履带式车辆、运行轨道总成、车辆系统和在运行轨道总成上行驶的方法与流程
履带式车辆、运行轨道总成、车辆系统和在运行轨道总成上行驶的方法
1.本发明涉及一种履带式车辆和用于该履带式车辆的运行轨道装置。本发明还涉及一种车辆系统,其包括履带式车辆和运行轨道装置。此外,本发明涉及一种通过履带式车辆在运行轨道装置上行驶的方法。
2.de202020100256u1公开了这种类型的履带式车辆,其包括负载组件和至少两个驱动履带,该驱动履带可移动地安装在负载组件上,用于沿着相应驱动履带的运行轨道运动,以使履带式车辆沿着一个运行方向运行。由此还已知一种车辆系统,其包括通用型的履带式车辆和通用型的道路装置。在这种情况下,履带式车辆可以包括两对或多对驱动履带,驱动履带通过支撑平台布置在履带式车辆的负载组件上。支撑平台可以围绕旋转轴旋转,该旋转轴垂直于履带式车辆站立的方向延伸。这使得履带式车辆可以在水平面内转向任何方向。
3.然而,这种类型的履带式车辆的运动自由度由于各种原因受到限制。驱动履带和支撑平台可以在水平面内(例如,在诸如路面的水平面上)仅仅通过围绕它们旋转轴的旋转来对齐。当在非水平面(例如,有斜坡的路面)上运行时,以这样的方式不能调整驱动履带,使负载组件的倾斜得到补偿。因此,负载组件的倾斜程度与所要运行的水平面的倾斜程度相同。例如,由于负载组件倾斜,位于负载组件中的物品可能因此无意地移动,或者人可能因此跌入负载组件中,因此通用型的履带式车辆被限制在基本上水平的道路。
4.因此,本发明的目的是进一步开发一种通用履带式车辆,从而增加履带式车辆的运动自由度和敏捷度,同时防止履带式车辆过度倾斜。
5.根据本发明,该目的在通用履带式车辆中实现,其中每个驱动履带形成在相应的履带总成(caterpillar assembly)上,并且履带式车辆还具有倾斜装置和移动装置,倾斜装置用于使履带总成绕各自的倾斜轴倾斜,该倾斜轴基本上垂直于各自驱动履带的运动方向延伸;移动装置用于使履带总成在收起位置和伸展位置之间沿各自的倾斜轴移动,其中在收起位置的履带总成位于负载组件(load assembly)的底部下方,并且其中在伸展位置的履带总成伸出超过负载组件在车辆宽度方向的相对两侧。
6.因此,倾斜装置可以使履带总成围绕它们的倾斜轴旋转,该倾斜轴基本上垂直于驱动履带的运动方向延伸。通过倾斜履带总成,它们相对于负载组件和相对于履带式车辆所站立或运行的道路的方向可以改变,而无需倾斜负载组件。另外,通过履带总成的倾斜可以升高负载组件,从而在崎岖地形运行时,可以增加离地间隙。通常,在收起位置,履带总成位于负载组件的底部下方。履带总成不从负载组件的侧面伸出,而当从履带式车辆的上方观察时,履带总成被负载组件覆盖。因此,当履带总成在收起位置时,履带式车辆运动所需的空间较小。然而,移动装置可以使履带总成沿它们的倾斜轴平移,甚至移动到伸展位置。在伸展位置,履带总成不被负载组件的底部从上方覆盖,因此,履带总成可以围绕它们的倾斜轴360
°
倾斜,而不会与负载组件发生碰撞。一方面,根据本发明的履带式车辆由此可以沿着水平道路或水平布置的轨道进行水平运行。另一方面,根据本发明的履带式车辆还可以用于沿着倾斜道路或在倾斜的运行轨道上进行任何坡度的倾斜运行,而负载组件不倾斜。
因此,可以保证内部物品或人员的运输安全。
7.原则上,可以想象,根据本发明的履带式车辆仅沿水平或倾斜的道路和/或轨道直线运动。然而,有利地,根据本发明的履带式车辆还包括用于改变履带式车辆运行方向的转向装置。
8.转向装置使履带式车辆不仅可以沿直线运动,而且可以改变其在道路上的运行方向。因此,履带式车辆可以在道路上灵活运动,并实现各种驾驶操作或驾驶轨迹。
9.根据本发明的一个实施例,转向装置设计为通过驱动履带的不同旋转速度和/或旋转方向来改变履带式车辆的运行方向。
10.因此,根据本发明的履带式车辆的运行方向可以改变,例如,类似于坦克,驱动履带以不同的旋转方向和/或旋转速度运动。相比于传统的车辆转向系统,例如在乘用车(轿车)转向系统中,只有两个前轮可以转向且每个前轮的转向只能相同,履带式车辆的转弯半径可以减少,特别是增加履带式车辆的敏捷性。
11.在本发明的另一实施例中,转向装置设计为通过使履带总成围绕相应的转向轴旋转,来改变履带式车辆的运行方向。
12.通过各个履带总成围绕其转向轴单独旋转,可以灵活地改变其各自的履带角度。通过各个履带总成相对于彼此进行相应对齐,可以减小履带式车辆在转弯时的转弯半径。这也使得进行新的驾驶操作或驾驶传统车辆无法实现的轨迹成为可能。因此,当负载组件静止时,履带式车辆可以使履带总成围绕它们的转向轴90
°
旋转,以进行横向运行,在此过程中,负载组件在平面内的对齐不会改变。
13.在回缩位置,履带总成可以在前端区域或后端区域被它们各自的转向轴穿过。
14.在使履带总成转向时,履带总成围绕支点相对于道路旋转,该支点位于每个驱动履带和道路之间的接触区域形成的接触表面内。当履带总成在收起位置围绕它们各自的倾斜轴倾斜时,驱动履带上的接触表面的位置朝向履带总成的前端部或后端部改变。如果转向轴在前端或后端区域中穿过相应的履带总成,则可以避免在履带总成转向时,负载组件以类似陀螺仪的方式不合需要地(undesirably)移动。
15.根据本发明的另一实施例,履带总成在前端区域或后端区域被它们相应的倾斜轴穿过。
16.通过在履带总成的前端或后端区域布置倾斜轴,履带总成有可能在绕它们的倾斜轴旋转时站立在尖端上,从而垂直提升负载组件。尖端是履带船(caterpillar ship)未被其倾斜轴穿过的端部区域。在履带总成的回缩位置,这可以防止履带船在倾斜时与负载组件的底部发生碰撞。此外,倾斜轴的这种布置可以使履带总成在回缩位置或在伸展位置在旋转方向上倾斜一定角度,而负载组件不升高或仅升高最低程度。
17.在本发明的优选实施例中,每个履带总成的相应转向轴与其相应的倾斜轴相交。
18.当履带总成的转向轴与它们相应的倾斜轴相交时,履带总成可以倾斜,使相应驱动履带的接触表面位于被相应的转向轴和倾斜轴穿过的履带总成端部。在此配置中,转向轴、倾斜轴和驱动履带的覆盖区都在履带总成的同一端部。因此,当履带总成转向和/或倾斜时,可以确保履带式车辆和道路之间的力直接且笔直(straight)流动,并且不会出现不需要的弯矩。
19.在本发明的另一个实施例中,履带式车辆还包括夹紧装置,夹紧装置用于沿相应
的夹紧轴使并排布置在车辆宽度方向上的至少两个履带总成移动,夹紧轴基本在车辆纵向方向上延伸。
20.为了使履带式车辆能够沿垂直运行轨道装置移动,有必要将履带式车辆夹紧到轨道上。在夹紧装置的帮助下,履带总成可以沿着它们的夹紧轴相对彼此移动,并与垂直布置的运行轨道相互作用产生夹紧力。当在垂直布置的导轨上行驶时,夹紧力可防止履带总成从轨道滑脱。因此,履带式车辆夹在垂直运行轨道装置上,并且可以在垂直方向上驾驶履带式车辆。
21.根据本发明,还提出一种运行轨道装置,其包括至少两个运行轨道,两个运行轨道布置成基本彼此平行,每个运行轨道具有凸起和凹陷结构,其设计为以形状配合和/或力配合的方式与根据本发明的履带式车辆的驱动履带接合。
22.运行轨道可以布置在空间中的任何方向上,并形成预定轨道,履带式车辆可以沿着预定轨道行驶。可以在任何位置布置运行轨道,例如在建筑物上或建筑物内、在沟壑上、在陡坡上等,这在很大程度上与环境条件无关。因此,可以灵活设计履带式车辆的可能路线。当在轨道上行驶时,驱动履带与它们的结构处于形状配合和/或力配合接合状态,这确保了履带式车辆能够在运行轨道装置上安全移动,而不会从其上滑脱。
23.优选地,该结构配置成牢固的运行轨道的结构化表面(structured surface)的形式。
24.相应运行轨道的结构化表面设计成与履带式车辆的驱动履带接触,从而实现牢固的接合。特别是,当运行轨道不是水平布置而是呈陡峭角度布置时,运行轨道上的结构化表面可以防止履带式车辆的驱动履带与运行轨道失去接合,从而滑脱。因此,可提高履带式车辆在运行轨道上行驶时的安全性。
25.根据本发明的运行轨道装置还可包括至少一个倾斜运行模块,倾斜运行模块包括至少两个运行轨道,其设计为附接到周围的支撑结构上,使得它们彼此平行并以一定角度从下层跑道运行到第一上层跑道,其中第一上层跑道在相对于下层跑道的预定高度处,并且其中两个运行轨道彼此平行间隔的距离基本上等于履带总成在伸展位置车辆宽度方向上的距离,并且其中倾斜运行模块包括至少两个弯曲的过渡元件,每个过渡元件设置在相应的运行轨道的上端区域,并且设计为将相应的运行轨道连接到第一上层跑道。
