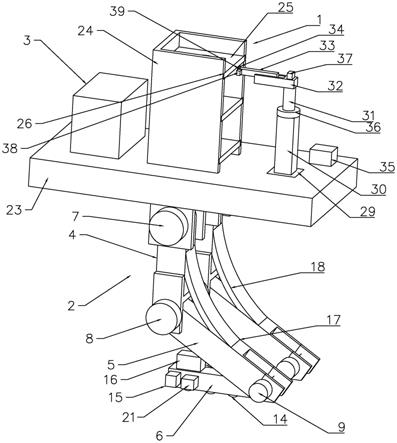
14.附图1为本发明具体实施例的一种多形态多行走方式的工业机器人的结构示意图。
15.附图2为本发明具体实施例的一种多形态多行走方式的工业机器人中第三轮腿的结构示意图。
16.附图3为本发明具体实施例的一种多形态多行走方式的工业机器人中置菜板的结构示意图。
17.附图4为本发明具体实施例的一种多形态多行走方式的工业机器人中置菜板的结构示意图。
18.1-设备基座,2-轮腿装置,3-控制装置,4-第一轮腿,5-第二轮腿,6-第三轮腿,7-第一旋转电机,8-第二旋转电机,9-第三旋转电机,10-镂空槽,11-第一滑动槽,12-滑块,13-连接轴,14-滑轮,15-第一驱动电机,16-伺服电机,17-固定凹槽,18-弹片,19-限位槽,20-限位滑块,21-第二驱动电机,22-防滑垫,23-安装底板,24-固定板,25-置菜板,26-第二滑动槽,27-定位槽,28-装夹孔,29-连接基座,30-连接杆,31-旋转轴,32-第一机械臂,33-第二机械臂,34-装夹元件,35-第三驱动电机,36-第四旋转电机,37-第四驱动电机,38-第五驱动电机,39-第三滑动槽。
具体实施方式
19.如图1-4所示,一种多形态多行走方式的工业机器人,包括用于放置菜品的设备基座1、连接于设备基座1的左右两侧的轮腿装置2和用于控制轮腿装置2切换行走形态的控制装置3,所述轮腿装置2包括铰链连接于设备基座1的第一轮腿4、铰链连接于第一轮腿4的第二轮腿5、铰链连接于第二轮腿5的第三轮腿6、用于驱动第一轮腿4进行旋转运动的第一旋转电机7、用于驱动第二轮腿5进行旋转运动的第二旋转电机8和用于驱动第三轮腿6进行旋转运动的第三旋转电机9,所述控制装置3可控制两个轮腿装置2配合完成步态模拟动作,所述第三轮腿6上设有镂空槽10和位于镂空槽10内壁的若干个第一滑动槽11,所述第一滑动槽11上分别设有滑块12、连接于滑块12的连接轴13、连接于连接轴13的滑轮14、用于驱动滑块12在竖直方向滑动的第一驱动电机15和用于驱动滑轮14运动的伺服电机16,所述第一旋转电机7、第二旋转电机8、第三旋转电机9、第一驱动电机15、伺服电机16分别与控制装置3电连接。
20.机器人首先在厨房出餐口等待,待厨师把菜烧完后,将菜品放置在设备基座1上,然后通过控制装置3控制机器人从出餐口移动至客户的餐桌,在平路上行走时,控制装置3控制第一旋转电机7、第二旋转电机8、第三旋转电机9分别驱动第一轮腿4、第二轮腿5和第三轮腿6进行一定角度的旋转,使得第一轮腿4与设备基座1呈90度夹角,第三轮腿6的轴向
方向与地面平行,然后通过第一驱动电机15驱动滑块12竖直向下滑动,使得滑轮14能够与地面接触,然后通过伺服电机16驱动滑轮14转动,使得机器人能够平稳地前行,当机器人需要爬楼梯时,通过控制装置3可控制两个轮腿装置2配合完成步态模拟动作,机器人可完成爬楼梯工作,这样机器人就可以完成在有上下层的餐厅送餐的工作,且能够保证行走状态稳定、能够避免行走过程中菜汤洒出。
21.所述第一轮腿4和第二轮腿5上分别设有固定凹槽17,所述第一轮腿4和第二轮腿5之间设有弹片18,所述弹片18两端分别固定连接于第一轮腿4和第二轮腿5的固定凹槽17上,所述弹片18呈圆弧形。
22.由于第一轮腿4和第二轮腿5之间设有弹片18,弹片18两端分别固定连接于第一轮腿4和第二轮腿5的固定凹槽17上,且弹片18呈圆弧形,当第一轮腿4和第二轮腿5发生一定角度的旋转时,弹片18会给第一轮腿4和第二轮腿5之间提供缓冲力,从而避免旋转速度过大,冲击力过强,导致机器人站立不稳定。
