软体机器人运动控制方法与流程
1.本发明涉及球形机器人技术领域,具体涉及一种软体机器人运动控制方法。
背景技术:
2.球形机器人为外壳是球形的移动机器人。球形机器人将各种驱动、控制和执行机构放在外壳内,可以起到保护内部机构的作用。
3.1996年,赫尔辛基科技大学的aarne halme,jussi suomela和torsten schonberg等人研制了第一款球形机器人。机器人以摩擦轮驱动外壳转动达到滚动的效果所示机器人的结构示意图。1997年,意大利比萨大学的antonio bicchi等人研制了sphericle球形机器人,机器人将一个四轮小车放在球体内部,增加机器人的稳定性。2006年,日本神户大学的toshiaki otani等人将陀螺控制与球形机器人结合,增加球形机器人的稳定性。2006年,哈尔滨工业大学的邓宗全教授等人研制了hit spherical robot球形机器人。
4.专利文献cn100532181a公开了一种多运动态球形机器人,它具有螺旋伸缩机构和分别连于螺旋伸缩机构两端两个半球形壳体,螺旋伸缩机构可以驱动两半球形壳体闭合或展开,使机器人分别处于球态和两轮态两种运动形态。该球形机器人的半球形壳体硬度偏高,以实现两轮态行进的需求。
技术实现要素:
5.本发明的目的是提供一种软体机器人运动控制方法,以从新的技术路线的角度驱动一体机器人运动。
6.本发明的技术方案是:
7.一种软体机器人运动控制方法,所述软体机器人包括左弹性气囊、中连接部、右弹性气囊,以及气泵和气囊调压组件,所述中连接部上设有旋转驱动流道和补气流道,所述气泵的吸气口与所述补气流道管道连通,所述气泵的排气口与所述旋转驱动流道管道连通,包括:
8.滚动行进步骤,通过气囊调压组件调整左弹性气囊和右弹性气囊内气压,使所述软体机器人形成哑铃形或胶囊形,通过所述气泵驱动所述软体机器人滚动;
9.转弯行进步骤,通过气囊调压组件调整左弹性气囊和右弹性气囊内气压,使所述软体机器人一侧外径≥所述中连接部外径>另一侧外径,通过所述气泵驱动所述软体机器人转弯。
10.优选的,所述气泵和所述气囊调压组件设置在左弹性气囊和右弹性气囊中的至少一个内。
11.优选的,所述补气流道在所述中连接部侧面设有补气口,所述旋转驱动流道在所述中连接部的侧面设有至少两个排气口。
12.进一步优选的,所述中连接部为齿轮,在所述齿轮的中部设有环形凹槽,所述补气口和所述排气口均设置在所述环形凹槽内。
13.优选的,包括以下步骤:
14.所述软体机器人滚动状态中需要向左侧转弯时,使用所述气囊调压组件分别调整所述左弹性气囊、所述右弹性气囊内压力,以使所述左弹性气囊形成半球体,且所述右弹性气囊的球体半径大于所述中连接部的半径,则所述软体机器人向左转弯;
15.所述软体机器人滚动状态中需要向右侧转弯时,使用所述气囊调压组件分别调整所述左弹性气囊、所述右弹性气囊内压力,以使所述右弹性气囊形成半球体,且所述左弹性气囊的球体半径大于所述中连接部的半径,则所述软体机器人向右转弯。
16.优选的,包括以下步骤:
17.所述软体机器人静止状态中需要转弯时,使用所述气囊调压组件分别调整所述左弹性气囊、所述右弹性气囊内压力,以使所述左弹性气囊形成半球体,且所述右弹性气囊的球体半径大于所述中连接部的半径,或者,使所述右弹性气囊形成半球体,且所述左弹性气囊的球体半径大于所述中连接部的半径;
18.使用所述气囊调压组件维持所述左弹性气囊和所述右弹性气囊内压力,使用所述气囊调压组件向所述旋转驱动流道充气,从所述排气口排出的气流驱动所述软体机器人转弯。
19.一种软体机器人,包括中连接部、弹性壁和气囊调压组件;两个所述弹性壁分别设置在所述中连接部两侧并与所述中连接部密封连接,以分别形成左弹性气囊、右弹性气囊;所述中连接部上设有旋转驱动流道,从所述旋转驱动流道排出的气流用于驱动所述中连接部旋转;所述气囊调压组件设有气体输出口和气体回收口,所述气体输出口与所述旋转驱动流道的进气口、所述左弹性气囊的内腔、所述的右弹性气囊内腔相连通,所述气体回收口与所述左弹性气囊的内腔、所述的右弹性气囊内腔相连通。
20.优选的,所述气囊调压组件包括气泵、左弹性气囊放气阀和右弹性气囊放气阀,所述中连接部上还设有补气流道,所述补气流道在所述中连接部上形成有外露吸气口,所述气泵的吸气口与所述补气流道的出气口管道连通,所述气泵的排气口与所述左弹性气囊的内腔、所述右弹性气囊的内腔、所述旋转驱动流道的进口管道连通,所述左弹性气囊放气阀的进口与所述左弹性气囊管道连通,所述左弹性气囊放气阀的出口与所述补气流道相连通,所述右弹性气囊放气阀的进口与所述右弹性气囊管道连通,所述右弹性气囊放气阀的出口与所述补气流道相连通。