26.履带式车辆可以在三维空间中沿着倾斜运行模块移动,并在位于不同高度的两条跑道之间移动。倾斜运行模块包括两个轨道,因此适合由带有两个履带总成的履带式车辆在其上行驶。为了在倾斜运行模块上行驶,履带总成处于伸展位置,并围绕其倾斜轴倾斜,以便驱动履带的位置与行驶轨道基本平行。此时,由于履带总成处于伸展位置,并且运行轨道之间的水平间隔与履带总成处于伸展位置在车辆宽度方向上的距离相同,负载组件可以在运行轨道装置之间保持在水平方向,且在轨道装置上运行时不会倾斜。过渡元件在倾斜运行模块的轨道和第一上层跑道之间形成弯曲的连接元件,从而实现履带式车辆在倾斜运行模块和第一上层跑道之间的过渡。由于过渡元件的弯曲外形,当在倾斜运行模块的轨道和第一上层跑道之间过渡时,履带总成不必克服任何边缘或类似的问题。
27.根据本发明的另一个实施例,运行轨道装置包括第一倾斜运行模块和第二倾斜运行模块,他们相对于彼此布置,使得他们各自倾斜地从下层跑道运行到第一上层跑道,第一倾斜运行模块和第二倾斜运行模块的轨道彼此基本平行,并且其中,第一倾斜运行模块和
第二倾斜运行模块水平间隔的距离基本上等于履带总成处于直线运行位置在车辆前后方向上的倾斜轴的距离。
28.由于运行轨道装置包括第一倾斜运行模块和第二倾斜运行模块,因此有四个运行轨道,它既可以由带有两个履带总成的履带式车辆驱动,也可以由带有四个履带总成的履带式车辆驱动。在该实施例中,履带式车辆包括四个履带总成,所有四个履带总成的驱动履带都与相应的运行轨道接触。同样在本实施例中,倾斜运行模块的运行轨道之间的距离与履带总成处于伸展位置在车辆宽度方向上的距离一致,并且大于负载组件的宽度。因此,当在运行轨道装置上行驶时,履带式车辆的负载组件可以安置在运行轨道之间。此外,在本实施例中,第一倾斜运行模块和第二倾斜运行模块之间的距离与履带总成处于直线行驶位置在车辆前后方向上的倾斜轴的距离一致。因此,可以以这样的方式在运行轨道装置上行驶,只有履带总成在伸展位置倾斜平行于运行轨道,而负载组件水平对齐,不倾斜。
29.原则上,运行轨道装置可以设计成仅将下层跑道与第一上层跑道连接。然而,根据本发明,也可以将多个倾斜运行模块一个接一个地布置,以连接下层跑道和第一上层跑道,并将第一上层跑道连接到布置于其上的第二上层跑道,它们的轨道成对排列,并且在一个接一个的倾斜运行模块之间设置有通道开口,其尺寸使得履带总成可以在倾斜运行位置和水平运行位置之间切换,以驶入或驶离运行轨道装置,并且在越过通道开口时,处于倾斜位置的履带总成与至少一个倾斜运行模块连续接触。
30.通过将多个倾斜运行模块一个接一个地布置,位于不同高度的跑道可以相互连接。因此,履带式车辆可以在不同高度的跑道上灵活行驶,其结果是,可以驾驶履带式车辆实现不同的驾驶操作和驾驶轨迹。当在运行轨道装置上行驶时,履带总成可以越过通道开口,并在它们到达通道开口时,保持在倾斜位置,继续倾斜行驶。通道开口的尺寸使得每个驱动履带在越过它时,与一个接一个布置的轨道中的至少一个不间断地接触。因此,在越过通道开口时,可以确保履带总成和运行轨道之间连续接合,并且可以防止履带式车辆滑脱。然而,通道开口也可以使履带式车辆能够驶离运行轨道装置,驶入跑道或从跑道驶入运行轨道装置。当它们到达通道开口时,履带总成在水平运行位置和倾斜运行位置之间切换,因此可以开始或结束倾斜行驶。
31.根据本发明的另一个实施例,运行轨道装置包括至少一个垂直运行模块,垂直运行模块包括彼此平行布置的第一对运行轨道和第二对运行轨道,并且设计为以形状配合和/或力配合的方式与根据本发明的履带式车辆的驱动履带接合,并且附接到周围的支撑结构上,使得它们从下层跑道垂直延伸到第一上层跑道,第一上层跑道在相对于下层跑道的预定高度处,并且其中,垂直运行模块具有至少两个过渡元件,过渡元件适于在倾斜在第一上层跑道的预定高度处,靠近运行轨道的上端区域,使得每个过渡元件的结构与相应的运行轨道的结构相对,其中,每对运行轨道的运行轨道彼此间隔的距离基本上等于履带总成处于伸展位置在车辆宽度方向上的距离,并且其中,第一对运行轨道与第二对运行轨道间隔的距离基本上与履带总成处于直线运行位置在车辆纵向方向上的倾斜轴的距离一致。
32.沿着垂直运行模块,履带式车辆可以在三维空间内在垂直方向上移动,并在位于不同高度的两条跑道之间移动。由于运行轨道装置包括第一对运行轨道和第二对运行轨道,它尤其可以由带有四个履带总成的履带式车辆驱动。为了在垂直运行模块上行驶,履带总成处于伸展位置并倾斜,使得每个驱动履带与相应的运行轨道形状配合和/或力配合接
合。因此,当在运行轨道装置上行驶时,负载组件可以在轨道之间水平对齐安置,并且在此过程中不会倾斜。由于第一和第二对运行轨道的垂直布置,运行轨道装置节省了空间,并可用于不同的地点,例如,在建筑物上或建筑物内、储存架、山脉、施工工地等。当在建筑物内使用时,运行轨道装置可与履带式车辆一起作为一种电梯。垂直运行模块包括至少两个过渡元件,过渡元件与运行轨道不是整体形成的,而是与第一上层跑道上的运行轨道的上端区域相对设置。这些可以使履带式车辆在垂直运行模块和第一上层跑道之间过渡。
33.根据一个实施例,该结构可布置在每个运行轨道上,使得当履带总成处于垂直运行位置通过夹紧装置在该结构的方向上移动时,履带总成和运行轨道之间在水平方向上产生夹紧力或张力。
34.为了在垂直运行模块上行驶,履带总成处于垂直运行位置,其中履带总成相对于水平运行位置绕它们的倾斜轴倾斜90
°
。在这个位置,必须在履带总成和运行轨道装置之间施加足够大的夹紧力和张力,以使履带总成不会从轨道上滑脱。在垂直运行位置,在夹紧装置的帮助下,履带总成可以在该结构的方向上移动,因此在履带总成和运行轨道之间产生夹紧力或张力。该夹紧力或张力提供了必要的保持力,这对于履带式车辆能够在垂直运行模块上安全行驶而不打滑是必要的。
35.原则上,运行轨道装置可设计为仅将下层跑道与第一上层跑道连接。然而,也可以将多个垂直运行模块一个接一个地布置,以将下层跑道连接到第一上层跑道,并将第一上层跑道连接到布置在其上方的第二上层跑道,使它们的运行轨道彼此成对对齐,并在上述彼此布置的垂直运行模块之间设置通道开口,其尺寸可以使履带总成在垂直运行位置和水平运行位置之间切换,以进入或退出运行轨道装置,并且当处于垂直运行位置越过通道开口时,履带总成与至少一个垂直运行模块连续接触。
36.通过将多个垂直运行模块一个接一个地布置,可以将几个处于不同高度的跑道彼此连接。因此,履带式车辆可以在不同高度的跑道上灵活行驶,其结果是,可以驾驶履带式车辆实现不同的驾驶操作和驾驶轨迹。例如,运行轨道装置可以与履带式车辆一起在建筑物上或建筑物内作为一种电梯运转,该电梯将几个楼层相互连接起来。当在运行轨道装置上行驶时,履带总成可以越过通道开口,并在到达通道开口时,保持在倾斜垂直运行位置,继续垂直行驶。通道开口的尺寸使得每个驱动履带在越过它时,与一个接一个布置的运行轨道中的至少一个不间断地接触。因此,在越过通道开口时,可以确保履带总成和运行轨道之间连续接合,并且可以防止履带式车辆滑脱。然而,通道开口也可以使履带式车辆驶离运行轨道装置驶入跑道,或从跑道驶入运行轨道装置。到达通道开口后,履带总成在水平运行位置和垂直运行位置之间切换,因此可以开始或结束垂直行驶。
37.此外,根据本发明提出了一种车辆系统,包括根据本发明的履带式车辆和根据本发明的运行轨道装置。
38.此外,本发明提出了一种用根据本发明的履带式车辆在根据本发明的运行轨道装置上行驶的方法,该方法包括以下步骤:使履带式车辆接近下层跑道或上层跑道上的运行轨道装置,将履带总成沿着相应的倾斜轴从回缩位置移动到伸展位置,将履带总成绕相应的倾斜轴倾斜预定角度,使履带总成从水平运行位置到倾斜运行位置或垂直运行位置,通过将履带总成的驱动履带与相应运行轨道的结构接合,进入运行轨道装置,在下层跑道区域和上层跑道区域之间的运行轨道装置上行驶,使履带总成的驱动履带和相应过渡元件的
结构接合,在过渡元件上行驶,并将履带总成绕相应的倾斜轴倾斜至水平运行位置,并从运行轨道装置中出来,并行驶在上层跑道或下层跑道上。
