智能车辆自动变道侧向控制系统和控制方法
1.本发明涉及自动驾驶技术领域,尤其涉及一种智能车辆自动变道侧向控制系统和控制方法。
背景技术:
2.自动驾驶是实现智能汽车、智能交通和智能车联网的关键技术。随着传统汽车工业的发展逐渐趋于饱和,自动驾驶将是未来汽车发展的必然趋势。车辆运动控制分为纵向运动控制和横向运动控制。纵向运动控制是指通过控制车辆油门和制动器对车速进行精确的后续控制;横向运动控制是通过控制车辆的前轮角度来跟踪所需的轨迹,这是智能车辆运动控制的核心研究问题之一。
3.横向运动控制需要基于变道场景,变道场景中涉及需要解决的重点和难点问题较多,变道场景需要考虑车辆的周边环境因素,以及车辆在变道过程中的操控稳定性和平稳性。同时,变道场景中的轨迹跟踪是一个非线性约束问题,对变道轨迹规划和轨迹跟踪的要求更高。尤其是当路面状况很差,车轮出现打滑等状况时,如果不能根据实时状况快速灵活且稳定地控制转向角度将会引发交通事故。在汽车的实际驾驶过程中,路况复杂。转向系统的子系统,如轮胎,悬架和eps具有不同程度的凝聚力。同时,每个子系统都有自己的非线性特性。水平控制很难获得更好的适应性。而且伺服驱动电机在做出转向切换动作时会出现延迟。无法保证转角的精确控制。
4.另外,自动驾驶过程中完全电力驱动控制器和电机运行,如果行驶中突然出现主电源损坏失去电力、主线路断路、或主转向电机控制器突然损坏时,如果没有备用方案,将导致交通事故。
技术实现要素:
5.有鉴于此,本发明的目的之一是提供一种智能车辆自动变道侧向控制系统,通过该智能车辆自动变道侧向控制系统可提高转向时的稳定性和控制精度。
6.本发明通过以下技术手段解决上述技术问题:
7.本发明的智能车辆自动变道侧向控制系统和控制方法,包括主伺服驱动电机、主转向电机控制器、第一减速器、角位移传感器、转向系统和传动部件,所述转向系统包括转向盘、转向轴和转向器,所述转向器包括转向摇臂,所述转向器用于将转向盘的转动变为转向摇臂的摆动,还包括横向控制器,所述横向控制器包括毫米波激光雷达和摄像头,所述毫米波激光雷达设置有多个,可分别设置在车体四周,所述摄像头设置在车头前方且朝向前方地面拍摄,所述角位移传感器、毫米波激光雷达和摄像头分别与主转向电机控制器电路连接,所述主转向电机控制器与主伺服驱动电机电路连接,所述主伺服驱动电机通过第一减速器与转向轴传动连接,所述角位移传感器安装在转向轴上用于测量转向轴转动的角度。
8.进一步,还包括第二减速器、副伺服驱动电机和副转向电机控制器,所述副转向电
机控制器与副伺服驱动电机电路连接,所述副转向电机控制器分别与毫米波激光雷达和摄像头连接,所述副伺服驱动电机通过第二减速器与转向轴传动连接。
9.进一步,还包括供电系统,所述供电系统包括ups逆变器、主电瓶、备用电瓶和电源控制器,所述电源控制器分别与ups逆变器、主电瓶和主转向电机控制器电路连接;所述ups逆变器还分别与备用电瓶和副转向电机控制器电路连接。
10.进一步,所述电源控制器与ups逆变器之间通过线路连接,还包括转向灯开关总成,所述转向灯开关总成串联在所述线路上,转向灯开关总成分别与副转向电机控制器和主转向电机控制器信号连接。
11.进一步,还包括电磁离合器,所述电磁离合器设置在副伺服驱动电机与第二减速器的动力出入轴之间,所述电磁离合器与转向灯开关总成连接,当转向灯开关总成控制转向灯闪烁时,所述电磁离合器闭合使副伺服驱动电机与第二减速器之间连接传递动力。
12.本发明的目的之二是提供一种智能车辆自动变道侧向控制系统的控制方法,通过该控制方法可提高转向时的稳定性和控制精度。
13.本发明通过以下技术手段解决上述技术问题:
14.本发明智能车辆自动变道侧向控制系统的控制方法,采用以下步骤:
15.s1)当转向时,转向灯开关控制转向灯打开的同时,电磁离合器闭合,同时使电源控制器与ups逆变器之间线路断开;
16.s2)当电源控制器与ups逆变器之间线路断开后,ups逆变器连通备用电瓶与副转向电机控制器之间的线路;
