一种无障碍智能机器人的制作方法
1.本实用新型涉及智能机器人技术领域,具体是一种无障碍智能机器人。
背景技术:
2.工业化程度作为近代以来国家文明发展的标杆,现代人类所享受的绝大部分科技都来源于工业化的成功,随着工业化的发展各种工厂的面积逐渐增大,其中场内转运物资变得逐渐困难,因此转运货物用的智能机器人应运而生。
3.但是,市面上常见的智能机器人并没有对运载货物中常常遇到的高低坡进行设计,导致机器人的转运只能在同一平面上进行,对场地要求苛刻,导致使用者的使用十分不方便,同时运输线路的设置常常需要考虑到各种环境 因素进行调整,让使用者的使用成本变高。
技术实现要素:
4.本实用新型旨在于解决背景技术中存在的缺点,提供一种无障碍智能机器人,通过水平仪检测并带动载物盘进行相应的旋转,使货物与水平面保持平行,并通过巡线传感器简易设置行进线路降低使用者的使用成本。
5.为实现上述目的,本实用新型提供如下技术方案,一种无障碍智能机器人,包括机体、伺服电机和底盘,所述机体顶部设置有载物盘,所述载物盘顶部固定安装有护栏,所述载物盘底部两侧均设置有弹簧柱,所述载物盘底部活动连接有固定杆,所述固定杆底部固定安装有电路板,所述电路板底部设置有水平仪,且水平仪信号输出端与电路板信号接收端信号连接,所述水平仪底部设置有蓄电池,所述机体底部两侧均设置有伺服电机,且电路板与伺服电机电信连接,所述伺服电机一侧驱动连接有主动轮,所述主动轮一侧通过皮带活动连接有收纳轮,所述收纳轮表面设置有牵引绳,所述收纳轮一侧通过牵引绳活动连接有滑轮,所述机体底部固定安装有底盘,所述底盘两侧均固定安装有旋转电机,所述旋转电机两侧驱动连接有驱动轮,所述驱动轮表面活动连接有履带,所述机体底部一侧设置有巡线传感器,所述巡线传感器一侧固定连接有转向电机,所述转向电机两侧固定连接有定杆,所述定杆一端通过轴承转动连接有转向轮。
6.进一步的,所述固定杆顶部通过轴承与载物盘转动连接,且转动角度为0
‑
180
°
。
7.进一步的,所述水平仪为内部中空的球形结构,所述球形结构内部设置有液面感应器,且水平仪内部注有水平液。
8.进一步的,所述载物盘底部开设有穿线孔,所述牵引绳直径长度与穿线孔直径长度一致。
9.进一步的,所述履带表面开设有防滑纹路,且防滑纹路深度为2mm。
10.进一步的,所述转向电机一侧固定安装有控制板,所述巡线传感器信号输出端与控制板信号接收端信号连接。
11.本实用新型提供了一种无障碍智能机器人,具有以下有益效果:
12.1、本实用优点在于,载物盘底部开设有穿线孔,牵引绳直径长度与穿线孔直径长度一致,在使用过程中牵引绳穿过载物盘底部的穿线孔将载物盘牢牢固定在机体顶部,当遇到上下坡的倾斜时,通过水平仪检测并发送至电路板的数据,控制伺服电机释放或收纳牵引绳,通过一侧牵引绳的释放,使弹簧柱抬高载物盘一侧,使载物盘在固定杆上转动适量角度,进而始终与水平面保持平行,进而防止载物盘顶部放置的运载物倾斜造成滑落,使装置能够运载装载物进行上下坡的无障碍移动,提高装置的适用场景。
13.2、其次,转向电机一侧固定安装有控制板,巡线传感器信号输出端与控制板信号接收端信号连接,在使用过程中能够通过巡线传感器检测地面预先放置的工作线路,当到达工作线路转弯处时能够通过巡线传感器检测并将信号发送至控制板处,通过控制板控制转向电机进而转动转向轮的朝向,以此使装置能够在预设工作线路上迅速稳定的移动。
附图说明
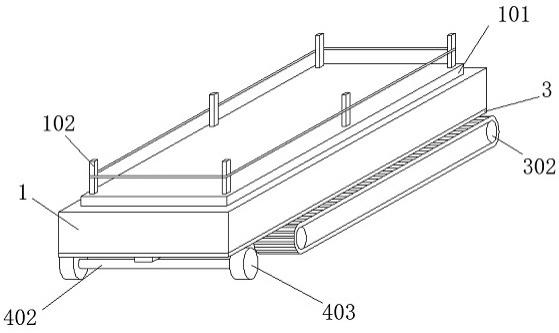
14.图1为本实用新型的整体结构示意图。
15.图2为本实用新型的整体结构侧视图。
16.图3为本实用新型的整体结构仰视图。
17.图4为本实用新型的a处结构放大示意图。
18.图1
‑
4中:1
‑
机体;101
‑
载物盘;102
‑
护栏;103
‑
弹簧柱;104
‑
固定杆;105
‑
电路板;106
‑
水平仪;107
‑
蓄电池;2
‑
伺服电机;201
‑
主动轮;202
‑
收纳轮;203
‑
牵引绳;204
‑
滑轮;3
‑
底盘;301
‑
旋转电机;302
‑
驱动轮;303
‑
履带;4
‑
巡线传感器;401
‑
转向电机;402
‑
定杆;403
‑
转向轮。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.实施例:
21.请参阅图1
‑
4中,
22.本实施例提供的一种无障碍智能机器人,包括机体1、伺服电机2和底盘3,机体1顶部设置有载物盘101,载物盘101顶部固定安装有护栏102,载物盘101底部两侧均设置有弹簧柱103,载物盘101底部活动连接有固定杆104,固定杆104底部固定安装有电路板105,电路板105底部设置有水平仪106,且水平仪106信号输出端与电路板105信号接收端信号连接,水平仪106底部设置有蓄电池,机体1底部两侧均设置有伺服电机2,且电路板105与伺服电机2电信连接,伺服电机2一侧驱动连接有主动轮201,主动轮201一侧通过皮带活动连接有收纳轮202,收纳轮202表面设置有牵引绳203,收纳轮202一侧通过牵引绳203活动连接有滑轮204,机体1底部固定安装有底盘3,底盘3两侧均固定安装有旋转电机301,旋转电机301两侧驱动连接有驱动轮302,驱动轮302表面活动连接有履带303,机体1底部一侧设置有巡线传感器4,巡线传感器4一侧固定连接有转向电机401,转向电机401两侧固定连接有定杆402,定杆402一端通过轴承转动连接有转向轮403。