39.当执行根据本发明的方法时,履带式车辆最初在任一跑道上行驶并接近运行轨道装置。当履带式车辆接近下层跑道时,履带总成可以处于回缩位置和伸展位置。当履带总成处于回缩位置时,履带式车辆会在运行轨道之间通过,而不会在运行轨道装置上行驶。另一方面,如果履带总成在接近运行轨道装置时移动到伸展位置,履带式车辆可以开始沿着运行轨道装置行驶。当履带式车辆接近其中一条上层跑道上的运行轨道装置时,履带总成可以再次处于回缩位置或伸展位置。但是,履带式车辆在到达相应跑道的开口之前,必须将履带总成移动到伸展位置,以避免履带式车辆落入开口中。如果履带总成保持在水平运行位置且不倾斜,履带式车辆也可以行驶通过其中一条上层跑道上的运行轨道装置。通过相应的倾斜履带总成,可以开始沿运行轨道装置行驶。将处于伸展位置的履带总成绕它们相应的倾斜轴倾斜至倾斜运行位置或垂直运行位置。在倾斜运行位置和垂直运行位置,履带总成和相应的运行轨道平行布置。在进入运行轨道装置的步骤中,这使得驱动履带和运行轨道之间的接合尽可能的安全和牢固。另一方面,负载组件保持对齐,甚至当履带总成倾斜至倾斜或垂直运行位置时,负载组件也不倾斜。在运行轨道装置上行驶的步骤中,由于驱动履带和运行轨道之间牢固的接合,可以确保安全的倾斜行驶或垂直行驶,并且驱动履带可以避免从运行轨道上滑脱。当履带式车辆到达预定跑道时,行驶渡过过渡元件,并且履带总成从倾斜或垂直运行位置倾斜回到水平运行位置。然后,履带式车辆离开运行轨道装置并在预期的跑道上行驶。因此,使用根据本发明的方法,可以实现根据本发明的履带式车辆的有效倾斜行驶和/或垂直行驶。该方法还使负载组件能够在几条跑道之间安全运输,而无需倾斜负载组件。
40.垂直行驶期间,将履带总成的驱动履带和相应过渡元件的结构接合的步骤最好包括以下子步骤:通过其夹紧装置沿着夹紧轴移动至少一个履带总成,夹紧轴在相应运行轨道的结构和相应过渡元件的结构之间,并且至少三个履带总成与相应运行轨道的结构或相应的过渡元件之一保持接合。
41.在垂直运行模块和跑道之间的过渡处,必须确保履带式车辆不会因与运行轨道失去接合而在运行轨道装置内滑动或掉落。因此,在这个过渡过程中,至少一个履带总成沿相应运行轨道的结构和相应的过渡元件之间的夹紧轴移动。然而,在任何时候,保持至少三个履带总成与相应运行轨道的结构、相应的过渡元件或跑道的接合。因此,可以始终保证履带总成和垂直运行模块的轨道之间的安全接合,并可以防止履带式车辆在运行轨道装置内滑动或掉落。这提高了在垂直运行模块上行驶时的安全性。
42.在离开运行轨道装置之后,根据本发明的方法最好包括沿着相应的倾斜轴从伸展位置重新安置到回缩位置的步骤。
43.在履带式车辆到达预定跑道之后,当履带总成再次移动到回缩位置时,履带式车辆在跑道上行驶所需的车辆宽度方向上的空间较小。此外,在收起位置由于履带总成在负载组件底部的下方,可以降低履带总成与周围物体或结构之间碰撞的可能性。
44.下面参考作为非限制性示例的附图解释本发明的实施例。如下所示:
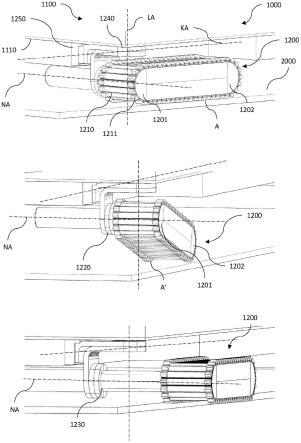
45.图1a是根据本发明的履带式车辆履带总成在回缩位置和非倾斜位置的示意性立体图。
46.图1b是图1a中的履带总成在回缩位置和倾斜位置的示意性立体图。
47.图1c是图1a中的履带总成在伸展位置和非倾斜位置的示意性立体图。
48.图2a示出了根据本发明的履带式车辆的示意性立体图,两个履带总成位于根据本发明的具有倾斜运行模块的运行轨道装置上倾斜行驶的开始部分。
49.图2b示出了图2a中履带式车辆在倾斜行驶过程中越过两组倾斜行驶组件之间的通道开口时的示意性立体图。
50.图3示出了根据本发明的运行轨道装置的示意性侧视图,该运行轨道装置将几条跑道与倾斜运行模块连接,以及履带式车辆在运行轨道装置的倾斜运行模块上行驶时的不同位置。
51.图4示出了根据本发明的履带式车辆的示意性立体图,该履带式车辆具有四个履带总成和根据本发明的运行轨道装置,该运行轨道装置用倾斜运行模块将几个跑道相互连接。
52.图5a示出了当履带式车辆接近下层跑道上的运行轨道装置时,从后面看,根据图4中本发明的履带式车辆的示意图。
53.图5b类似于图5a,是履带式车辆在履带总成已经沿着它们的倾斜轴从回缩位置移动到伸展位置后的示意图。
54.图5c类似于图5a和5b,示出了当在下层跑道区域和上层跑道区域之间的运行轨道装置上行驶时,履带式车辆的示意图。
55.图6a示出了图4履带式车辆在倾斜行驶期间越过倾斜行驶组件之间的通道开口时的示意性侧视图。
56.图6b类似于图6a,示出了当行驶在过渡元件上并绕相应的倾斜轴倾斜履带总成至水平运行位置时,履带式车辆的示意性局部侧视图。
57.图6c类似于图6a和6b,示出了当退出运行轨道装置并在上层跑道上行驶时,履带式车辆的示意性侧视图。
58.图7示出了根据本发明的履带式车辆的示意性立体图,该履带式车辆具有四个履带总成和根据本发明的运行轨道装置,该运行轨道装置将带有垂直运行模块的几个跑道相互连接。
59.图8a是履带总成绕相应的倾斜轴从水平运行位置倾斜到垂直运行位置时,图7的履带式车辆的示意性侧视图。
60.图8b类似于图8a,是当履带总成的驱动履带与相应的运行轨道的结构接合时,履带式车辆的示意性侧视图。
61.图8c类似于图8b,示出了在垂直行驶过程中,当越过一个布置在另一个上方的两组垂直运行模块之间的通道开口时,履带式车辆的示意性侧视图。
62.图8d类似于图8c,示出了当车辆宽度方向上彼此相邻布置的两个履带总成绕相应的倾斜轴从垂直运行位置倾斜至水平运行位置时,履带式车辆的示意性侧视图。
63.图8e类似于图8d,示出了当通过其夹紧装置沿相应运行轨道的结构和相应过渡元件的结构之间的夹紧轴移动至少一个履带总成时,履带式车辆的示意性侧视图。
64.图8f类似于8e,示出了当退出运行轨道装置并在上层跑道行驶时,履带式车辆的示意性侧视图。
65.图9a是在回缩位置和非倾斜位置的履带总成的示意性立体图。
66.图9b是图9a中履带总成在绕其转向轴旋转和绕其倾斜轴俯仰的组合过程中的示意性立体图。
67.图9c是图9a中履带总成处于横向位置在绕其转向轴旋转和绕其倾斜轴倾斜组合之后的示意性立体图。
68.下面参考图1a至图1c,描述履带总成1200的运动自由度。图1a示出了根据本发明的履带式车辆1000的履带总成1200在回缩位置和非倾斜位置的示意性立体图。图1b示出了图1a的履带总成1200在回缩位置和倾斜位置的示意性立体图,图1c示出了图1a的履带总成1200在伸展位置和非倾斜位置的示意性立体图。应注意,图1a至1c仅示出了履带式车辆1000的履带总成1200的详细视图。然而,根据本发明的履带式车辆1000可以包括多个履带总成1200,例如两个或四个履带总成1200。下面将详细描述履带总成1200,这些解释适用于履带式车辆1000的所有履带总成1200。
69.履带总成1200布置在履带式车辆1000的负载组件1100的底部1110上。如图1a至1c所示,在根据本发明的履带式车辆1000的实施例中,履带总成1200具有细长外形,在前端区域1201和后端区域1202处是圆的。履带总成1200包括驱动履带1210,该驱动履带1210沿圆周设置在履带总成1200上,并沿履带总成1200的轨道可移动地支撑。驱动履带1210站立于跑道2000的覆盖区a上。在图1a至1c所示的实施例中,驱动履带1210形成为旋转链,其包括若干个链节,并且在其外表面上具有凸起和凹陷的结构1211。这种类型的驱动履带1210与例如那些坦克或雪地履带式车辆中使用的相类似。驱动装置1200的驱动履带1210可以用驱动单元(未示出)驱动,同时沿着履带总成1200周围的轨道移动,并在接触表面a的区域的跑道2000上滚动。驱动单元的示例可以是电动马达、内燃机或类似于上面已经解释过的de202020100256u1的线性马达。通过驱使驱动履带1210,使整个履带式车辆1000处于运动状态。应注意,驱动履带1210可沿履带总成1200在任一旋转方向上移动,因此履带式车辆1000可以在不同方向上移动。
70.履带总成1200还包括倾斜装置。倾斜装置包括倾斜执行器1220,倾斜执行器1220使履带总成1200能够绕倾斜轴na旋转,倾斜轴na基本垂直于驱动履带1210的旋转方向延伸,并在前端区域1201穿过履带总成1200,如图1b所示。倾斜执行器1220的示例可以是液压、气动和/或电动旋转执行器。如图1b所示,当履带总成1200绕倾斜轴na旋转时,覆盖区a
′
向履带总成1200的后端区域1202移动,并且由于履带总成1200的细长外形,比处于非倾斜位置的覆盖区a(如图1a所示)要小。由于履带总成1200在倾斜位置的接触表面a
′
较小,当驱使驱动履带1210时,驱动履带1210和跑道2000之间的摩擦较小,因此履带式车辆1000可以更有效地推进。履带式车辆1000的所有履带总成1200的相应倾角也会改变它们倾斜轴na和跑道2000之间的垂直距离,因此提升整个负载组件1100。例如,通过提升负载组件1100,在崎岖地形上行驶时可以增加离地间隙。也可以绕倾斜轴na在逆时针旋转方向上旋转履带总成1200,尽管接触表面a