17.s3)由副转向电机控制器和主转向电机控制器分别控制副伺服驱动电机和主伺服驱动电机同时驱动转向轴转动,从而提高转向时对转向轴的控制强度和稳定性;
18.s4)副转向电机控制器和副伺服驱动电机主要用于纠偏,其工作方法是:当主转向电机控制器控制主伺服驱动电机进行转向时,副伺服驱动电机停止转动等待指令,如果车轮出现打滑或转角过大,则主伺服驱动电机停止继续驱动转向轴向同一个方向转向,此时副转向电机控制器控制副伺服驱动电机驱动转向轴反向转动以纠正转向角度,从而消除主伺服驱动电机正反转切换时产生的延迟,实现对转向的精准控制。
19.本发明的目的之三是提供一种智能车辆自动变道侧向控制系统的控制方法,通过该控制方法可避免因主电源损坏失去电力、主线路断路、或主转向电机控制器突然损坏导致的交通事故。
20.本发明通过以下技术手段解决上述技术问题:
21.本发明智能车辆自动变道侧向控制系统的控制方法,采用以下步骤:
22.s1)当主电瓶突然失去电力时,电磁离合器闭合,使ups逆变器连通备用电瓶与副转向电机控制器之间的线路;
23.s2)由副转向电机控制器控制副伺服驱动电机工作来驱动转向轴转动,从而提高自动驾驶的安全性。
24.本发明的有益效果:
25.1)本发明的智能车辆自动变道侧向控制系统,其包含横向控制器,横向控制器通过毫米波激光雷达可以在1-10毫米的波段内发射电磁波,通过测量接收到的反射信号的频率变化,可以计算出汽车与其他物体之间的相对距离和方位角,还可以获得障碍物的相对
速度信息,另结合对摄像头拍摄的路面移动方向的分析可以检测出车辆转向时是否出现漂移等现象,进而可以及时调整转向角度以避免出现事故。
26.2)本发明的智能车辆自动变道侧向控制系统,通过设置第二减速器、副伺服驱动电机和副转向电机控制器可消除因主伺服驱动电机正反转切换时产生的延迟,实现对转向的精准控制和纠偏,提高动作灵敏度和相应速度。
27.3)本发明的智能车辆自动变道侧向控制系统控制方法,提高了转向时的稳定性和控制精度。另外,也避免了因主电源损坏失去电力、主线路断路、或主转向电机控制器突然损坏导致的交通事故。
附图说明
28.下面结合附图和实施例对本发明作进一步描述。
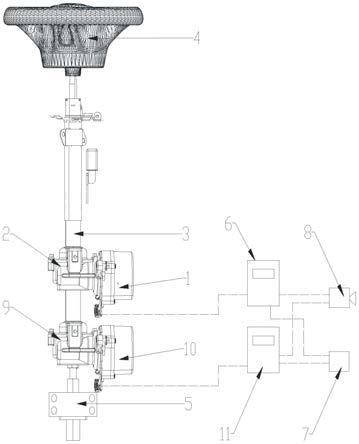
29.图1为本发明智能车辆自动变道侧向控制系统的结构示意图,图中部分线路连接以虚线表示;
30.图2为本发明智能车辆自动变道侧向控制系统的立体结构示意图;
31.图3为本发明智能车辆自动变道侧向控制系统的线路连接框图。
具体实施方式
32.以下将结合附图对本发明进行详细说明:
33.如图1至图3所示,本发明的智能车辆自动变道侧向控制系统,包括主伺服驱动电机1、主转向电机控制器6、第一减速器2、角位移传感器5、转向系统和传动部件,所述转向系统包括转向盘4、转向轴3和转向器,所述转向器包括转向摇臂,所述转向器用于将转向盘的转动变为转向摇臂的摆动,为了确定主伺服驱动电机1型号,必须计算转向系统的最大负载扭矩,理论计算方法是通过轮胎的压力、转向轴3的载荷和轮胎与地面之间的动态摩擦系数得到汽车的转向阻力矩,然后通过传动比计算施加在转向机构上的实际力。
34.还包括横向控制器,所述横向控制器包括毫米波激光雷达7和摄像头8,所述毫米波激光雷达设置有多个,可分别设置在车体四周,所述摄像头8设置在车头前方且朝向前方地面拍摄,所述角位移传感器、毫米波激光雷达和摄像头分别与主转向电机控制器电路连接,所述主转向电机控制器与主伺服驱动电机电路连接,所述主伺服驱动电机通过第一减速器与转向轴传动连接,所述角位移传感器安装在转向轴上用于测量转向轴转动的角度。还包括第二减速器9、副伺服驱动电机10和副转向电机控制器11,所述副转向电机控制器11与副伺服驱动电机10电路连接,所述副转向电机控制器11分别与毫米波激光雷达7和摄像头8连接,所述副伺服驱动电机通过第二减速器9与转向轴3传动连接。具体的,传感过程中使用的雷达是毫米波激光雷达,它可以在1-10毫米的波段内发射电磁波,通过测量接收到的反射信号的频率变化,可以计算出汽车与其他物体之间的相对距离和方位角,还可以获得障碍物的相对速度信息。一般来说,毫米波可以探测到100米外的物体。毫米波雷达具有很强的稳定性,可以在雨,雪,雾等恶劣条件下工作,其成本低,在汽车高级驾驶辅助系统中具有广泛的应用。自动驾驶时,横向控制器的设计可以提高转向角度的精确性,还可避免出现因转向导致的车轮打滑现象的出现。