23.所述第三轮腿6上设有限位槽19、连接于限位槽19的限位滑块20和用于驱动限位滑块20滑动的第二驱动电机21,所述限位槽19的开口方向与第三轮腿6与地面接触面方向相同,所述限位滑块20上设有防滑垫22。
24.当机器人处于滑行模式时,即第三轮腿6的轴向方向与地面平行且滑轮14与地面接触状态,当需要紧急制动时,通过控制装置3控制第二驱动电机21驱动限位滑块20向下滑动,通过防滑垫22加大本设备与地面的摩擦力,从而保证行走状态稳定,避免制动不及时与客人碰撞。
25.所述设备基座1包括安装底板23、固定连接于安装底板23上的三个固定板24和连接于固定板24的置菜板25,位于左右两侧的固定板24上设有若干个位置相对应的第二滑动槽26,所述置菜板25滑动连接于第二滑动槽26,所述置菜板25上设有用于限制菜盘位置的定位槽27,所述置菜板25的数量与第二滑动槽26的数量相对应,所述置菜板25底部设有若干个装夹孔28,所述安装底板23上设有连接基座29、滑动连接于连接基座29的连接杆30、连接于连接杆30的旋转轴31、固定连接于旋转轴31的第一机械臂32、活动连接于第一机械臂32的第二机械臂33、连接于第二机械臂33的若干个装夹元件34、用于驱动连接杆30进行竖直方向运动的第三驱动电机35、用于驱动旋转轴31进行旋转的第四旋转电机36、用于驱动第二机械臂33运动的第四驱动电机37和用于驱动装夹元件34运动的第五驱动电机38,所述第二机械臂33上设有若干个第三滑动槽39,所述装夹元件34滑动连接于第三滑动槽39,所述装夹元件34与装夹孔28的形状大小相适配。
26.当机器人带着菜品走到指定客户的餐桌后,通过第三驱动电机35带动连接杆30在竖直方向运动,直至第二机械臂33所在高度与对应的置菜板25高度相对应,然后,通过第四旋转电机36驱动旋转轴31旋转一定角度,使得第二机械臂33朝向置菜板25,然后通过第四驱动电机37驱动第二机械臂33在第一机械臂32上滑动,使得装夹元件34的位置与装夹孔28的位置相对应,然后通过第五驱动电机38驱动装夹元件34在第三滑动槽39上进行竖直向上的运动,使得装夹元件34插入装夹孔28中,然后第四驱动电机37反转使得第二机械臂33复位,然后第四旋转电机36驱动旋转轴31旋转一定角度,使得第二机械臂33对准餐桌位置,然后通过第三驱动电机35驱动连接杆30运动到合适的高度,使得菜品方便交到客人手中,这样进一步提高了机器人的送菜服务能力。
27.所述控制装置3包括信号接收模块、路线规划模块和信号发送模块,所述信号发送模块每一块置菜板25均有对应的编号,所述信号接收模块与路线规划模块电连接,所述路线规划模块与信号发送模块电连接,所述信号发送模块分别与第一旋转电机7、第二旋转电机8、第三旋转电机9、第四旋转电机36、第一驱动电机15、第二驱动电机21、第三驱动电机35、第四驱动电机37、第五驱动电机38、伺服电机16电连接。
28.由于控制装置3包括信号接收模块、路线规划模块和信号发送模块,且信号发送模块每一块置菜板25均有对应的编号,在厨房出餐口时,可以将置菜板25的编号与用户对应的餐桌号配对,然后通过路线规划模块规划出前往对应餐桌的路线,然后路线规划模块向信号发送模块传输电信号,信号发送模块接收到电信号后,根据路线控制第一旋转电机7、第二旋转电机8、第三旋转电机9、第四旋转电机36、第一驱动电机15、第二驱动电机21、第三驱动电机35、第四驱动电机37、第五驱动电机38、伺服电机16分别完成不同的动作,直至菜品移动至客户手中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1