一种废墟场景小型救援侦察四足机器人
1.本实用新型涉及机器人技术领域,具体的说是一种废墟场景小型救援侦察四足机器人。
背景技术:
2.遇到灾难,如火灾,地震,救援人员面对废墟情景救援不仅要面临巨大生命危险,而且往往因为地形狭小对救援环境的未知而感到有心无力,受制于特殊地形与环境,现有技术中有很多用于救援侦查的机器人,如:公开号为cn107538503a公开了地震救援机器人,公开了机器人本体、顶盖、行走机构、控制系统,但是其体积较大,并不能进入到狭小空间进行侦察。公开号为cn112874651a公开了四足机器人,具体公开了机身、供能结构、髋部、大腿部、小腿部、行走部,该四足机器人结构较为复杂,不易维修,且机器人高度较高,其机身较宽,无法进入到狭小空间,无法满足救援侦查要求。授权公告号为cn104890759b公开了一种四足机器人,具体公开了腿部结构,其腿部结构为联动式,占用机身空间,使整个机器人的尺寸较大。
技术实现要素:
3.为了解决上述问题,本实用新型提供了一种结构简单、强度高、体积小,且便于维修的废墟场景小型救援侦察四足机器人。
4.为了达到上述目的,本实用新型是通过以下技术方案来实现的:
5.本实用新型是一种废墟场景小型救援侦察四足机器人,包括主体和四个腿部,在主体上设置有控制器、电池和摄像装置,控制器和电池分别固定在主体的上表面和下表面,两组肩部护板组可拆卸固定在主体前后两侧的固定部上,在固定部上设置有对肩部护板组进行定位的定位部,在每个肩部护板组的两侧均可拆卸固定有腿部,在主体上端可拆卸设置有上层板。
6.本实用新型的进一步改进在于:固定部具有空腔。
7.本实用新型的进一步改进在于:肩部护板组包括肩部前护板和肩部后护板,在肩部前护板和肩部后护板上均设置有与定位部11配合的槽口。
8.本实用新型的进一步改进在于:腿部通过第一舵机固定在肩部前护板上,腿部包括可拆卸的第一舵机、肩关节舵机支架、第二舵机、腿部护板组、第三舵机和足部,第一舵机、第二舵机均固定在肩关节舵机支架上,且肩关节舵机支架可转动固定在肩部后护板和腿部护板组的一个腿部护板上,第二舵机与腿部护板组的另一个腿部护板固定,第三舵机固定在其中一个腿部护板上,且足部固定在第三舵机上,足部可转动固定在另一个腿部护板上。
9.本实用新型的进一步改进在于:在腿部护板之间可拆卸设置有连接机构。
10.本实用新型的进一步改进在于:连接机构包括设置在两个腿部护板上的加固部,支撑连接件的两端通过对应的加固部限位,并通过螺栓固定。
11.本实用新型的有益效果是:本实用新型的机器人主体结构简单,腿部、主体与上层板均为可拆卸式固定,且腿部的第一舵机、第二舵机、第三舵机腿部护板和足部均可拆卸,便于维修和更换。且通过本实用新型的腿部采用串联式方案,减少机械结构的同时,增加了机器人内部的空间,且本实用新型的机器人的腿部固定在肩部护板组上而非直接固定在主体上,可以减小主体的宽度。此外,本实用新型的电池是固定在两个固定部之间的主体上,有利于降低本实用新型的机器人的整体高度。
附图说明
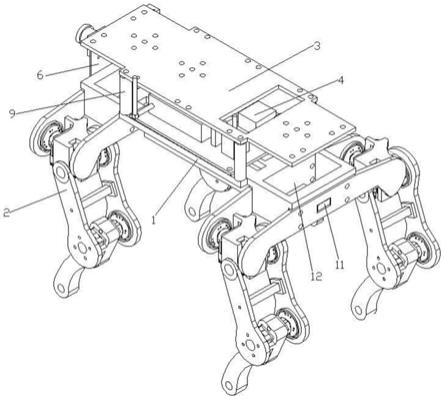
12.图1是本实用新型结构示意图。
13.图2是本实用新型爆炸图。
14.图3是本实用新型主体示意图。
15.图4是本实用新型主体爆炸示意图。
16.图5是本实用新型的腿部示意图。
17.图6是本实用新型的腿部爆炸示意图。
18.其中:1
‑
主体,11
‑
定位部,12
‑
固定部,2
‑
腿部,21
‑
第一舵机,22
‑
肩关节舵机支架,23
‑
第二舵机,24
‑
第三舵机,25
‑
足部,26
‑
腿部护板,27
‑
连接机构,271
‑
加固部,272
‑
支撑连接件,3
‑
上层板,4