35.作为上述技术方案的进一步改进,还包括供电系统,所述供电系统包括ups逆变
器、主电瓶、备用电瓶和电源控制器,所述电源控制器分别与ups逆变器、主电瓶和主转向电机控制器电路连接;所述ups逆变器还分别与备用电瓶和副转向电机控制器电路连接。ups逆变器的作用是当主电瓶断电时,ups逆变器可以自动将电路切换到与备用电瓶连接。设置备用电瓶可避免自动驾驶过程中因主电源损坏、主线路断路导致的交通事故。
36.作为上述技术方案的进一步改进,所述电源控制器与ups逆变器之间通过线路连接,还包括转向灯开关总成,所述转向灯开关总成与主转向电机控制器连接,所述转向灯开关总成串联在所述线路上,转向灯开关总成分别与副转向电机控制器和主转向电机控制器信号连接,转向灯开关总成优先地由主转向电机控制器控制。在转向之前,主转向电机控制器先控制转向灯开关总成打开转向灯,同时断开电源控制器与ups逆变器之间的线路,进而接通备用电瓶并启动副转向电机控制器11,即在不需要大角度转向时,副转向电机控制器11处于休眠状态。
37.作为上述技术方案的进一步改进,还包括电磁离合器,所述电磁离合器设置在副伺服驱动电机与第二减速器的动力出入轴之间,所述电磁离合器与转向灯开关总成连接,当转向灯开关总成控制转向灯闪烁时,所述电磁离合器闭合使副伺服驱动电机与第二减速器之间连接传递动力。通过设置电磁离合器,可断开转向轴3与副伺服驱动电机之间的传动,进而可降低转向轴3转动时的负载,不但可节省电能,还可以提高主伺服驱动电机的灵敏性。
38.本发明的智能车辆自动变道侧向控制系统具有两种控制方法,第一种是在主电瓶和供电线路正常的情况下,仍然由主转向电机控制器和主伺服驱动电机控制转向工作,具体地采用以下步骤:
39.s1)当转向时,主转向电机控制器控制转向灯开关打开转向灯,此时电磁离合器闭合,同时使电源控制器与ups逆变器之间线路断开;
40.s2)当电源控制器与ups逆变器之间线路断开后,ups逆变器连通备用电瓶与副转向电机控制器之间的线路;
41.s3)由副转向电机控制器和主转向电机控制器分别控制副伺服驱动电机和主伺服驱动电机同时驱动转向轴转动,从而提高转向时对转向轴的控制强度和稳定性;
42.s4)副转向电机控制器和副伺服驱动电机主要用于纠偏,其工作方法是:当主转向电机控制器控制主伺服驱动电机进行转向时,副伺服驱动电机停止转动等待指令,如果车轮出现打滑或转角过大,则主伺服驱动电机停止继续驱动转向轴向同一个方向转向,此时副转向电机控制器控制副伺服驱动电机驱动转向轴反向转动以纠正转向角度,从而消除主伺服驱动电机正反转切换时产生的延迟,实现对转向的精准控制。
43.本发明的智能车辆自动变道侧向控制系统的另外一种控制方法是在主电瓶断电的情况下,转向控制完全由副转向电机控制器和副伺服驱动电机接管,具体地采用以下步骤:s1)当主电瓶突然失去电力时,由副转向电机控制器控制转向灯开关打开转向灯,使ups逆变器连通备用电瓶与副转向电机控制器之间的线路,并控制电磁离合器闭合来传递动力;s2)由副转向电机控制器控制副伺服驱动电机工作来驱动转向轴转动,从而提高自动驾驶的安全性。
44.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技
术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1