用于机动车的车顶、具有车顶的机动车、用于车顶的组件和用于装配车顶的方法与流程
1.本发明涉及一种包括权利要求1的前序部分的特征的、用于机动车、特别是用于乘用车的车顶、一种具有车顶的机动车、一种用于机动车的车顶的组件以及一种用于装配机动车的车顶的方法。
背景技术:
2.前述类型的车顶由实践公知并且尤其是乘用车的车顶的组成部分并且构造为车顶模块。车顶模块是单独的元件,所述元件为了构成车顶能够安置在车顶侧梁上,所述车顶侧梁是形成白车身结构的车身的组成部分。车顶模块通常具有承载结构,其作为与车顶侧梁的接口并且作为给车顶模块赋予刚性的元件,所述承载结构可以由车顶框架构成。承载结构由车顶覆层遮盖,所述车顶覆层构成车顶模块的外部可见表面。车顶模块可以构造为纯固定车顶元件,所述车顶模块在全景车顶的情况中具有透明的车顶区段,所述透明的车顶区段形成车顶透视区域。为了构成车顶透视区域,车顶覆层在相关的区段中透明地实施。替换地,车顶模块可以具有车顶打开系统,所述车顶打开系统包括能调节的盖元件,借助于所述盖元件能够可选地打开或关闭车顶开口。在具有车顶打开系统的车顶模块的情况中,车顶覆层延伸直到车顶开口处。
3.此外公知的是,在设置有顶盖的车顶上布置传感器模块,以实现相关机动车的自动驾驶或半自动驾驶。所述传感器模块可以包括环境传感器,借助于所述环境传感器可以监测和检测车辆周围环境。
4.在自动的或半自动的驾驶模式中可以借助于相应的控制装置基于监测信号或检测信号来控制机动车。以往使用在自动或半自动驾驶的机动车中的传感器模块安置到机动车的车顶覆层上。传感器模块由此形成相关的车辆的最高的凸出部。然而构造为附件的传感器模块导致不满足流行的顾客要求的外观。
5.需要的是,环境传感器或传感器模块非常准确地相对于白车身结构定位,由此借助传感器模块能够明确地并且精确地测量车辆周围环境。此外,环境传感器的视野不应被限制。也就是说,存在非常高的公差要求。然而确定系列的不同车辆的承载结构的尺寸和几何结构可能彼此不同。
技术实现要素:
6.本发明的任务在于,提供一种开头所述类型的车顶,其中,传感器模块相对于承载结构准确地定位。此外,本发明的任务在于,提供一种具有所述车顶的机动车、一种用于所述车顶的组件和一种用于装配所述车顶的方法。
7.所述任务通过具有权利要求1的特征的车顶、具有权利要求8的特征的机动车、具有权利要求9的特征的组件以及具有权利要求12的特征的方法来解决。
8.也就是说,根据本发明提出一种车顶,其中,传感器模块固定在承载结构上,所述
承载结构由车顶覆层遮盖,其中,在承载结构和传感器模块之间布置公差补偿元件,所述公差补偿元件限定承载结构和传感器模块之间的相对位置。公差补偿元件准确地具有下述几何结构,所述几何结构需要实现在承载结构和传感器之间位置准确的布置并且遵守传感器模块和白车身结构之间允许的公差,承载结构与所述几何结构连接。公差补偿元件是精确地预制的中间元件,所述中间元件作为插入件被置入到承载结构和传感器模块之间,并且所述中间元件实现在三个空间方向上遵守小的公差,所述公差必须在环境传感器关于其相对于白车身结构的位置的情况中被遵守,并且所述公差可以为十分之几毫米和仅仅几度或十分之几度。
9.在根据本发明的车顶的一个优选的实施方式中,公差补偿元件是公差补偿板,传感器模块安置在所述公差补偿板上。
10.公差补偿元件可以具有孔或不同构造的固定点,所述孔或不同构造的固定点允许固定在传感器模块和/或承载结构上。传感器模块在装配状态中安置在公差补偿板上。