′
向履带船1200的前端区域1201移动,并且负载组件1100的底部1110和跑道2000之间的距离基本保持不变。
71.履带总成1200还包括移动装置。移动装置包括移动执行器1230,移动执行器1230使履带总成1200沿倾斜轴na从如图1a所示的回缩位置移动到如图1c所示的伸展位置。移动执行器1230的示例可以是液压、气动和/或电动线性执行器。当履带总成1200移动到伸展位
置时,从上方看,履带总成1200在车辆宽度方向上移动超出负载组件1100的一侧。在伸展位置,履带总成1200可以绕倾斜轴na旋转360
°
,因为履带总成1200在横向上超出了负载组件1100,并且绕倾斜轴na的任意旋转期间,不会与负载组件1100的底部1110碰撞。
72.如图1a至1c所示的履带总成1200还包括转向装置。转向装置包括转向执行器1240,其可以使履带总成1200绕转向轴la旋转。转向执行器1240使履带总成1200的前束角能够在跑道2000上改变,但图1a至1c中未显示。转向执行器1240的示例可以是电动、液压和/或气动旋转马达。转向轴la基本垂直于负载组件1100的底部1110延伸,并在前端区域1201穿过履带总成1200。应注意,转向轴la和倾斜轴na在前端区域1201相交。因此,当履带总成1200处于倾斜位置时,减小的覆盖区a
′
位于履带总成的前端区域1201,转向轴la也与覆盖区表面a
′
相交,并且履带总成1200可以绕转向轴la旋转。不引起履带式车辆1000相对于跑道2000的回转运动。
73.此外,履带总成1200包括夹紧装置。夹紧装置包括夹紧执行器1250,夹紧执行器1250使履带总成1200能够沿夹紧轴ka移动,夹紧轴ka基本上在车辆的纵向方向上延伸。夹紧致动器1250的示例可以是电动、气动和/或液压驱动的线性导轨。在实施例中,履带式车辆1000包括四个履带总成1200,这些履带总成1200在车辆纵向方向上(即一个布置在另一个后面)相对彼此的距离可借助于夹紧执行器1250来改变。例如,这对于沿垂直运行轨道装置运动是必要的,下面将详细描述。在夹紧执行器1250的帮助下,通过在垂直运行轨道的方向上移动履带总成1200,可在履带式车辆1000和与轨道相互作用的运行轨道装置之间产生夹紧力,从而确保在垂直布置的轨道上行驶时,驱动履带1210牢固的夹住,由此防止打滑。
74.由于驱动履带1210、倾斜执行器1220、移动执行器1230、转向执行器1240和夹紧执行器1250使大量的运动自由度成为可能,如图1a、1b和1c所示实施例的履带式车辆1000是灵活的,并且可以在跑道2000的水平范围内实现各种驾驶操作和驾驶轨迹。应注意,除了上述转向执行器1220、移动执行器1230、转向执行器1240和夹紧执行器1250外,倾斜装置、移动装置、转向装置和夹紧装置通常包括其他元件,例如接线或电子控制单元。此外,根据本发明的履带式车辆1000的履带总成1200可以在运行轨道装置上行驶,以便在不同高度的几条跑道上行驶,这将在下文详细描述。
75.如图2a和2b示出了根据本发明的这种运行轨道装置3000的简单实施例。图2a示出了根据本发明履带式车辆1000a的示意性立体图,两个履带总成1200a位于根据本发明的具有倾斜运行模块3100,3100
′
的运行轨道装置3000上倾斜行驶的开始部分。图2b示出了图2a的履带式车辆1000a在倾斜行驶过程中,越过两组倾斜运行模块3100
′
,3100
″
之间的通道开口3130
″
时的示意性立体图。
76.图2a、图2b和图3所示的运行轨道装置3000包括倾斜运行模块3100,3100
′
,3100
″
,它们将下层跑道2000和第一上层跑道2000
′
、第一上层跑道2000
′
和第二上层跑道2000
″
以及第二上层跑道2000
″
和第三上层跑道2000
″′
连接起来。例如,这种运行轨道装置3000可以用于连接建筑物内的不同楼层。例如,当连接储存架系统中的不同层或在陡峭的斜坡或山脉上时,出现其他可能的用途。
77.每个倾斜运行模块3100,3100
′
,3100
″
包括两个运行轨道3110,3110
′
,3110
″
,它们在跑道2000,2000
′
,2000
″
,2000
″′
之间倾斜运行,并且间隔的距离基本上与履带总成1200a处于伸展位置在车辆宽度方向上的距离相一致。运行轨道3110,3110
′
,3110
″
附接到周围的
支撑结构t并且彼此平行运行。在一个表面上,每个运行轨道3110,3110
′
,3110
″
具有带有凸起和凹陷的结构3111,3111
′
,3111
″
,其设计成与驱动履带1210的结构1211形成形状配合的接合。运行轨道3110,3110
′
,3110
″
相对于彼此放置,使得它们的结构3111,3111
′
,3111
″
彼此成对对齐。过渡元件3120,3120
′
,3120
″
设置在每个运行轨道3110,3110
′
,3110
″
的上端区域,相应的过渡元件3120,3120
′
,3120
″
将运行轨道3110和第一上层跑道2000
′
、运行轨道3110
′
和第二上层跑道2000
″
以及运行轨道3110
″
和第三上层跑道2000
″′
连接起来,并且过渡元件3120,3120
′
,3120
″
还具有凸起和凹陷结构,为了清晰起见,未示出。倾斜运行模块3100,3100
′
,3100
″
的运行轨道3110,3110
′
,3110
″
彼此不是连续连接的,而是具有通道开口3130
′
,3130
″
,通道开口3130
′
,3130
″
在跑道2000
′
,2000
″
,2000
″′
的区域内中断运行轨道3110,3110
′
,3110
″
。应注意,在本实施例中,在下层跑道2000和倾斜运行模块3100的运行轨道3110之间没有设置通道开口,因为运行轨道3110和下层跑道2000之间需要连续连接,以使履带总成1200a倾斜。
78.特别地,本实施例所示的运行轨道装置3000设计成,由具有根据图1a至1c所示实施例的两个履带总成1200a的履带式车辆1000a在其上行驶,两个履带总成1200a布置在负载组件1100a的相对两侧上,下面将基于图2a和2b详细说明。图2a示出了履带式车辆1000a沿着运行轨道装置3000倾斜行驶的开始部分。在倾斜行驶的开始部分,履带式车辆1000a在下层跑道2000上朝向倾斜运行模块3100运行。在下层跑道2000上,如果履带总成1200a保持在回缩位置并且没有移动到伸展位置,履带式车辆1000a可以在运行轨道3110之间通过运行轨道装置3000,并继续在下层跑道上行驶。然而,为了开始沿着运行轨道装置3000倾斜行驶,履带总成1200a移动到伸展位置。当行驶到运行轨道3110上时,履带总成1200a从非倾斜的水平运行位置绕它们的倾斜轴na倾斜,使得它们平行于倾斜运行轨道3110对齐,这在下文中被称为倾斜运行位置。由于运行轨道3110之间的距离,负载组件1100a可以安置在运行轨道3110之间,并且在整个倾斜行驶期间不倾斜,而是保持朝向基本水平。上层跑道2000
′
,2000
″
,2000
″′
还包括开口2100
′
,2100
″
,2100
″′
,其尺寸使得当负载组件1100a以其非倾斜方向在运行轨道3110,3110
′
,3110
″
之间行驶时,负载组件1100a移动不会与第二上层跑道2000
″
碰撞。因此,当在运行轨道装置3000上行驶时,即使是陡峭的斜坡,也可以防止内部物品不期望的移动或者内部人员不期望的跌落。然而,应注意,由于开口2100
′
,2100
″
,2100
″′
,当履带式车辆1000a接近上层跑道2000
′
,2000
″
,2000
″′
之一上的运行轨道装置3000时,履带总成1200a必须处于伸展位置,以防止履带式车辆1000a落入相应的开口2100
′
,2100
″
,2100
″′
。具有凸起和凹陷的结构1211a位于驱动履带1210a的外表面上,与具有运行轨道3110的结构3111的接触表面a的区域接合,类似于齿轮连接。这在驱动履带1210a和运行轨道3110之间产生了形状配合的接合,这防止了驱动履带1210a从运行轨道3110上滑脱,并且因此能够沿着运行轨道3110安全行驶。
