一种户外农田机器人运载装置
1.本发明涉及运载设备技术领域,具体是一种户外农田机器人运载装置。
背景技术:
2.农田又称为耕地,在地理学上是指可以用来种植农作物的土地。
3.现在农业工作中会使用到机器人帮助农民进行工作,机器人在工作过程中可能会由于一些问题造成机器人停机,此时就需要工作人员将机器人运回,但是由于机器人体积较大,重量较重,需要多名工作人员进行抬起,费时费力,且浪费人力资源,因此,亟需一种户外农田机器人运载装置来解决上述问题。
技术实现要素:
4.本发明实施例的目的在于提供一种户外农田机器人运载装置,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种户外农田机器人运载装置,包括车体,还包括:驱动件,与车体连接;移动机构,一端与驱动件输出端连接,另一端与车体连接,所述移动机构包括移动轮、升降组件和限位组件,所述升降组件一端与驱动件输出端连接,另一端与移动轮连接,所述限位组件一端与车体连接,另一端与升降组件连接;夹持机构,一端与驱动件输出端连接,另一端与车体连接,所述夹持机构包括联动组件、动力组件和夹持板,所述联动组件一端与驱动件输出端连接,所述动力组件一端与联动组件另一端连接,另一端与夹持板连接,所述联动组件与升降组件连接;移动轮用于将车体移动至机器人顶部,驱动件用于带动升降组件纵向运动,升降组件用于带动移动轮纵向运动,限位组件用于对升降组件进行限位,当移动轮不再继续运动时,升降组件带动联动组件运动至与动力组件连接,驱动件用于带动联动组件转动,联动组件用于带动动力组件横向运动,动力组件用于带动夹持板横向运动,夹持板用于对机器人进行夹持固定。
6.作为本发明进一步的方案:所述升降组件包括:传动机构,一端与驱动件输出端连接;第一螺纹转动杆,与车体转动连接,且与传动机构另一端连接;滑动板,与车体滑动连接,所述滑动板与第一螺纹转动杆螺纹处螺纹连接,所述滑动板底端与移动轮连接;第一弹性件,一端与滑动板连接,另一端与车体连接。
7.作为本发明进一步的方案:所述限位组件包括:连接板,与车体连接;螺纹杆,贯穿连接板并与其螺纹连接;
螺纹槽,开设于滑动板上,且与螺纹杆相匹配。
8.作为本发明进一步的方案:所述联动组件包括:第一伸缩杆,一端与驱动件输出端连接;第一齿轮,与第一伸缩杆另一端连接;折形杆,一端与滑动板连接,另一端与第一伸缩杆转动连接;第二齿轮,与动力组件连接,当滑动板与第一螺纹转动杆转动连接时,第一齿轮与第二齿轮啮合。
9.作为本发明进一步的方案:所述动力组件包括:第二螺纹转动杆,一端与第二齿轮连接,另一端与车体转动连接;螺纹滑板,与车体滑动连接,且与第二螺纹转动杆螺纹处螺纹连接;缓冲组件,一端与螺纹滑板连接,另一端与夹持板连接,用于对夹持力进行缓冲。
10.作为本发明进一步的方案:所述缓冲组件包括:第二伸缩杆,一端与螺纹滑板连接,另一端与夹持板连接;第二弹性件,套设在第二伸缩杆上,所述第二弹性件一端与螺纹滑板连接,另一端与夹持板连接。
11.作为本发明进一步的方案:所述车体与推把连接,所述推把上设有防滑套。
12.作为本发明进一步的方案:所述夹持板远离螺纹滑板的一侧设有防滑垫。
13.与现有技术相比,本发明的有益效果是:本发明通过移动轮将车体移动至机器人顶部,驱动件带动升降组件纵向运动,升降组件带动移动轮纵向运动,限位组件对升降组件进行限位,当移动轮不再继续运动时,升降组件带动联动组件运动至与动力组件连接,驱动件带动联动组件转动,联动组件带动动力组件横向运动,动力组件带动夹持板横向运动,夹持板对机器人进行夹持固定,解决了现有的机器人体积较大,重量较重,需要多名工作人员进行抬起,费时费力,且浪费人力资源的问题。
附图说明
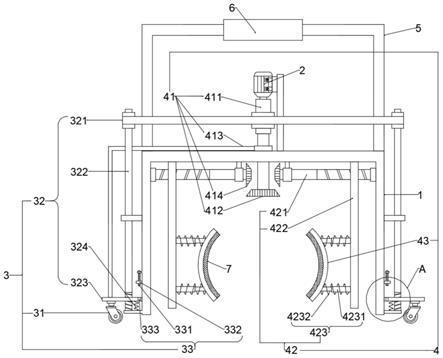
14.图1为本发明实施例中一种户外农田机器人运载装置的结构示意图。
15.图2为图1中a处的结构示意图。
16.图3为车体的立体图。
17.图中:1-车体;2-驱动件;3-移动机构;31-移动轮;32-升降组件;33-限位组件;321-传动机构;322-第一螺纹转动杆;323-滑动板;324-第一弹性件;331-螺纹杆;332-连接板;333-螺纹槽;4-夹持机构;41-联动组件;42-动力组件;43-夹持板;411-第一伸缩杆;412-第一齿轮;413-折形杆;414-第二齿轮;421-第二螺纹转动杆;422-螺纹滑板;423-缓冲组件;4231-第二伸缩杆;4232-第二弹性件;5-推把;6-防滑套;7-防滑垫。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