11.在根据本发明的车顶模块的一个特定的实施方式中,为了也可以限定传感器模块和承载结构之间的角度位置,公差补偿元件具有楔形的或梯形的横截面。公差补偿元件的楔形的或梯形的构型特别是也可以这样被选择,以使得传感器模块相对于承载结构的角度调设在关于相关机动车的定向的两个空间方向上进行。替换地,然而公差补偿元件也可以是简单的必要时在其尖端侧被切割的具有矩形的基面的楔,所述楔的角度仅仅在关于车辆定向的一个空间方向上张开。
12.根据本发明的车顶的承载结构例如是车顶框架或车顶框架的部分或者与车顶框架连接,所述车顶框架在车顶装配在车辆上的状态中优选地形成与白车身结构的接口,所述接口可以特别是由车顶梁、例如车顶侧梁构成。车顶框架可以环绕地构造或者也仅仅包括单个的框架区段。承载结构也可以是附加的元件,所述附加的元件与框架或相关的框架区段连接。
13.在根据本发明的车顶的一个满足高设计要求的实施方式中,车顶覆层遮盖传感器模块。传感器模块由此以紧凑的方式由车顶模块接收。
14.符合目的地,遮盖传感器模块的车顶覆层设置有传感器透视区域,环境传感器经过所述传感器透视区域能够检测车辆周围环境,并且所述传感器透视区域可以构造为缺口或玻璃制品。
15.根据本发明的车顶的环境传感器能够以多种多样的方式设计,使用电磁辐射和/或声波并且例如包括lidar传感器、雷达传感器、光学传感器、例如摄像机、天线装置和/或诸如此类。当环境传感器是lidar传感器时,该传感器优选地在大约905nm或者也大约1550nm的波长范围内工作。用作环境传感器的摄像机可以在可见光波的长范围内和/或在红外线范围内工作。构造在车顶覆层上的传感器透视区域尤其对于由环境传感器所使用的波长并且优选地对于200nm和2000nm之间的波长范围是透明的。也符合目的地实现传感器透视区域对于雷达辐射的透明性。
16.通过本发明特别是提供车顶传感器模块或roof sensor module(rsm),其实现相关车辆的自动驾驶或半自动驾驶。
17.车辆配备有根据本发明的车顶模块并且构造为自动驾驶车辆,所述车辆在自动驾驶模式中独立地至少在无驾驶员的主要干预的情况下驾驶。在机动车的半自动的驾驶模式
中,根据本发明的车顶例如构成驾驶辅助系统的一部分。
18.根据本发明的车顶特别是包括车顶模块,下述部件以集成方式被接收到车顶模块中,该部件需要用于相关车辆的自动驾驶或半自动驾驶。可具有多个功能元件的车顶构成紧凑的结构单元,所述结构单元可以在车辆制造商侧为了构成车顶而与车身或白车身结构连接,所述白车身结构符合目的地包括车顶梁、例如侧梁,车顶模块被接收在所述车顶梁之间。
19.根据本发明的车顶可以设置有连续地固定的车顶覆层或者也设置有车顶打开系统,所述车顶打开系统以盖元件可选地打开或封闭车顶覆层的车顶开口。此外,车顶覆层可以构成车顶透视区域,所述车顶透明区域是透明的固定车顶区段。根据本发明的车顶尤其是乘用车的组成部分,然而也可以使用在商用车中,所述商用车例如构造为送货车、自动驾驶的小型公共汽车、例如所谓的people mover(大众运输工具)、公共汽车或者也构造为载重拖拉机。
20.本发明的主题也是一种机动车,所述机动车包括前述类型的车顶。机动车原则上可以是任意的道路交通工具、轨道交通工具或水上交通工具,然而优选地是乘用车或商用车。