79.图2b示出了履带式车辆1000a倾斜行驶期间的情境,其中履带式车辆1000a越过倾斜运行模块3100
′
,3100
″
之间的通道开口3130
″
,以在运行轨道3110
″
上继续倾斜行驶。通道开口3130
″
的尺寸是这样的,一方面,他们可以离开运行轨道装置3000,并在图2b的第二上层跑道2000
″
上行驶,其描述如下。此外,通道开口3130
″
的尺寸是这样的,可以使履带总成1200a跨过倾斜运行模块3100
″
的运行轨道3110
″
。在运行轨道3110
′
和运行轨道3110
″
之间的这种过渡中,履带总成1200a保持在倾斜运行位置,并且没有倾斜回水平运行位置。这确
保了每个驱动履带1210a与至少一个运行轨道3110
′
,3110
″
连续接触。因此,即使在两组倾斜运行模块3100
′
,3100
″
之间过渡的期间,驱动履带1210a的结构1211a与相应运行轨道3110
′
,3110
″
的结构3111
′
,3111
″
的至少一个之间的接合也可以一直保持,并且可以防止驱动履带1210a从运行轨道3110
′
,3110
″
上滑脱。应注意,履带式车辆1000a也可以从上层跑道2000
′
,2000
″
,2000
″′
之一开始倾斜行驶,并基于此,可以通过运行轨道装置3000安全地到达任一更高层或更低层的其他跑道,负载组件1100a不会发生不期望地倾斜。
80.如上所述,任意数量的跑道2000,2000
′
,2000
″
,2000
″′
可以与根据本发明的倾斜运行模块3100,3100
′
,3100
″
以一定角度相互连接,并且可以由根据本发明的履带式车辆1000a在其上行驶。如图3所示的实施例中,下层跑道2000连接到三个上层跑道2000
′
,2000
″
,2000
″′
。示出了履带式车辆1000a从下层跑道2000到第三上层跑道2000
″′
的行驶过程中的各种位置。如图3的右下部分所示,履带式车辆1000a首先在下层跑道2000上运行,并在履带总成1200a处于水平行驶位置时接近运行轨道装置3000。接下来,类似于图2a所示,通过将履带总成1200a移动到伸展位置,并从水平运行位置倾斜到倾斜运行位置来开始倾斜行驶。此时,履带总成1200a的驱动履带1210a与倾斜运行模块3100的运行轨道3110接触,并在驱动履带1210a的结构1211a与运行轨道3110的结构3111之间接合。
81.如上所述,任意数量的跑道2000,2000
′
,2000
″
,2000
″′
可以与根据本发明的倾斜运行模块3100,3100
′
,3100
″
以一定角度相互连接,并且可以由根据本发明的履带式车辆1000a在其上行驶。如图3所示的实施例中,下层跑道2000连接到三个上层跑道2000
′
,2000
″
,2000
″′
。示出了履带式车辆1000a从下层跑道2000到第三上层跑道2000
″′
的行驶过程中的各种位置。如图3的右下区域所示,履带式车辆1000a首先在下层跑道2000上运行,并在履带总成1200a处于水平行驶位置时接近运行轨道装置3000。接下来,类似于图2a所示,通过将履带总成1200a移动到伸展位置,并从水平运行位置倾斜到倾斜运行位置来开始倾斜行驶。此时,履带总成1200a的驱动履带1210a与倾斜运行模块3100的运行轨道3110接触,并在驱动履带1210a的结构1211a与运行轨道3110的结构3111之间接合。
82.图3所示的下一个位置示出了履带式车辆1000a在第二上层跑道2000
″
的水平高度处越过通道开口3130
″
,与图2b所示相似。履带总成1200a保持在倾斜运行位置,并且在越过通道开口3130
″
时,与运行轨道3110
′
,3110
″
中的至少一个连续接触。如图3左上角所示,履带式车辆1000a的位置示出了履带式车辆1000a在离开第三上层跑道2000
″
上的运行轨道装置3000之后,履带总成1200a再次从倾斜运行位置倾斜到水平运行位置。在图3所示的履带式车辆1000a的每个位置中,确保负载组件1100a不会发生不期望地倾斜,而是保持朝向基本水平。此外,由于驱动履带1210a的结构1211a与运行轨道3110,3110
′
,3110
″
的结构3111,3111
″
,3111
″
之间的接合,可以确保安全的倾斜行驶,并且可以防止履带式车辆1000a打滑。应注意,从每条跑道2000,2000
′
,2000
″
,2000
″′
开始,履带式车辆1000a可以使用运行轨道装置3000移动到任一位于更高或更低的其他跑道2000,2000
′
,2000
″
,2000
″′
。因此,履带式车辆1000a可以在三维空间内在不同的跑道2000,2000
′
,2000
″
,2000
″′
之间灵活移动,除了在跑道内有多个运动自由度外,负载组件1100a不会有不期望的倾斜。
83.在上述实施例中,考虑了简单的情况,即履带式车辆1000a在负载组件1100a沿车辆宽度方向的相对两侧具有两个履带总成1200a,并且可以在运行轨道装置3000上行驶,每个运行轨道装置3000具有两个轨道3110,3110
′
,3110
″
。然而,根据本发明的另一实施例,还
可以在根据图1a至1c中描述的实施例的履带式车辆1000b的底部1110b上设置四个履带总成1200b。四个履带总成1200b设置在负载组件1100b的底部1110b的拐角区域,类似于乘用车车轮的布置。
84.图4示出了根据本发明的这种履带式车辆1000b的示意性立体图,履带式车辆1000b具有四个履带总成1200b和根据本发明的运行轨道装置4000,运行轨道装置4000用倾斜运行模块4100,4200,4100
′
,4200
′
,4100
″
,4200
″
将几个跑道2000,2000
′
,2000
″
,2000
″′
相互连接。
85.倾斜运行模块4100,4200,4100
′
,4200
′
,4100
″
,4200
″
与图2a,2b和3所示的倾斜运行模块3100,3100
′
,3100
″
相似。这就是为什么下面省略了对类似元件的详细描述。然而,如图4所示,第一倾斜运行模块4100和第二倾斜运行模块4200设置在两条跑道之间,用于两条跑道的斜向连接,例如在下层跑道2000和第一上层跑道2000
′
之间。每个第一倾斜运行模块4100,4100
′
,4100
″
与相应的第二倾斜运行模块4200,4200
′
,4200
″
水平间隔的距离基本上等于履带总成1200b处于直行位置在车辆纵向方向上的倾斜轴na的距离。换言之,当履带式车辆1000b倾斜行驶时,四个履带总成1200b中的每一个分配到运行轨道4110,4210,4110
′
,4210
′
,4110
″
,4210
″
。在每个运行轨道4110,4210,4110
′
,4210
′
,4110
″
,4210
″
的上端区域,有过渡元件4120,4220,4120
′
,4220
′
,4120
″
,4220
″
将运行轨道4110,4210和第一上层跑道2000
′
、运行轨道4110
′
,4210
′
和第二上层跑道2000
″
以及运行轨道4110
″
,4210
″
和第三上层轨道2000
″′
连接起来,并且还具有凸起和凹陷的结构,为清晰起见未示出。运行轨道4110,4110
′
,4110
″
或运行轨道4210,4210
′
,4210
″
的一个布置在另一个之上,使得它们的结构4111,4111
′
,4111
″
,4211,4211
′
,4211
″
成对对齐。通道开口4130,4230,4130
′
,4230
′
,4130
″
,4230
″
设置在彼此对齐的每对运行轨道之间。通道开口4130,4230,4130
′
,4230
′
,4130
″
,4230
″
在成对对齐的运行轨道之间形成一种中断。此外,上层跑道2000
′
,2000
″
,2000
″′
包括开口2100
′
,2100
″
,2100
″′
,其尺寸使得负载组件1100b处于其非倾斜方向在倾斜运行模块4100,4100
′
,4100
″
上行驶时移动穿过开口2100
′
,2100
″
,2100
″′
,而不会与上层跑道2000
′
,2000
″
,2000
″′
