智能小车的制作方法
1.本实用新型属于物流智能技术领域,涉及一种用于危险试剂安全运输的智能小车。
背景技术:
2.随着科技的不断前进,工业4.0的提出,物流系统越来越制约着社会工业化进程的发展。物流运输体现在生产生活的许多方面,无论是工厂车间还是产品储藏仓库以及快递物件的运输和分类等诸多领域都对物流导航系统提出了越来越高的要求。目前针对于危险试剂的运输多采用缓冲泡沫/海绵等材料,或者缓冲结构实现在运输过程中对由速度变化波动以及地面间运动而导致的冲击性作用力的分散和释放。因此以上所述仍停留在被动式降低冲击波的方式来提高危险试剂的运输安全性。
3.同时以上采用的缓冲方式适用于冲击力度大幅度大的情况,而针对危险试剂甚至极端危险物质的运输不仅仅需要能够抗击幅度大力度大的冲击,更需要注意的是小振幅高频振荡的危害,因为在危险溶液或者粉末类物质的运输过冲中小振幅高频振荡会加速危险物质的相互运动,对于极端危险物质的运输是具有极大危害性的。因此这里需要一种可用于危险试剂安全运输的新型方式,故提出了一种用于危险试剂安全运输的智能小车。
技术实现要素:
4.本实用新型的目的在于提出一种智能小车,用于危险试剂安全运输,旨在运用主动式感知运动检测配合调控磁悬浮技术实现主动式抑制高频小振幅的冲击干扰,实现危险试剂安全运输的功能。
5.为达到上述的目的,本实用新型提供了一种智能小车。
6.一种智能小车,所述智能小车包括置物台、底座和控制模块,所述置物台和底座呈层叠设置,二者其上均设有多个磁性体,所述控制模块控制所述置物台上的多个磁性体与所述底座上的多个磁性体共同配合,使得置物台与底座之间保持悬浮稳定态。
7.进一步,所述置物台上的多个磁性体为永磁体,包括柱形永磁体和环形永磁体,所述柱形永磁体位于所述置物台的四周外侧面上,所述环形永磁体位于所述置物台的底面上;所述底座上的多个磁性体为电磁铁,包括柱形电磁铁和环形电磁铁,所述柱形电磁铁位于所述底座的四周内侧面上,与所述置物台的四周外侧面上的柱形永磁体水平相对应,所述环形电磁铁位于所述底座的顶面上,与所述置物台的底面上的环形永磁体竖直相对应。
8.进一步,所述置物台包括置物台本体,所述置物台本体大致呈扁平状方体,底面向顶面方向凹进形成第一收容空间,所述环形永磁体大致呈方环形,位于所述第一收容空间,所述环形永磁体的四个侧面与所述置物台本体的四个侧面一一对应,所述柱形永磁体共八个,所述置物台本体的四周每个外侧面上设有二个柱形永磁体,且八个柱形永磁体呈对称设置;所述底座包括底座本体,所述底座本体大致呈扁平状方体,顶面向底面方向凹进形成第二收容空间,所述环形电磁铁大致呈方环形,位于所述第二收容空间,所述环形电磁铁的
四个侧面与所述底座本体的四个侧面一一对应,所述柱形电磁铁共八个,所述底座本体的四周每个内侧面上设有二个柱形电磁铁,且八个柱形电磁铁呈对称设置。
9.进一步,所述控制模块包括光电探测器和半导体激光器;所述光电探测器位于所述置物台本体的底面的中心处,所述环形永磁体位于所述光电探测器的外围;所述半导体激光器位于所述底座本体的顶面的中心处,所述环形电磁铁位于所述半导体激光器的外围。
10.进一步,所述控制模块还包括加速度计,所述加速度计位于所述置物台本体的底面的中心处。
11.进一步,所述控制模块还包括转换器、mcu、第一电压驱动器以及第二电压驱动器,所述mcu与所述转换器、第一电压驱动器、第二电压驱动器以及加速度计连接;所述转换器与所述光电探测器相连,将光电流信号转换为水平方向的位置信息发送所述mcu,所述mcu对所述水平方向的位置信息进行比较计算,输出第一驱动信号给所述第一电压驱动器,所述第一电压驱动器驱动所述柱形电磁铁以配合实现所述置物台上的柱形永磁体与所述底座上的柱形电磁铁之间的磁悬浮调控力度和缓冲位移;所述加速度计进行竖直方向的位置信息的检测并传送给所述mcu进行解算,所述mcu输出第二驱动信号给所述第二电压驱动器,所述第二电压驱动器驱动所述环形电磁铁以配合实现所述置物台上的环形永磁体与所述底座上的环形电磁铁之间的磁悬浮调控力度和缓冲位移。
12.进一步,所述光电探测器是四象限光电探测器。
13.进一步,所述水平方向的位置信息包括前后位置信息和左右位置信息,所述前后位置信息为象限四+象限三-象限一-象限二,所述左右位置信息为象限四+象限一-象限二-象限三。
14.进一步,所述底座上还设有车轮,所述车轮位于所述底座本体的相对两侧面的外侧;所述智能小车还包括物品容器,所述物品容器安置于所述置物台上,用于容纳物品;所述物品包括危险试剂。