21.此外,本发明的主题是一种用于机动车、特别是乘用车的车顶的组件,其包括:承载结构和至少一个传感器模块,所述传感器模块具有至少一个环境传感器,所述环境传感器能够固定在承载结构上;以及多个公差补偿元件,所述公差补偿元件具有不同的尺寸并且能够分别在将传感器模块固定在承载结构上时布置在传感器模块和承载结构之间。也就是说,所述组件包含一组公差补偿元件,在装配或组装车顶时根据承载结构和/或传感器模块的确定的几何结构从这组公差补偿元件中选择至少一个公差补偿元件,并且将该公差补偿元件布置在传感器模块和承载结构之间。
22.关于公差补偿元件选择的至少一个公差补偿元件符合目的地具有楔形的或梯形的横截面,从而能实现传感器模块和承载结构之间的角度调设。
23.优选地,所述公差补偿元件中的多个公差补偿元件具有楔形的和/或梯形的横截面,其中,这些公差补偿元件的楔角不同,和/或这些公差补偿元件具有不同的梯形角和/或不同的梯形高度。
24.此外,公差补偿元件可以具有不同的厚度和/或也构造为具有平行的表面的垫板。
25.此外,本发明的主题是一种用于装配机动车、特别是乘用车的车顶的方法,其包括以下步骤:
[0026]-提供承载结构;
[0027]-提供具有至少一个环境传感器的至少一个传感器模块;
[0028]-测量承载结构和/或测量传感器模块以确定承载结构的尺寸和/或传感器模块的尺寸;
[0029]-根据承载结构的尺寸和/或传感器模块的尺寸从具有不同的尺寸的多个公差补偿元件中选择公差补偿元件;和
[0030]-将传感器模块固定在承载结构上,其中,将所选择的公差补偿元件布置在承载结构和传感器模块之间。
[0031]
通过测量承载结构和/或传感器模块可以确定传感器模块和白车身结构之间的相
对位置,所述相对位置在不使用公差补偿元件的情况下存在,并且所述相对位置可以借助于公差补偿元件被修正。公差补偿元件与传感器模块一起固定在承载结构上。
[0032]
优选地提供车顶框架作为承载结构,所述车顶框架可以特别是已经设置有车顶覆层。在车顶覆层中可以构造开口,传感器模块可以通过所述开口被固定在承载结构上。
附图说明
[0033]
本发明的主题的另外的优点和有利的构型能够由说明书、附图和权利要求获知。
[0034]
本发明的主题的一个实施例在附图中示意性地简化地被示出并且在下述说明中具体地被阐述。附图中:
[0035]
图1示出具有车顶模块的车顶的示意性的俯视图;
[0036]
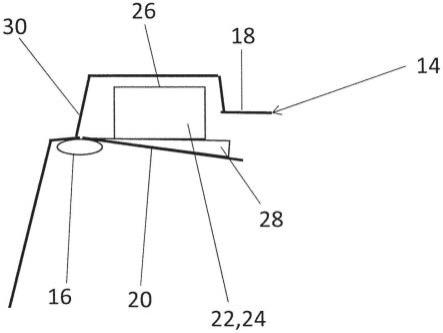
图2示出沿着图1中的直线ii-ii剖割根据图1的车顶的截面图;和
[0037]
图3a至d分别示出带有不同的公差补偿元件的、在车顶模块的承载结构上的传感器模块。
具体实施方式
[0038]
在图1中示出机动车10,所述机动车构造为乘用车并且具有车顶12,所述车顶覆盖车辆内室。车顶12包括车顶模块14,所述车顶模块布置在车顶侧梁16之间,所述车顶侧梁关于竖直的车顶纵向中心平面布置在两侧并且构成车顶12的侧边缘。车顶侧梁14是作为白车身结构的车身的组成部分。
[0039]
如同由图1和2的概览得知的那样,车顶模块14包括车顶覆层18和框架式的承载结构20,所述承载结构是车顶下部构型并且形成车顶模块14与车顶侧梁16的接口。
[0040]
车顶模块14构造为传感器车顶模块或roof sensor module(rsm),所述传感器车顶模块配备有下述装置,该装置实现机动车10的自动驾驶。车顶模块14为此具有传感器,所述传感器在车顶的四个角部区域中分别包括传感器模块22,所述传感器模块配备有环境传感器24,为了实现自动驾驶,借助于所述环境传感器可以检测车辆周围环境。环境传感器24分别布置在壳体26上或中,所述壳体通过在横截面上楔形的公差补偿元件28布置在承载结构20上。根据公差补偿板的类型构造的公差补偿元件28是精确地预制的元件,该元件确保将传感器模块22相对于承载结构20并且由此相对于车顶侧梁16准确地定位。