发生碰撞。与图2a,2b,3所示的运行轨道装置3000相比,在运行轨道装置4000中,在下层跑道2000与第一倾斜运行模块4100和第二倾斜运行模块4200的运行轨道4110,4210之间还设置有通道开口4130,4230。因此,履带总成1200b处于伸展位置也可以通过下层跑道2000上的通道开口4130,4230。
86.在图5a至5c中,当从履带式车辆1000b后面观察时,示出了开始在运行轨道装置4000上倾斜行驶时,履带式车辆1000b的不同位置。图5a示出了当从后面观察时,当履带式车辆1000b接近下层跑道2000上的运行轨道装置4000时,根据图4中本发明的履带式车辆1000b的示意图。图5b类似于图5a,示出了履带总成1200b在沿着它们的倾斜轴na从回缩位置移动到伸展位置之后,履带式车辆1000b的示意图,图5c类似于图5a和5b,示出了当在下层跑道2000的区域和上层跑道2000
′
的区域之间的运行轨道装置4000上行驶时,履带式车辆1000b的示意图。应注意,在图5a至5c中,在图5a至5c中,仅示出了运行轨道装置4000的部分,以下说明也适用于设置在其上方的运行轨道装置4000的区域。
87.当驶入运行轨道装置4000时,处于水平运行位置的履带式车辆1000b的前两个履带总成1200b首先通过下层跑道2000和第二倾斜运行模块的运行轨道4210之间的通道开口4230,并接近第一倾斜运行模块4100的运行轨道4110。负载组件1100b接收在运行轨道
4110,4210之间并且保持在其水平方向。应注意,当通过下层跑道2000上的通道开口4230时,履带总成1200b可以处于回缩位置或伸展位置,图5a中说明了前一种情况。然而,在履带式车辆1000b可以在运行轨道装置4000上开始倾斜行驶之前,履带总成1200b借助于它们的移动执行器1230b移动到伸展位置,这在图5b中得到说明。为了行驶到运行轨道4110,4210上,履带总成1200b从非倾斜的水平运行位置开始绕它们的倾斜轴na倾斜,使得它们平行于倾斜运行轨道4110,4210对齐,并处于倾斜运行位置。因为根据本实施例的履带式车辆1000b包括四个履带总成1200b,可以使用倾斜执行器1220b将履带总成1200b从水平运行位置倾斜到倾斜运行位置,而无需使负载组件1100b倾斜,甚至还未与行驶轨道4110,4210接合。在倾斜运行位置,履带总成1200b继续接近第一和第二倾斜运行模块4100,4200的运行轨道4110,4210,直到驱动履带1210b的结构1211b与运行轨道4110,4210的结构4111,4211形状配合接触。随后驱动履带1210b绕相应的履带总成1200b的运动使履带总成1200b沿着运行轨道4110,4210运动,从而使履带式车辆1000b倾斜行驶,这在图5c中得到说明。履带总成1200b和倾斜运行模块4100,4200之间的形状配合接合使得履带式车辆1000b能够沿着运行轨道装置安全地移动,并且防止驱动履带1210b从运行轨道4110,4210上滑脱。如图5a至5c所示,由于第一倾斜运行模块4100,4100
′
,4100
″
的运行轨道4110,4110
′
,4110
″
与第二倾斜运行模块的运行轨道4210,4210
′
,4210
″
之间的距离,负载组件1100b被接收在运行轨道之间,并且在整个倾斜行驶期间不会倾斜。因此,即使在具有陡峭斜坡的运行轨道装置上行驶时,也可以防止内部物品不期望的移动或内部人员不期望的跌落。
88.履带式车辆1000b可以在运行轨道装置4000的帮助下,在任何跑道2000,2000
′
,2000
″
,2000
″′
之间行驶。如果履带式车辆1000b要在倾斜行驶期间通过跑道,则履带总成1200b必须通过两对对齐的运行轨道之间的通道开口,这在图6a中作为示例示出。图6a示出了图4的履带式车辆1000b在倾斜行驶期间越过倾斜行驶组件4100,4200,4100
′
,4200
′
之间的通道开口4130
′
,4230
′
时的示意性侧视图。
89.在倾斜行驶期间,履带式车辆1000b沿运行轨道4110,4210行驶,驱动履带1210b的结构1211b与运行轨道4110,4210的结构4111,4211接合。然而,当到达第一上层跑道2000
′
时,履带总成1200b没有倾斜回到水平行驶位置,因此保持在倾斜行驶位置继续倾斜行驶。因此,未在过渡元件4120,4220上行驶。相反,履带式车辆1000b继续在运行轨道装置4000中行驶,并且横穿倾斜运行模块4100,4200和倾斜运行模块4100
′
,4200
′
之间的通道开口4130
′
,4230
′
。如图6a所示,通道开口4130
′
,4230
′
的尺寸是这样的,每个驱动履带1210b在越过通道开口4130
′
,4230
′
时与至少一个运行轨道4110,4210,4110
′
,4210
′
始终接触。因此,每个驱动履带1210b的结构1211b与运行轨道4110,4110
′
,4210,4210
′
的相应结构4111,4111
′
,4211,4211
′
的形状配合接合可以始终保持,并且当越过通道开口4130
′
,4230
′
时,也可以确保履带式车辆1000b的安全倾斜行驶。在越过通道开口4130
′
,4230
′
之后,履带式车辆可以在运行轨道4110
′
,4210
′
上继续倾斜行驶,并继续向要到达的跑道方向行驶。
90.当履带式车辆1000b已经到达期望的跑道时,它从运行轨道装置4000移动到跑道2000
″
上,以便随后能够在跑道2000
″
上行驶,这在图6b和6c中示出。图6b类似于图6a,示出了当行驶在过渡元件4120
′
上并绕相应的倾斜轴na倾斜履带总成1200b至水平运行位置,履带式车辆1000b的示意性局部侧视图。图6c类似于图6a和6b,示出了当退出运行轨道装置4000并在上层跑道2000
″
上行驶时,履带式车辆1000b的示意性侧视图。
91.与图6a所示的不同,图6b和6c中的履带式车辆1000b不越过通道开口4130
″
。相反,它离开运行轨道装置4000并行驶到要行驶的跑道2000
″
上。在到达跑道2000
″
时,履带总成1200b绕它们的倾斜轴na从倾斜行驶位置倾斜到水平行驶位置。履带总成1200b在过渡元件4120
′
,4220
′
上行驶,过渡元件4120
′
,4220
′
将运行轨道4110
′
,4210
′
与跑道2000
″
连接。在这种情况下,过渡元件4120
′
,4220
′
具有弧形外形,并且与运行轨道4110
′
,4210
′
类似,也包括具有凸起和凹陷的结构,为清晰起见未示出。当在过渡元件4120
′
,4220
′
上行驶时,驱动履带1210b的结构1211b与过渡元件4120
′
,4220
′
的结构接合,这防止驱动履带1210b在过渡元件4120
′
,4220
′
上行驶时打滑,并确保履带式车辆1000b从运动轨道装置4000安全退出。
92.在退出运行轨道装置4000之后,履带式车辆1000b立即处于如图6c所示的位置。履带总成处于水平运行位置和伸展位置,并且负载组件1100b被接收在运行轨道4110
″
,4210
″
之间。为了完全离开运行轨道装置4000,因此,履带式车辆1000b必须在跑道2000
″
上移动一定距离,并且在图6c的右侧示出的后两个履带总成1200b必须在跑道2000
″
上横向通过通道开口4130
″
。应注意,由于开口2100
′
,2100
″
,2100
″′
,履带总成1200b在离开上层跑道2000
′
,2000
″
,2000
″′
之一上的运行轨道装置4000时,必须处于伸展位置,以防止履带式车辆1000b落入相应的开口2100
′
,2100
″
,2100
″′
。此外,履带总成1200b必须穿过开口2100
″
的区域2110
″
,区域2110
″
临近过渡元件4120
′
。为了防止后两个履带总成1200b在该穿越过程中,无意地从跑道2000
″
上掉下来,在跑道2000
″
上设置有凸起2111
″
,这在水平方向上减少了开口2100
″
区域2110
″
的宽度。因此,凸起2111
″
确保驱动履带1210b在穿过开口2100
″
的区域2110
″
时,始终与跑道2000
″
接触,从而使履带式车辆1000b能够完全离开运行轨道装置4000。
93.上面考虑的情况是,跑道2000,2000
′
,2000
″
,2000
″′
与倾斜运行模块4100,4200,4100
′
,4200
′
,4100
″
,4200
″