15.本实用新型巧妙的将微位移探测四象限光电系统安设于置物台与底座之间实现置物台的微位移以及运动加速度的检测。并且配合了水平和竖直方向上置物台与底座空隙间的主动调控式磁悬浮实现高频小振幅的冲击抑制,在危险试剂安全运输方面具有突破性进展。
16.本实用新型较现有技术所具有的特点和有益效果主要是:
17.1、本实用新型巧妙的将微位移探测四象限光电系统安设于置物台与底座之间实现置物台的微位移以及运动加速度的检测。
18.2、本实用新型采用的磁悬浮振动抑制技术可以极大程度的降低高频低振幅针对置物台的扰动,提升了平稳运输性能。
19.3、本实用新型采用电磁铁与永磁体配合并通过电压驱动器实时控制电磁铁实现主动式运动缓冲,可以极大程度的提升运输平稳性。
附图说明
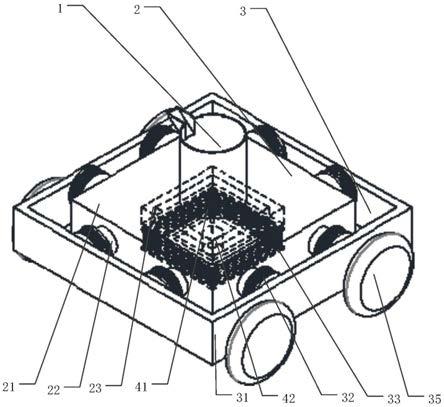
20.图1为本实用新型一种智能小车的立体示意图。
21.图2为本实用新型一种智能小车的正面示意图。
22.图3为本实用新型一种智能小车的俯视示意图。
23.图4为本实用新型一种智能小车的控制模块的结构示意图。
24.图5为本实用新型一种智能小车的控制流程示意图。
25.图6为本实用新型一种智能小车前后方向平稳运动的控制流程示意图。
26.图中:1-物品容器;2-置物台;3-底座;4-控制模块;
27.21-置物台本体;22-柱形永磁体;23-环形永磁体;24-第一收容空间;31-底座本体;32-柱形电磁铁;33-环形电磁铁;34-第二收容空间;35-车轮;
28.41-光电探测器;42-半导体激光器;43-加速度计;44-转换器;45-mcu;46-第一电压驱动器;47-第二电压驱动器。
具体实施方式
29.下面结合附图和具体实施方式,对本实用新型作进一步详细说明,但本实用新型保护范围不限于下述实施例,凡采用等同替换或等效变换形式获得的技术方案,均在本实用新型保护范围之内。
30.如附图1至附图3所示,为本实用新型的一种智能小车,包括物品容器1、置物台2、底座3和控制模块4。
31.所述物品容器1为圆柱形杯状容器,安置于方形的置物台2中心上方,用于危险试剂的短时间容纳。
32.所述置物台2包括置物台本体21、柱形永磁体22、环形永磁体23;所述置物台21呈缺少了底面的正方盒体,即底面向顶面方向凹进,形成第一收容空间24,所述环形永磁体23大致呈方环形,位于所述第一收容空间24,其四个侧面与所述置物台本体21的四个侧面一一对应;所述柱形永磁体22为圆柱形,共八个,所述置物台本体21的四个周面外侧面圆周对称固定安设所述八个柱形永磁体22;所述控制模块4包括光电探测器41、半导体激光器42以及加速度计43,所述光电探测器41为四象限光电探测器,和所述加速度计43位于所述置物台本体21的底面的下方中心处,即位于所述第一收容空间24的中心处,在所述光电探测器41和所述加速度计43的外围固定安设所述方环状的环形永磁体23,
33.所述底座3包括底座本体31、柱形电磁铁32、环形电磁铁33、车轮35;所述底座本体31呈缺少上顶面的正方盒体,即顶面向底面方向凹进,形成第二收容空间34,其内部底面上中心处固定安设有所述半导体激光器42,在所述半导体激光器42外围固定安设有呈方环状的环形电磁铁33,与所述置物台本体21内侧下底面安装的环形永磁体23对应;所述柱形电磁铁33为圆柱形,共八个,所述底座本体31的四周面内侧圆周对称固定安设所述八个柱形电磁铁32,与置物台本体21四周面外侧面固定的余个柱形永磁体22一一对应;所述底座本体31四周面外侧在对称的两个外侧面上安设有四个车轮3-5。
34.所述置物台2层叠悬浮设置在所述底座3的中心上方,其保持水平方向前后左右的悬浮稳定态以及竖直方向的悬浮稳定态。
35.如附图4所示,为本实用新型所设计的一种智能小车的控制模块4的结构示意图。所述控制模块4还包括转换器44、mcu45、第一电压驱动器46以及第二电压驱动器47,所述mcu45与所述转换器44、第一电压驱动器46、第二电压驱动器47以及加速度计43连接;所述转换器44为iv转换器,与所述光电探测器41相连,将所述光电探测器41发来的光电流信号