19.本发明实施例中,请参阅图1至图3,一种户外农田机器人运载装置,包括车体1,还包括:驱动件2,与车体1连接;移动机构3,一端与驱动件2输出端连接,另一端与车体1连接,所述移动机构3包括移动轮31、升降组件32和限位组件33,所述升降组件32一端与驱动件2输出端连接,另一端与移动轮31连接,所述限位组件33一端与车体1连接,另一端与升降组件32连接;夹持机构4,一端与驱动件2输出端连接,另一端与车体1连接,所述夹持机构4包括联动组件41、动力组件42和夹持板43,所述联动组件41一端与驱动件2输出端连接,所述动力组件42一端与联动组件41另一端连接,另一端与夹持板43连接,所述联动组件41与升降组件32连接;移动轮31用于将车体1移动至机器人顶部,驱动件2用于带动升降组件32纵向运动,升降组件32用于带动移动轮31纵向运动,限位组件33用于对升降组件32进行限位,当移动轮31不再继续运动时,升降组件32带动联动组件41运动至与动力组件42连接,驱动件2用于带动联动组件41转动,联动组件41用于带动动力组件42横向运动,动力组件42用于带动夹持板43横向运动,夹持板43用于对机器人进行夹持固定。所述驱动件2可采用驱动电机、步进电机等。所述升降组件32可采用齿轮与驱动件2输出端连接,齿轮与齿板啮合,齿板与移动轮31连接,驱动件2带动齿轮转动,齿轮带动齿板纵向运动,齿板带动移动轮31运动。所述限位组件33可采用抵接块,抵接块与车体1滑动连接,当移动轮31运动至指定位置后,横向滑动抵接块,对升降组件32进行限位。所述联动组件41可采用位移感应器,所述动力组件42可采用伺服电机输出端与螺纹柱连接,螺纹柱与夹持板43螺纹连接,当位移感应器感应到移动轮31不再继续运动时,位移感应器启动伺服电机工作,伺服电机带动螺纹柱转动,螺纹柱带动夹持板43横向运动。
20.作为本发明一种实施例,请参阅图1和图2,所述升降组件32包括:传动机构321,一端与驱动件2输出端连接;第一螺纹转动杆322,与车体1转动连接,且与传动机构321另一端连接;滑动板323,与车体1滑动连接,所述滑动板323与第一螺纹转动杆322螺纹处螺纹连接,所述滑动板323底端与移动轮31连接;第一弹性件324,一端与滑动板323连接,另一端与车体1连接。
21.驱动件2带动传动机构321转动,传动机构321带动第一螺纹转动杆322转动,第一螺纹转动杆322带动滑动板323纵向运动,滑动板323带动移动轮31纵向运动,同时,滑动板323使得第一弹性件324发生形变,当滑动板323运动至与第一螺纹转动杆322转动连接时,滑动板323不再继续纵向运动,此时移动轮31不再继续接触地面,车体1接触地面进行支撑,当驱动件2反向转动时,第一弹性件324为滑动板323重新与第一螺纹转动杆322螺纹连接提供动力。所述传动机构321可采用皮带传动机构、齿轮传动机构等。所述第一弹性件324可采用弹簧、弹片等。
22.作为本发明一种实施例,请参阅图1和图2,所述限位组件33包括:连接板332,与车体1连接;螺纹杆331,贯穿连接板332并与其螺纹连接;
螺纹槽333,开设于滑动板323上,且与螺纹杆331相匹配。
23.转动螺纹杆331,使得螺纹杆331转动的同时纵向运动,螺纹杆331运动至螺纹槽333内部并与其螺纹连接,进而对滑动板323进行限位。
24.作为本发明一种实施例,请参阅图1,所述联动组件41包括:第一伸缩杆411,一端与驱动件2输出端连接;第一齿轮412,与第一伸缩杆411另一端连接;折形杆413,一端与滑动板323连接,另一端与第一伸缩杆411转动连接;第二齿轮414,与动力组件42连接,当滑动板323与第一螺纹转动杆322转动连接时,第一齿轮412与第二齿轮414啮合。
25.驱动件2带动第一伸缩杆411转动,第一伸缩杆411带动第一齿轮412转动,同时,滑动板323纵向运动带动折形杆413纵向运动,折形杆413带动第一伸缩杆411纵向运动,当滑动板323不再继续运动时,第一齿轮412与第二齿轮414啮合。