相连。根据本发明的运行轨道装置5000的另一实施例在图7中示出。图7示出了根据本发明的履带式车辆1000c的示意性立体图,履带式车辆1000c具有四个履带总成1200c和根据本发明的运行轨道装置5000,运行轨道装置5000将带有垂直运行模块5100,5100
′
,5100
″
的几个跑道2000,2000
′
,2000
″
,2000
″″
连接起来。履带式车辆1000c类似于履带式车辆1000b,但具有额外的夹紧装置,下面将详细描述。下面省略履带式车辆1000c的类似元件的详细描述。
94.每个垂直运行模块5100,5100
′
,5100
″
包括彼此平行布置的第一对运行轨道5110,5110
′
,5110
″
和第二对运行轨道5210,5210
′
,5210
″
。第一对运行轨道5110,5110
′
,5110
″
和第二对运行轨道5210,5210
′
,5210
″
附接到周围的支撑结构t上,并在跑道2000,2000
′
,2000
″
,2000
″′
之间垂直运行。周围的支撑结构t的示例可以是建筑物或储存系统。上层跑道2000
′
,2000
″
,2000
″′
包括开口2100
′
,2100
″
,2100
″′
,开口2100
′
,2100
″
,2100
″′
的尺寸使得履带式车辆1000c在垂直运行模块5100,5100
′
,5100
″
上行驶时移动穿过它,不与上层跑道2000
′
,2000
″
,2000
″′
相撞。与图4所示的运行轨道装置4000的实施例类似,第一对运行轨道5110,5110
′
,5110
″
的轨道间和第二对运行轨道5210,5210
′
,5210
″
的轨道间水平隔开一定距离,该距离与履带总成1200c处于伸展位置在车辆宽度方向上的距离相一致。第一对运行轨道5110,5110
′
,5110
″
也与第二对运行轨道5210,5210
′
,5210
″
间隔开一定距离,该距离与履带总成1200c处于直线运行位置在车辆纵向方向上的倾斜轴na的距离相一致。换言之,为了在运行轨道装置5000上行驶,给履带式车辆1000c的每个履带总成1200c分配运行轨道。
每个运行轨道包括在一个表面上具有凸起和凹陷的结构5111,5211,5111
′
,5211
′
,5111
″
,5211
″
。在运行轨道5110,5110
′
,5110
″
的上端区域附近设置过渡元件5120,5120
′
,5120
″
,过渡元件5120,5120
′
,5120
″
也具有带有凸起和凹陷的结构,为了清晰起见未示出。然而,与图4中所示的运行轨道装置4000相比,过渡元件5120,5120
′
,5120
″
与运行轨道5110,5110
′
,5110
″
不是整体形成的。相反,过渡元件5120,5120
′
,5120
″
放置在相应的跑道2000
′
,2000
″
,2000
″′
上,使得它们的结构与运行轨道5110,5110
′
,5110
″
对面的结构相应。在垂直布置的行驶组件5100,5200,5100
′
,5200
′
,5100
″
,5200
″
之间,还设置有通道开口5130
′
,5130
″
,5130
″′
。通道开口5130,5230也分别设置在下层跑道2000和第一对运行轨道5110以及第二对运行轨道5210之间。
95.特别地,本实施例中所示的运行轨道装置5000设计成由具有四个履带总成1200c的履带式车辆1000c穿过。接下来,参照图8a至图8f,描述履带式车辆1000c在运行轨道装置5000上行驶时的各种位置和运动顺序。如图7的右下区域所示,履带式车辆1000c首先在下层跑道2000上运行,并在履带总成1200c处于水平行驶位置时接近运行轨道装置5000。履带式车辆1000c进入两个运行轨道5110,5120之间的运行轨道装置5000,并将履带总成1200c从回缩位置移动到伸展位置。负载组件1100c处于运行轨道5110,5210之间的该位置,并且履带总成1200c放置,使它们分别位于分配给它们的运行轨道5110,5120的下方。
96.在该位置,履带总成1200c绕它们的倾斜轴na倾斜。图8a示出了在履带总成1200c绕相应的倾斜轴na从水平运行位置倾斜到垂直运行位置时,图7的履带式车辆1000c的示意性侧视图。在垂直行驶位置,履带总成1200c绕它们的倾斜轴na相对于水平行驶位置倾斜90
°
,并分别在后端部1202c站立在下层跑道2000上。一旦履带总成1200c倾斜到垂直运行位置,整个负载组件1100c就升起而不会无意地倾斜。履带总成1200c与运行轨道5110,5210平行对齐,并且运行轨道5110,5210位于履带总成1200c之间,履带总成1200c在履带式车辆1000c的纵向方向上一个接一个地布置。
97.然而,为了使履带式车辆1000c沿运行轨道装置5000垂直行驶,履带总成1200c必须与运行轨道5110,5210接合,如图8b所示。图8b类似于图8a,示出了当履带总成1200c的驱动履带1210c与相应的运行轨道5110,5210的结构5111,5211接合时,履带式车辆1000c的示意性侧视图。处于竖直运行位置的履带总成1200c,沿着它们的夹紧轴ka在轨道5110,5210的方向上移动,由此在驱动履带1210c的结构1211c和运行轨道5110,5210的结构5111,5211之间产生形状配合和力配合接合。例如,如图8b所示,两个前履带总成1200c(如图8b左侧所示)借助于夹紧执行器1250c在运行轨道5110的方向上移动是足够的,因为这也导致后两个履带总成1200c向运行轨道5210移动。由于履带总成1200c的移动,在一方面,在履带总成1200c和运行轨道5110,5210之间存在夹紧力,并在另一方面,在相应的驱动履带1210c的结构1211c和运行轨道5110,5210的结构5111,5211之间存在形状配合接合。从该位置,可以开始沿着运行轨道装置5000的安全垂直运行,并且负载组件1100c可以安全地在跑道2000,2000
′
,2000
″
,2000
″′
之间以非倾斜的方向垂直移动,防止驱动履带1210c从运行轨道5110,5210上滑脱。
98.例如,为了使履带式车辆1000c能够从下层跑道2000行驶到第二上层跑道2000
″
,它必须在垂直行驶期间越过第一上层跑道2000
′
,如图8c所示。图8c类似于图8b,示出了在垂直行驶过程中,当越过一个设置在另一个上方的两组垂直运行模块5100,5100
′
之间的通
道开口5130
′
,5230
′
时,履带式车辆的示意性侧视图。如上所述,履带式车辆1000c在垂直行驶期间沿运行轨道5110,5210运行,驱动履带1210c的结构1211c与运行行驶轨道5110,5210的结构5111,5211接合。然而,在到达第一上层跑道2000
′
时,履带式车辆1000c并未结束垂直行进,而是越过垂直运行模块5100,5100
′
和垂直运行模块5200,5200
′
之间的通道开口5130
′
,5230
′
。如图8c所示,通道开口5130
′
,5230
′
的尺寸使得每个驱动履带1210c在越过通道开口5130
′
,5230
′
时,始终与至少一个运行轨道5110,5210,5110
′
,5210
′
接触。因此,每个驱动履带1210c的结构1211c与相应运行轨道5110,5210,5110
′
,5210
′
的相应结构5111,5211,5111
′
,5211
′
之间的夹紧力以及由此的接合可以始终保持。在越过通道开口5130
′
,5230
′
之后,履带式车辆1000c然后可以沿运行轨道5110
′
,5210
′
继续垂直行进,并继续向要到达的跑道方向行进。
99.当履带式车辆1000c已经到达指定的跑道2000
″
时,结束沿着运行轨道装置5000的垂直行驶并在跑道2000
″
上开始行进,如图8d至8f所示。图8d类似于图8c,示出了当车辆宽度方向上彼此相邻布置的两个履带总成1200c绕相应的倾斜轴na从垂直运行位置倾斜至水平运行位置时,履带式车辆1000c的示意性侧视图。
100.为了开始从运行轨道装置5000退出到上层跑道2000
″
,履带式车辆1000c首先越过通道开口5130
″
,5230
″
,直到履带总成1200c的后端区域1202c与上层跑道2000
″
处于同一水平。在该位置,履带式车辆1000c不再向上行驶,并且履带总成1200c与运行轨道5110
″
,5210