转换为水平方向的位置信息发送给所述mcu45,所述mcu45对所述水平方向的位置信息进行比较计算,即将当前的位置信息与之前的位置信息进行比较,输出第一驱动信号给所述第一电压驱动器46,所述第一电压驱动器46驱动所述柱形电磁铁32以配合实现所述置物台2上的柱形永磁体22与所述底座3上的柱形电磁铁33之间的磁悬浮调控力度和缓冲位移;所述加速度计43进行竖直方向的位置信息的检测并传送给所述mcu45进行解算,所述mcu45输出第二驱动信号给所述第二电压驱动器47,所述第二电压驱动器47驱动所述环形电磁铁33以配合实现所述置物台2上的环形永磁体23与所述底座3上的环形电磁铁33之间的磁悬浮调控力度和缓冲位移。当然,所述控制模块4还包括电源管理模块48,对所述光电探测器41、半导体激光器42、加速度计43、转换器44、mcu45、第一电压驱动器46以及第二电压驱动器47进行供电管理。
36.其中,所述水平方向的位置信息包括前后位置信息和左右位置信息,假定以图中x方向为前后方向,y方向为左右方向,所述前后位置信息为象限四+象限三-象限一-象限二,所述左右位置信息为象限四+象限一-象限二-象限三。
37.如附图5所示,为本实用新型智能小车的控制流程示意图。
38.本实用新型智能小车的控制流程,主要就是要保持所述置物台2相对于底座保持在中心位置,主要是通过运用光电探测器41配合半导体激光器42实现微位移检测和保持中心位置控制。具体包括:智能小车开始启动后,首先进行初始化,初始化包括光电探测器41、半导体激光器42、加速度计43初始化以及中心位置的调零;然后光电探测器41检测半导体激光器42发来的光斑的前后方向的位置,与之前调零后的中心位置对比,如果有偏差则根据对比的偏差值控制前后方向的柱形电磁铁32配合对应的柱形永磁体22实现前后方向的位置调整,保持中心位置,如果没有偏差则进行后面的内容;进一步光电探测器41检测半导体激光器42发来的光斑的左右方向的位置,与之前调零后的中心位置对比,如果有偏差则根据对比的偏差值控制左右方向的柱形电磁铁32配合对应的柱形永磁体22实现左右方向的位置调整,保持中心位置,如果没有偏差则进行后面的内容;最后根据加速度计43检测竖直方向的抖动量,如果抖动量大于阈值则根据抖动量控制竖直方向的环形电磁铁33配合对应的环形永磁体23实现竖直方向的位置调整,保持中心位置,如果抖动量没有大于阈值则结束流程。
39.这里以前后方向的运动平稳调节为例介绍运动平稳调节控制流程。请参见图6所示,首先采用光电探测器41配合半导体激光器42检测前后方向的位置信息,并将当前的位置信息与调零后的中心位置对比得到前后方向的偏差量dx。并测量前后方向所对应控制的柱形电磁铁32电压u1’和u2’,通过加速度计32获取前后方向的冲击加速度ax,判断置物台21在前后方向是否处于中心,当产生偏移时判断是否为正向偏移,若为正向则通过公式u1=-k1*ax+ u1’控制前方的柱形电磁铁32,u2=k2*ax+ u2’控制后方的柱形电磁铁32。反之则用u1=k1*ax+ u1’控制前方圆柱形电磁铁32,u2=-k2*ax+ u2’控制后方的柱形形电磁铁32。并实时检测查表调节系数k1与k2实现柔性缓冲。
40.可以想象,左右方向的控制与上述前后方向的控制相似。而竖直方向的控制跟前后左右方向稍微有点区别。首先根据加速度计43检测到的竖直方向的加速度值az,可以通过两次积分计算出竖直方向的抖动量l,如果抖动量的绝对值大于阈值lt(始终为正值),则测量上下方向对应的环形电磁铁33的电压u3’。当抖动量大于lt时,则通过公式u3=-k3*az+
u3’控制环形电磁铁33;反之当抖动量小于-lt时,则通过公式u3=k3*az+u3’控制环形电磁铁33。并实时检测查表调节系数k3实现柔性缓冲。
41.本实用新型巧妙的将微位移探测四象限光电系统安设于置物台与底座之间实现置物台的微位移以及运动加速度的检测。并且配合了水平和竖直方向上置物台与底座空隙间的主动调控式磁悬浮实现高频小振幅的冲击抑制,在危险试剂安全运输方面具有突破性进展。
42.本实用新型较现有技术所具有的特点和有益效果主要是:
43.1、本实用新型巧妙的将微位移探测四象限光电系统安设于置物台与底座之间实现置物台的微位移以及运动加速度的检测。
44.2、本实用新型采用的磁悬浮振动抑制技术可以极大程度的降低高频低振幅针对置物台的扰动,提升了平稳运输性能。
45.3、本实用新型采用电磁铁与永磁体配合并通过电压驱动器实时控制电磁铁实现主动式运动缓冲,可以极大程度的提升运输平稳性。
46.以上仅为本实用新型的实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些均属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1