26.作为本发明一种实施例,请参阅图1,所述动力组件42包括:第二螺纹转动杆421,一端与第二齿轮414连接,另一端与车体1转动连接;螺纹滑板422,与车体1滑动连接,且与第二螺纹转动杆421螺纹处螺纹连接;缓冲组件423,一端与螺纹滑板422连接,另一端与夹持板43连接,用于对夹持力进行缓冲。
27.第一齿轮412带动第二齿轮414转动,第二齿轮414带动第二螺纹转动杆421转动,第二螺纹转动杆421带动螺纹滑板422横向运动,螺纹滑板422带动缓冲组件423横向运动,缓冲组件423带动夹持板43横向运动,夹持板43对机器人进行夹持固定,缓冲组件423对夹持力进行缓冲,当螺纹滑板422运动至与第二螺纹转动杆421转动连接时,此时螺纹滑板422不再继续运动,夹持板43对机器人夹持固定完成,在驱动件2反向转动时,缓冲组件423为螺纹滑板422重新与第二螺纹转动杆421螺纹连接提供动力。所述缓冲组件423可采用弹性柱、弹性杆等。
28.作为本发明一种实施例,请参阅图1,所述缓冲组件423包括:第二伸缩杆4231,一端与螺纹滑板422连接,另一端与夹持板43连接;第二弹性件4232,套设在第二伸缩杆4231上,所述第二弹性件4232一端与螺纹滑板422连接,另一端与夹持板43连接。
29.螺纹滑板422带动第二伸缩杆4231横向运动,第二伸缩杆4231带动夹持板43横向运动,当夹持板43接触机器人时,螺纹滑板422继续运动,进而挤压第二伸缩杆4231和第二弹性件4232,通过第二弹性件4232的弹力对夹持力进行缓冲。所述第二弹性件4232可采用弹簧、弹片等。
30.作为本发明一种实施例,请参阅图1和图3,所述车体1与推把5连接,所述推把5上设有防滑套6。通过设置的推把5便于工作人员推动车体1,通过设置的防滑套6防止工作人员手滑。
31.作为本发明一种实施例,请参阅图1,所述夹持板43远离螺纹滑板422的一侧设有防滑垫7。通过设置的防滑垫7增大夹持板43与机器人之间的摩擦力,防止机器人在运载过程中发生脱落。
32.本发明的工作原理是:初始状态下,移动轮31接触地面,工作人员推动车体1,将车
体1推动至机器人上方,驱动件2正向转动带动传动机构321转动,传动机构321带动第一螺纹转动杆322转动,第一螺纹转动杆322带动滑动板323纵向运动,滑动板323带动移动轮31纵向运动,滑动板323纵向运动带动折形杆413纵向运动,折形杆413带动第一伸缩杆411纵向运动,同时,滑动板323使得第一弹性件324发生形变,当滑动板323运动至与第一螺纹转动杆322转动连接时,滑动板323不再继续纵向运动,此时移动轮31不再继续接触地面,车体1接触地面进行支撑,第一齿轮412与第二齿轮414啮合,驱动件2带动第一伸缩杆411转动,第一伸缩杆411带动第一齿轮412转动,第一齿轮412带动第二齿轮414转动,第二齿轮414带动第二螺纹转动杆421转动,第二螺纹转动杆421带动螺纹滑板422横向运动,螺纹滑板422带动第二伸缩杆4231横向运动,第二伸缩杆4231带动夹持板43横向运动,当夹持板43接触机器人时,螺纹滑板422继续运动,进而挤压第二伸缩杆4231和第二弹性件4232,通过第二弹性件4232的弹力对夹持力进行缓冲,当螺纹滑板422运动至与第二螺纹转动杆421转动连接时,此时螺纹滑板422不再继续运动,夹持板43对机器人夹持固定完成;夹持完成后,驱动件2反向转动,在第一弹性件324的作用力下,滑动板323重新与第一螺纹转动杆322螺纹连接,使得滑动板323反向运动,带动第一伸缩杆411反向运动,使得第一齿轮412与第二齿轮414脱离啮合,使得移动轮31接触地面进行支撑,推动车体1对机器人进行运载;当运载至指定位置后,驱动件2正向转动,使得移动轮31纵向运动,车体1接触地面进行支撑,转动螺纹杆331,使得螺纹杆331运动至螺纹槽333内部并与其螺纹连接,对滑动板323进行限位,限位完成后,驱动件2反向转动,由于滑动板323被限位,滑动板323无法运动,此时第一齿轮412仍然与第二齿轮414啮合,在第二弹性件4232的作用力下,使得螺纹滑板422重新与第二螺纹转动杆421螺纹连接,使得螺纹滑板422横向反向运动,进而使得夹持板43解除对机器人的固定夹持。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1