‑
控制器,5
‑
电池,6
‑
摄像装置,7
‑
肩部前护板,8
‑
肩部后护板,9
‑
尼龙柱。
具体实施方式
19.以下将以图式揭露本实用新型的实施方式,为明确说明起见,许多实务上的细节将在以下叙述中一并说明。然而,应了解到,这些实务上的细节不应用以限制本实用新型。也就是说,在本实用新型的部分实施方式中,这些实务上的细节是非必要的。
20.本实用新型是一种废墟场景小型救援侦察四足机器人,包括主体1和四个腿部2,在主体1上设置有控制器4、电池5和摄像装置6,电池5固定在主机1的下端,控制器4可拆卸安装在主体1上端,两组肩部护板组可拆卸固定在主体1前后两侧的固定部12上,固定部12具有空腔,分线板和线材被安装在空腔内,还可以在空腔的上端扣上空腔封板,在固定部12上设置有对肩部护板组进行定位的定位部11,在每个肩部护板组的两侧均可拆卸固定有腿部2,在主体1上端可拆卸设置有上层板3。
21.肩部护板组包括肩部前护板7和肩部后护板8,在肩部前护板7和肩部后护板8上均设置有与定位部11配合的槽口。通过槽口与定位部11的配合能够快速对肩部前护板7和肩部后护板8进行定位,并通过螺丝固定在固定部12上,通过该结构便于安装和拆卸,方便维修。
22.腿部2通过第一舵机21固定在肩部前护板7上,腿部2包括可拆卸的第一舵机21、肩关节舵机支架22、第二舵机23、腿部护板组、第三舵机24和足部25,第一舵机21、第二舵机23均固定在肩关节舵机支架22上,且肩关节舵机支架22通过一体成型的轴和轴承可转动固定在肩部后护板8上,该轴与第一舵机21输出轴同轴线设置,并通过第一舵机21带动转动,肩关节舵机支架22通过另外一个与第二舵机23的输出轴同轴线的轴和轴承可转动固定在其中一个腿部护板26上,在肩部后护板8和腿部护板26上均设置有安装轴承的装配槽,第二舵机23与腿部护板组的另一个腿部护板26固定,通过第二舵机23带动腿部护板组转动,第三
舵机24通过螺丝固定在其中一个腿部护板26上,且在足部25上设置有安装第三舵机24的安装槽,足部25上设置有与另一个腿部护板26上的轴承固定的轴承配合的轴,且在该腿部护板26外侧固定有封住所述轴承的盖板,通过第三舵机24工作带动足部25转动。在固定第一舵机21、第二舵机23和第三舵机24的肩部前护板7和腿部护板26上均设置有与舵盘配合的凸圈,通过凸圈对舵盘进行定位,能够有效防止舵盘出现安装位置出现偏差。本实用新型的机器人的腿部2的最大活动范围扩大至前后180
°
,左右135
°
。
23.在腿部护板26之间可拆卸设置有连接机构。连接机构包括设置在两个腿部护板26上的加固部,在支撑连接件的两端和加固部内的腿部护板26上设置有对应的螺纹孔。在安装支撑连接件时,先将支撑连接件的两端插入到对应腿部护板26上的加固部内,并通过螺栓固定,通过连接机构能够有效稳定机器人的腿部结构。
24.上层板3通过数个尼龙柱9支撑。控制器4处于主体1与上层板3之间,控制器4连接有超声波模块、zigbee模块、摄像装置6、第一舵机21、第二舵机23和第三舵机24,并在控制器4上预留数个接口,可连接激光雷达等模块,在控制器4中还设置有测量机器人姿态的imu模块和高精度倾角传感器,控制器4根据imu模块和高精度倾角传感器检测到的信号控制第一舵机21、第二舵机23和第三舵机24。摄像装置6通过安装板固定在上层板3与主体1之间,且处于机器人的前侧,摄像装置6采用的是ccd摄像头,在摄像装置6侧边设置有led灯。通过ccd摄像头得到的图像信息通过控制器4内的图传模块传送给上位机。
25.以上所揭露的仅为本发明的一种较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1