″
接合。随后,如图8d右侧所示的后两个履带总成1200c绕它们的倾斜轴na从垂直运行位置倾斜至水平运行位置,同时履带式车辆1000c向下朝上层跑道2000
″
移动。首先,后两个履带总成1200c的后端部1202c与上层跑道2000
″
保持接触,同时与运行轨道5210
″
保持接触,如图8d所示。然而,随着后履带总成1200c进一步倾斜到水平运行位置,放开前端区域1201c与运行轨道5210
″
的接触,并且后履带总成1200c仅与上层跑道2000
′
接触。如图8d左侧所示,在后履带总成1200c倾斜期间,前履带总成1200c保持夹紧力并与运行轨道5110
′
,5110
″
接合。这可以确保履带式车辆1000c的履带总成1200c始终与运行轨道5110
′
,5110
″
,5210
″
或上层跑道2000
″
接触,并且可以防止履带式车辆1000c在这一离开运行轨道装置5000的子步骤期间发生碰撞。
101.然后,前两个履带总成1200c在过渡元件5120
′
上行驶,如图8e所示。图8e类似于图8d,示出了当通过其夹紧执行器1250c沿相应运行轨道5110
′
的结构5111
′
和相应过渡元件5120
′
的结构之间的夹紧轴ka移动至少一个履带总成时,履带式车辆1000c的示意性侧视图。过渡元件5120
′
倾斜布置在上层跑道2000
″
上并靠近运行轨道5110
′
的上端区域,过渡元件5120
′
的结构面对着对应的运行轨道5110
′
的结构5111
′
。为了越过过渡元件5120
′
,前履带总成1200c绕它们的倾斜轴na倾斜,使得它们与倾斜的过渡元件5120
′
平行对齐。此时,如图8e所示,履带式车辆水平向左移动。首先,保持前履带总成1200c的后端区域1202c与运行轨道5110
′
的结构5111
′
之间的接触以及由此的夹紧力。随后,两个前履带总成1200c中的其中一个沿其夹紧轴ka移动,使得与相应的行驶轨道5110
′
失去接触,并且履带总成1200c与对面的过渡元件5120
′
接触。然而,同时,保持另一个前履带总成1200c与运行轨道5110
′
之间的接触,以及后两个履带总成1200c与跑道2000
″
之间的接触。当其他三个履带总成1200c与过渡元件5120
′
或上层跑道2000
″
接触时,对另外的履带总成1200c重复这一过程。
102.在这种配置中,当后两个履带总成1200c已经在上层跑道2000
″
上时,前两个履带
总成1200c与过渡元件5120
′
接合。应注意,履带总成1200c在运行轨道5110
′
和过渡元件5120
′
之间移动之后,履带式车辆1000c进一步行驶,驱动履带1210c的旋转方向必须反转,以避免驱动履带1210c卡住。如图8e右侧所示,后履带总成1200c横穿开口2100
″
的部分2110
″
,开口2100
″
的部分2110
″
与第二对运行轨道5210
′
的上端部相邻。区域2110
″
的尺寸使得当履带总成1200c退出运行轨道装置5000时,它们可以被处于伸展位置的履带总成1200c越过,因此履带式车辆1000c不会从跑道2000
″
上落下。
103.为了完全退出运行轨道装置5000,前两个履带总成1200c绕它们的倾斜轴na倾斜至图8f所示的水平运行位置。图8f类似于图8e,示出了当退出运行轨道装置5000并在上层跑道2000
″
上行驶时,履带式车辆1000c的示意性侧视图。因此,在图8f所示的情境下,履带式车辆1000c的所有履带总成1200c再次在上层跑道2000
″
上处于水平运行位置。因此,履带式车辆1000c可以在上层跑道2000
″
上开始水平行驶。
104.在上述实施例中,详细描述了根据本发明的运行轨道装置3000,4000,5000以及用根据本发明的履带式车辆1000a,1000b,1000c在它们上行驶。下面参考图9a至9c描述根据本发明的履带式车辆1000在跑道2000上的进一步的运行自由度。图9a示出了与图1a对应的处于回缩位置和非倾斜位置的履带总成1200的示意性立体图。在该位置,可以驱动履带总成1200的驱动履带1210并向前推进履带式车辆。为了改变履带式车辆1000的运行方向,可以以不同的旋转方向和/或旋转速度驱动履带总成1200的驱动履带1210,例如类似于雪地车。
105.另一方面,整个履带总成1200可以围绕它们的转向轴la转动,如图9b所示。图9b示出了图9a中的履带总成1200在绕其转向轴la旋转和绕其倾斜轴na倾斜的组合过程中的示意性立体图。履带总成1200绕转向轴la的旋转导致履带总成1200的前束角发生变化。履带总成1200绕其倾斜轴na的倾斜也导致接触表面a
′
的移动,这是由于履带总成1200的细长外形比非倾斜位置的接触表面a小。在图9b中,履带总成1200由此倾斜,使得接触表面a
′
向履带总成1200的前端区域1201移动,其中倾斜轴na和转向轴la穿过履带总成1200。因此,在该位置,转向轴la也穿过接触表面a
′
。当履带总成1200绕转向轴la旋转时,可以防止整个履带式车辆1000像陀螺一样旋转。
106.履带总成1200可以绕转向轴la旋转任意角度,例如90
°
。图9c示出了图9a中的履带总成处于横向运行位置在绕其转向轴la旋转和绕其倾斜轴na倾斜组合之后的示意性立体图。在横向运行位置,履带式车辆的履带总成1200绕它们的转向轴大体上旋转了90
°
。此外,履带总成1200是倾斜的,使得立足表面a
′
位于履带总成1200的前端区域1201,并被转向轴la穿过。当履带式车辆1000的所有履带总成1200移动到这种位置时,履带式车辆1000横向于图9a所示的行驶方向运行。
107.因此,履带式车辆1000可以通过绕转向轴la旋转履带总成1200,来改变其在跑道2000内的运行方向,最好,与围绕倾斜轴na倾斜组合。例如,因此,使履带式车辆1000的横向行驶成为可能,其中在横向行驶期间的运行方向相对于图9a所示的运行方向旋转90
°
。由于当履带总成1200绕转向轴la旋转时负载组件1100不移动,所以履带式车辆1000的改变方向所需的空间很小,即使在可用空间很小的跑道上,也能保证履带式车辆的敏捷性。
108.在上述优选实施例的描述中,考虑了履带式车辆1000,1000a,1000b,1000c包括带有圆形端部区域的细长外形的履带总成1200,1200a,1200b,1200c的情况。然而,履带总成
也可以具有其他外形,例如基本上呈正方形、梯形或椭圆形。
109.以上假定驱动履带1210,1210a,1210b,1210c是由大量循环链节形成的。然而,也可以想到,驱动履带由循环且一体式的皮带组成,皮带在它们的外表面上具有凸起和凹陷的结构。
110.在参考图8b对垂直行驶的上述说明中,考虑了履带总成相对于彼此移动以产生夹紧力的情况,即在履带式车辆的中心方向上,并且在垂直行驶过程中,在车辆纵向方向上,运行轨道位于履带总成之间。然而,也有可能的是,在垂直行驶过程中,履带总成位于车辆纵向方向上的运行轨道之间,并且履带总成彼此移动远离,以在运行轨道和履带总成之间产生张力。然后张力代替夹紧力,并确保驱动履带的结构和运行轨道的结构之间的接合。在这种配置中,当到达要行驶的跑道时,前履带总成不会沿它们在运行轨道和过渡元件之间的夹紧轴移动,因此前驱动履带的旋转方向也不会反转,如图8a至8f的左侧所示。相反,旋转方向的转换以及反转发生在后驱动履带上,如图8a至8f的右侧所示。
111.在参考图8a至8f对垂直行驶的上述说明中,也描述了过渡元件设置在第一对运行轨道或前两个运行轨道的上端区域附近的情况。然而,过渡元件也可以设置在第二对运行轨道,即两个后运行轨道的上端区域附近。
112.在上述倾斜和垂直行驶的实施例中,驱动履带和运行轨道之间的接合基本上是形状配合,在垂直行驶的情况下,加上力配合。然而,根据本发明,驱动履带和运行轨道之间的接合也可以完全是力配合类型,例如在de202020100256u1中就是这种情况。尤其是线性马达,在驱动履带和运行轨道之间存在磁吸力。
113.应注意,除了上述元件之外,根据本发明的履带式车辆可以包括一个或多个电子控制单元,该电子控制单元特别设计成控制驱动履带、倾斜装置、移动装置、转向装置和夹紧装置。电子控制单元既可以物理地设置在履带式车辆上,也可以通过无线连接连接到履带式车辆,从而远程控制履带式车辆。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1