[0041]
车顶覆层18不仅遮盖承载结构20而且遮盖传感器模块22。在传感器模块22的区域中在车顶覆层18上分别构造侧壁30,所述侧壁构成用于相应的传感器模块22的环境传感器24的传感器透视区域。
[0042]
传感器模块22的环境传感器24能够以多种多样的方式构造并且例如包括lidar传感器、雷达传感器、摄像机和/或其他适合的传感器。车顶覆层18的可分别构造为车顶覆层嵌入件的侧壁30对于由环境传感器24所使用的波长是透明的。侧壁30尤其对于200nm和2000nm之间的波长并且也对于雷达辐射是透明的。
[0043]
环境传感器24与机动车10的未具体示出的控制装置连接。通过借助于控制装置评估和分析环境传感器24的测量信号能够确定相应的交通情况,从而机动车10可以自动地或自主地与相应的交通情况相适应并且相应地行动。
[0044]
在制造车顶模块14时需要的是,传感器模块22准确地相对于机动车10的外壳结构
定位。如同前面已实施的那样,车顶模块14的承载结构20构成与外壳结构的接口。然而承载结构20和传感器模块22的尺寸和几何结构可以不总是相应于预定值。因此,在制造车顶模块14时测量承载结构20的几何结构,从而确定所述承载结构的尺寸和几何结构。相应地也可以测量传感器模块22或传感器模块22的壳体26的几何结构,从而也已知其尺寸和几何结构。现在根据所确定的尺寸和几何结构从预先提供的关于几何结构(厚度、楔角、梯形等)不同的多个补偿元件,中选择一个确定的公差补偿元件28,并且将该公差补偿元件用作中间元件或间隔件,通过该公差补偿元件将相应的传感器模块22装配或固定在承载结构20上。通过公差补偿元件28将传感器模块28关于位置和/或角度位置精确地固定。
[0045]
也就是说,用于制造车顶模块14的组件至少包括承载结构20、四个传感器模块22和多个公差补偿元件,所述多个公差补偿元件具有不同的结构并且可以分别在将相关的传感器模块22固定在承载结构20上时布置在该传感器模块22和承载结构20之间。
[0046]
由图3a至3d可看到承载结构20a,20b,20c和20d,所述承载结构关于其相对于车顶侧梁16的倾斜度是不同的。为了尽管如此可以为要定位在相关的承载结构20a,20b,20c或20d上的传感器模块22实现相对于车顶侧梁16精确的相对位置,将相应的楔形的公差补偿元件28a,28b,28c或28d插入在传感器模块22和承载结构20a,20b,20c或20d之间。公差补偿元件28a关于楔角不同于公差补偿元件28c。公差补偿元件28b关于所形成的楔的渐缩方向不同于公差补偿元件28a和28c。公差补偿元件28d具有梯形的横截面。
[0047]
附图标记列表
[0048]
10机动车
[0049]
12车顶
[0050]
14车顶模块
[0051]
16车顶测量
[0052]
18车顶覆层
[0053]
20承载结构
[0054]
22传感器模块
[0055]
24环境传感器
[0056]
26壳体
[0057]
28公差补偿元件
[0058]
30侧壁。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1