23.进一步的,固定杆104顶部通过轴承与载物盘101转动连接,且转动角度为0
‑
180
°
,在使用过程中能够通过固定杆104为载物盘101提供支撑力,通过轴承连接载物盘101能够在稳固安装载物盘101的同时使载物盘101能够在固定杆104上转动,在普通状态下载物盘101通过两侧弹簧柱103提供支撑力保持平衡,为装置中其他部件的使用提供实施基础。
24.进一步的,水平仪106为内部中空的球形结构,球形结构内部设置有液面感应器,且水平仪106内部注有水平液,在正常运行的过程中水平仪106内的水平液将平稳不晃动,当遇到上坡与下坡时,由于容器内液体始终保持水平状态而机体1的整体倾斜,将导致水平仪106内部水平液与机体1产生夹角,且机体1整体与斜坡平行,通过液面感应器检测水平液与机体1间的角度,进而得出地面斜坡的坡度,以此对机体1所遇到的斜坡坡度进行检测并通过水平仪106信号发送端发送坡度数据至电路板105信号接收端处。
25.进一步的,载物盘101底部开设有穿线孔,牵引绳203直径长度与穿线孔直径长度一致,在使用过程中牵引绳203穿过载物盘101底部的穿线孔将载物盘101牢牢固定在机体1顶部,当遇到上下坡的倾斜时,通过水平仪106检测并发送至电路板105的数据,控制伺服电机2释放或收纳牵引绳203,通过一侧牵引绳203的释放,使弹簧柱103抬高载物盘101一侧,使载物盘101在固定杆104上转动适量角度,进而始终与水平面保持平行,进而防止载物盘101顶部放置的运载物倾斜造成滑落,使装置能够运载装载物进行上下坡的无障碍移动,提高装置的适用场景。
26.进一步的,履带303表面开设有防滑纹路,且防滑纹路深度为2mm,在行进过程中通过履带303为装置提供运行动力,通过防滑纹路能够增大机器与地面的摩擦力,使其前进动力更大,同时通过防滑纹路能够防止在换季时地面积水导致地面过滑进而造成装置偏移和损坏,有效提高装置的使用寿命。
27.进一步的,转向电机401一侧固定安装有控制板,巡线传感器4信号输出端与控制板信号接收端信号连接,在使用过程中能够通过巡线传感器4检测地面预先放置的工作线路,当到达工作线路转弯处时能够通过巡线传感器4检测并将信号发送至控制板处,通过控制板控制转向电机401进而转动转向轮403的朝向,以此使装置能够在预设工作线路上迅速稳定的移动。
28.在使用本实用新型一种无障碍智能机器人时,首先在工作环境的地面上预设工作线,将装置与外部电源进行连接对蓄电池107进行充电,当充电完成时即可开始使用,将需要运载的货物放置在载物盘101上,通过护栏102对货物进行遮拦和保护,启动装置巡线传感器4将检测地面预先放置的工作线路,通过旋转电机301转动驱动轮302,再通过驱动轮302带动履带303转动,使机体1得以在线路上进行直线移动,当遇到路面积水时通过防滑纹路能够增大机器与地面的摩擦力,防止地面积水导致地面过滑进而造成装置偏移和损坏,当机体1到达工作线路转弯处时能够通过巡线传感器4检测并将信号发送至控制板处,通过控制板控制转向电机401进而转动转向轮403的朝向,以此使装置能够在预设工作线路上迅速稳定的移动,当装置遇到上下坡时机体1的整体倾斜将导致水平仪106内部水平液倾斜,由于容器内液体始终保持水平状态而机体1的整体倾斜,将导致水平仪106内部水平液与机体1产生夹角,且机体1整体与斜坡平行,通过液面感应器检测水平液与机体1间的角度,进而得出地面斜坡的坡度,以此对机体1所遇到的斜坡坡度进行检测并通过水平仪106信号发送端发送坡度数据至电路板105信号接收端处,通过水平仪106检测并发送至电路板105的
数据,控制伺服电机2释放或收纳牵引绳203,通过一侧牵引绳203的释放,使弹簧柱103抬高载物盘101一侧,使载物盘101在固定杆104上转动适量角度,进而始终与水平面保持平行,进而防止载物盘101顶部放置的运载物倾斜造成滑落,使装置能够运载装载物进行上下坡的无障碍移动,提高装置的适用场景,当经过上下坡后能够同样通过水平仪106检测感应地面坡度并通过电路板105控制伺服电机2对牵引绳203进行回调,并通过载物盘101底部两侧的弹簧柱103对货物进行支撑防止货物回调过程中受力不匀导致倾斜,通过以上各部件使装置能够稳定迅速的再各种地形上运载货物,有效提高使用者的使用效率。
29.以上的仅是本实用新型的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本实用新型构思的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1