自动导引车的制作方法
1.本技术涉及移动运输设备的领域,尤其是涉及一种自动导引车。
背景技术:
2.自动导引车(agv)是便携式机器人沿地板上的长标记的线或导线下面或使用无线电波、视觉相机、磁体或激光器进行导航,最常用于工业应用中,以在大型工厂厂房周围运输重物。
3.自动导引车虽然能实现自动位置的移动,但其移动轨迹的误差范围大,需要设置相对较宽的通道供导引车移动。现在安装一些大型设备时,需要将大型设备拆分成多部分进行分别安装,安装过程中需要保证各部分之间的精确对准。
4.针对上述中的相关技术,发明人认为存在有现有导引车移动待安装件时位置误差大的缺陷。
技术实现要素:
5.为了提高导引车安装待安装件移动的位置精度,本技术提供一种自动导引车。
6.本技术提供的一种自动导引车,采用如下的技术方案:
7.一种自动导引车,包括车体,所述车体上连接有绕自身轴线转动的主转盘,和输出轴与主转盘同轴固定带动主转盘转动的自锁减速箱,自锁减速箱的输入轴上设置有驱动手柄。
8.通过采用上述技术方案,通过驱动手柄对自锁减速箱施加作用力,对于主转盘施加的转动驱动作用更加平稳,能更加自由的调整主转盘的转动,便于现场的安装,自锁减速箱能将驱动手柄的作用力经过减速后缓慢输送到主转盘,驱动主转盘转动,实现对主转盘上。
9.优选的,所述车体包括底架和固定于底架一端的竖架,主转盘与竖架转动连接;还包括设置于底架的蓄电池,蓄电池设置于底架远离竖架一端。
10.通过采用上述技术方案,主转盘和蓄电池分别设置于底架两端,能提高车体自身放置时的稳定性。
11.优选的,所述车体上设置有驱动后轮和万向前轮,车体上设置有带动驱动后轮转动的驱动电机。
12.通过采用上述技术方案,通过后轮对车体的移动进行驱动,当待安装件连接于主转盘后,驱动轮的位置更接近车体整体重心位置,便于车体的移动;万向前轮能引导车体沿多个方向移动。
13.优选的,所述驱动后轮设置有两个,驱动电机与驱动后轮一一对应,驱动电机为驱动后轮转动的差速电机。
14.通过采用上述技术方案,通过差速电机实现对驱动后轮的控制,两个驱动后轮上的差速电机运行速度相同时,有助于车体沿直线方向稳定移动;当两个驱动后轮上的差速
电机运行速度不同时,能便于调整车体的移动方向。
15.优选的,还包括控制差速电机运行的操作手柄,操作手柄的拨动方向与车体的移动方向对应。
16.通过采用上述技术方案,操作手柄便于工作人员对差速电机进行控制,便于控制车体的助力移动。
17.优选的,所述车体上固设有位于主转盘上安装的待安装件正下方的接油槽。
18.通过采用上述技术方案,接油槽能接受从待安装件上滴落的油污或掉落的物质,减少对使用环境的影响。
19.优选的,所述主转盘上固设有激光器,激光器发出的光线与主转盘轴线平行。
20.通过采用上述技术方案,通过观察激光器光线的方向,便于确定主转盘当下的轴线方向;当车体移动时,通过观察激光器发出光线射向远处的位置是否变化,能确定车体是否按照设定的轨迹移动;当主转盘转动精确调整待安装件的位置时,激光器射出的光线能将主转盘的转动轨迹放大,便于精确调整主转盘位置。
21.优选的,所述激光器设置有两个,两个激光器对称设置于主转盘轴线所在竖直面的两侧。
22.通过采用上述技术方案,两个激光器对称设置,能便于在主转盘两侧的任一侧进行主转盘转动状态的观察。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过驱动手柄对自锁减速箱施加作用力,对于主转盘施加的转动驱动作用更加平稳,能更加自由的调整主转盘的转动,便于现场的安装,自锁减速箱能将驱动手柄的作用力经过减速后缓慢输送到主转盘,驱动主转盘转动,实现对主转盘上;
25.2.通过差速电机实现对驱动后轮的控制,两个驱动后轮上的差速电机运行速度相同时,有助于车体沿直线方向稳定移动;当两个驱动后轮上的差速电机运行速度不同时,能便于调整车体的移动方向;
26.3.通过观察激光器光线的方向,便于确定主转盘当下的轴线方向;当车体移动时,通过观察激光器发出光线射向远处的位置是否变化,能确定车体是否按照设定的轨迹移动;当主转盘转动精确调整待安装件的位置时,激光器射出的光线能将主转盘的转动轨迹放大,便于精确调整主转盘位置。
附图说明
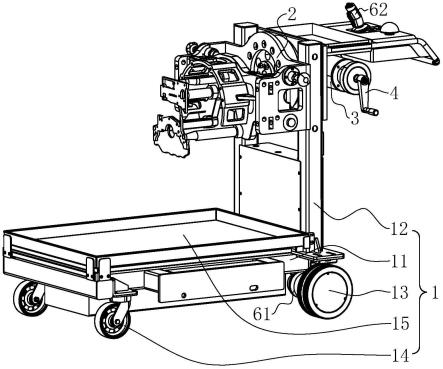
27.图1是实施例一的整体结构示意图;
28.图2是实施例一中显示蓄电池的结构示意图;
