一种可运输物件机器人
1.本实用新型涉及运输行业相关技术领域,具体来说,涉及一种可运输物件机器人。
背景技术:
2.机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。
3.在企业或者工程生产制造过程中需要使用到运输设备进行操作用来代替人力,现有市场上运输机器人不具备结构简单便于使用的功能,使用构造复杂,使用成本高,不利于使用者的使用,增加了中小型企业的成本,此外在现有运输机器人在运输过程中不能对内部的材料进行减震保护,使得在运输过程中震动对内部的材料造成损坏,针对以上问题我们提出一种可运输物件机器人。
技术实现要素:
4.本实用新型的目的在于提供一种可运输物件机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种可运输物件机器人,包括有万向滚轮、减震组件和运输底架,所述运输底架为u型框架结构,所述运输底架内部一侧中端的中心处通过螺栓固定安装有伺服电机,所述伺服电机输出端焊接固定有丝杆,所述运输底架内部上位于所述丝杆底部一侧的两端出通过螺栓固定安装有限位杆,所述丝杆上螺纹贯穿连接有弧形的活动块,所述活动块的底部两端活动贯穿在所述限位杆中,所述运输底架的底部四周设有所述减震组件,所述减震组件包括有减震柱、减震底座和减震弹簧,所述减震底座内部底端处均匀焊接固定有若干个所述减震弹簧,所述减震弹簧顶端焊接固定有与所述减震底座内部相吻合的减震板,所述减震板顶端焊接固定有贯穿所述减震底座顶部上的所述减震柱,且所述减震柱顶端焊接固定在所述运输底架的底部四周上。
6.进一步的,所述减震底座的底部一侧通过螺栓固定安装有所述万向滚轮。
7.进一步的,所述运输底架内部另一侧中端的中心处通过螺栓固定安装有旋转底座,且所述丝杆顶端焊接固定在所述旋转底座上。
8.进一步的,所述活动块顶部两端通过螺栓固定安装有连接块,所述连接块顶端通过螺栓固定安装有弧形结构的运输斗。
9.进一步的,所述运输底架的外部两端中心处通过螺钉固定安装有led 灯。
10.进一步的,所述运输底架内部底端一侧通过螺栓固定安装有蓄电池组。
11.与现有技术相比,本实用新型具有以下有益效果:通过伺服电机带动丝杆上的活动块在限位杆中实现移动,运行稳定,结构简单,通过活动块带动运输斗对物件进行稳定运输,便于使用,通过万向滚轮对机器人进行移动运输,通过减震组件中的减震弹簧在减震底座内对运输移动中的震动力进行缓冲降解,从而保护内部的物件,led灯在移动中提高光
源,增加安全系数,使用便捷,成本造价低,实用价值高。
附图说明
12.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
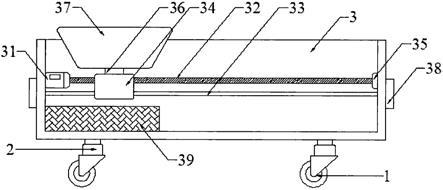
13.图1是根据本实用新型实施的一种可运输物件机器人的结构示意剖面图;
14.图2是根据本实用新型实施的一种可运输物件机器人的结构示意俯视图;
15.图3是根据本实用新型实施的一种可运输物件机器人的减震组件结构示意图;
16.附图标记:
17.1、万向滚轮;2、减震组件;21、减震柱;22、减震底座;23、减震弹簧; 24、减震板;3、运输底架;31、伺服电机;32、丝杆;33、限位杆;34、活动块;35、旋转底座;36、连接块;37、运输斗;38、led灯;39、蓄电池组。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.在本实用新型的描述中,需要说明的是,术语“顶部”、“底部”、“一侧”、“另一侧”、“前面”、“后面”、“中间部位”、“内部”、“顶端”、“底端”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性;此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
20.请参阅图1
‑
3,根据本实用新型实施的一种可运输物件机器人,包括有万向滚轮1、减震组件2和运输底架3,运输底架3为u型框架结构,运输底架3内部一侧中端的中心处通过螺栓固定安装有伺服电机31,伺服电机31 输出端焊接固定有丝杆32,运输底架3内部上位于丝杆32底部一侧的两端出通过螺栓固定安装有限位杆33,丝杆32上螺纹贯穿连接有弧形的活动块34,活动块34的底部两端活动贯穿在限位杆33中,运输底架3的底部四周设有减震组件2,减震组件2包括有减震柱21、减震底座22和减震弹簧23,减震底座22内部底端处均匀焊接固定有若干个减震弹簧23,减震弹簧23顶端焊接固定有与减震底座22内部相吻合的减震板24,减震板 24顶端焊接固定有贯穿减震底座22顶部上的减震柱21,且减震柱21顶端焊接固定在运输底架3的底部四周上。
21.其中,减震底座22的底部一侧通过螺栓固定安装有万向滚轮1,实现运输移动。
22.其中,运输底架3内部另一侧中端的中心处通过螺栓固定安装有旋转底座35,且丝杆32顶端焊接固定在旋转底座35上,使得丝杆32能够稳定旋转。
23.其中,活动块34顶部两端通过螺栓固定安装有连接块36,连接块36 顶端通过螺栓固定安装有弧形结构的运输斗37,通过运输斗37对物料进行运输。
24.其中,运输底架3的外部两端中心处通过螺钉固定安装有led灯38,在夜晚或者光线不强时候提供照明,增加运输安全系数。
25.其中,运输底架3内部底端一侧通过螺栓固定安装有蓄电池组39,为装置提供电能。
26.工作原理
27.通过本实用新型的上述方案,一种可运输物件机器人在使用过程中通过伺服电机31带动丝杆31上的活动块34在限位杆33中实现移动,运行稳定,结构简单,通过活动块34带动运输斗37对物件进行稳定运输,便于使用,通过万向滚轮1对机器人进行移动运输,通过减震组件2中的减震弹簧23在减震底座22内对运输移动中的震动力进行缓冲降解,从而保护内部的物件,led 灯38在移动中提高光源,增加安全系数,使用便捷,成本造价低,实用价值高。
28.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
29.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1