29.图3是实施例二中显示主转盘与激光器关系的结构示意图。
30.附图标记说明:1、车体;11、底架;12、竖架;13、驱动后轮;14、万向前轮;15、接油槽;2、主转盘;21、激光器;3、自锁减速箱;4、驱动手柄;5、蓄电池;61、差速电机;62、操作手柄。
具体实施方式
31.以下结合附图1-3对本技术作进一步详细说明。
32.实施例1
33.参照图1,自动导引车包括车体1,车体1上连接有绕自身轴线转动的主转盘2,主转盘2与待安装件安装固定,车体1于水平面内移动到待安装件的安装位置,通过转动主转盘2精确调整待安装件的周向位置,以实现待安装件的移动和与其连接的装置的对准。
34.车体1包括长方形盒体机构的底架11和固定于底架11长度方向一端的竖架12,主转盘2与竖架12转动连接,主转盘2的轴线沿底架11长度方向,主转盘2位于底架11正上方。通过移动底架11,实现带动竖架12上的主转盘2的移动,主转盘2的移动带动带移动件移动。
35.参照图2,可选的,为便于保证车体1自身放置时的稳定性,底架11上设置有蓄电池5,蓄电池5通过底架11的上盖板压紧于底架11上的固定位置,蓄电池5设置于底架11远离竖架12的一端。主转盘2和蓄电池5分别设置于底架11两端,利用蓄电池5自身质量与主转盘2进行平衡,能使车体1整体重心靠近底架11长度方向中间位置。
36.可选的,为便于车体1的移动,车体1上设置有驱动后轮13和万向前轮14,驱动后轮13和万向前轮14分别设置有两个,位于底架11的四个端角,两个驱动后轮13上分别设置有对其进行驱动的驱动电机,驱动电机为差速电机61。通过后轮对车体1的移动进行驱动,当待安装件连接于主转盘2后,驱动轮的位置更接近车体1整体重心位置,便于车体1的移动;万向轮能引导车体1沿多个方向移动。通过差速电机61实现对驱动后轮13的控制,两个驱动后轮13上的差速电机61运行速度相同时,有助于车体1沿直线方向稳定移动;当两个驱动后轮13上的差速电机61运行速度不同时,能便于调整车体1的移动方向。
37.为便于对差速电机61进行控制,车体1上设置有控制差速电机61运行的操作手柄62,操作手柄62的拨动方向与车体1的移动方向对应;便于工作人员对差速电机61进行控制,便于控制车体1的助力移动。
38.为便于控制主转盘2的转动,竖架12上设置有自锁减速箱3,自锁减速箱3的输出轴与主转盘2同轴固定带动主转盘2转动,自锁减速箱3的输入轴上设置有驱动手柄4。设置驱动手柄4,采用人工进行驱动控制,对于主转盘2的转动调节更加稳定和便于控制,自锁减速箱3能将驱动手柄4的作用力经过减速后缓慢输送到主转盘2,实现对主转盘2的转动控制。
39.可选的,车体1上固设有位于主转盘2上安装的待安装件正下方的接油槽15。接油槽15能接受从待安装件上滴落的油污或掉落的物质,减少对车体1使用环境的影响。
40.实施例1的实施原理为:
41.工作人员推动车体1移动时,同时能拨动操作手柄62,对车体1的移动进行助力,便于车体1的移动推动,既能避免使用存电控的方式带动车体1移动带动的控制复杂的问题,同时又避免仅使用人工推动车体1移动的难度大的情况,将车体1带动待安装件移动到固定位置后,通过驱动手柄4对自锁减速箱3施加作用力,对于主转盘2施加的转动驱动作用更加平稳,能更加自由的调整主转盘2的转动,能更准确调整主转盘2的位置,便于现场的安装。
42.实施例2
43.参照图3,本实施例与实施例1的不同之处在于,自动导引车包括激光器21,激光器21为小型激光灯,激光器21固定于主转盘2上的上方,激光器21发出的光线不会受到车体1上障碍物的影响。在其他一实施例中,主转盘2上固定有连接杆,连接杆与激光器21连接固定。安装时,需要保证激光器21发出的光线与主转盘2轴线平行,以便于工作人员的观察对准。
44.通过观察激光器21光线的方向,便于确定主转盘2当下的轴线方向;当车体1移动时,通过观察激光器21发出光线射向远处的位置是否变化,能确定车体1是否按照设定的轨迹移动;当主转盘2转动精确调整待安装件的位置时,激光器21射出的光线能将主转盘2的转动轨迹放大,便于精确调整主转盘2位置。
45.可选的,激光器21设置有两个,两个对称设置于主转盘2轴线所在竖直面的两侧。两个激光器21对称设置,能便于在主转盘2两侧的任意一侧进行主转盘2转动状态的观察,方便操作人员的观察。
46.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1