21.进一步优选的,所述气囊调压组件还包括控制处理器、左弹性气囊气压传感器和右弹性气囊气压传感器,所述左弹性气囊放气阀和右弹性气囊放气阀均选择电磁阀,所述控制处理器的输入端分别与左弹性气囊气压传感器的输出端、所述右弹性气囊气压传感器的输出端对应电连接,所述控制处理器的输出端分别与所述左弹性气囊放气阀的控制端、所述右弹性气囊放气阀的控制端对应电连接。
22.进一步优选的,所述气囊调压组件还包括控制处理器和陀螺仪,所述左弹性气囊放气阀和右弹性气囊放气阀均选择电磁阀,所述陀螺仪固定在所述中连接部上,所述控制处理器的输入端与所述陀螺仪的输出端对应电连接,所述控制处理器的输出端分别与所述左弹性气囊放气阀的控制端、所述右弹性气囊放气阀的控制端对应电连接。
23.进一步优选的,所述气囊调压组件还包括左弹性气囊补气阀、右弹性气囊补气阀和减压阀,所述气泵为流量可控型气泵,所述左弹性气囊补气阀和右弹性气囊补气阀均选
择电磁阀,所述气泵的排气口连接有四通管接头的a口,所述四通管接头的b口与所述左弹性气囊补气阀的进口管道连通,所述左弹性气囊补气阀的出口与所述左弹性气囊内腔管道连通,所述四通管接头的c口与所述右弹性气囊补气阀的进口管道连通,所述右弹性气囊补气阀的出口与所述右弹性气囊内腔管道连通,所述四通管接头的d口与所述减压阀的进口管道连通,所述减压阀的出口与所述旋转驱动流道的进气口管道连通,所述控制处理器的输出端分别与所述气泵的控制端、所述左弹性气囊补气阀的控制端、所述右弹性气囊补气阀的控制端对应电连接。
24.优选的,所述弹性壁由邵氏硬度a为10度的材料制作而成。
25.优选的,所述中连接部为圆柱体,所述旋转驱动流道包括至少两条分流道,所述分流道在所述中连接部的周面上形成有排气口,从所述排气口排出的气流方向与所述中连接部的径向方向设有>0
°
且≤90
°
的夹角。
26.优选的,所述旋转驱动流道有两套,分别为正向旋转驱动流道和反向旋转驱动流道。
27.本发明的有益效果是:
28.1.本发明方法可以实现一体机器人的滚动、转弯功能。
附图说明
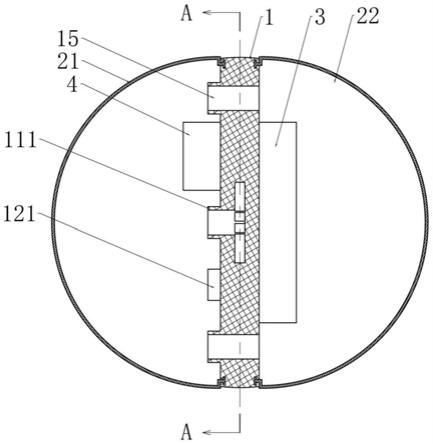
29.图1为一种软体机器人的剖视图。
30.图2为图1的a-a剖视图。
31.图3为一种软体机器人的中连接部的左视图。
32.图4为一种软体机器人的中连接部的右视图。
33.附图标记说明,1-中连接部,11-旋转驱动流道,111-旋转驱动流道管接头,12-补气流道,121-补气流道管接头,13-充电连接座预留孔,131-电线引出孔,141-电线穿孔,15-右弹性气囊连通孔,21-左弹性气囊,22-右弹性气囊,3-可充电电池,4-气泵。
具体实施方式
34.下面结合附图,以实施例的形式说明本发明,以辅助本技术领域的技术人员理解和实现本发明。除另有说明外,不应脱离本技术领域的技术知识背景理解以下的实施例及其中的技术术语。
35.一种软体机器人运动控制方法,软体机器人包括左弹性气囊、中连接部、右弹性气囊,以及气泵和气囊调压组件,中连接部的两侧分别与左弹性气囊、右弹性气囊固定连接,中连接部上设有旋转驱动流道和补气流道,气泵的吸气口与补气流道管道连通,气泵的排气口与旋转驱动流道管道连通,气泵和气囊调压组件可以固定设置在中连接部内,也可以固定设置在左弹性气囊内,还可以固定设置在右弹性气囊内。最好的,设置气泵和气囊调压组件时,注意软体机器人的重心在中连接部的中心处,这样其运动时不易偏心。包括:
36.滚动行进步骤,通过气囊调压组件调整左弹性气囊和右弹性气囊内气压,使软体机器人形成哑铃形或胶囊形,通过气泵将软体机器人外部的气体吸入后经旋转驱动流道排出,从旋转驱动流道排出的气流推动软体机器人滚动;
37.转弯行进步骤,通过气囊调压组件调整左弹性气囊和右弹性气囊内气压,使所述
软体机器人一侧外径≥所述中连接部外径>另一侧外径,通过所述气泵驱动所述软体机器人转弯。
38.优选的,补气流道在中连接部侧面设有补气口,旋转驱动流道在中连接部的侧面设有至少两个排气口。
39.进一步优选的,中连接部为齿轮,在齿轮的轮齿中部设有环形凹槽,这样,环形凹槽的两侧均设有齿牙,中连接部与地面接触并滚动时,其不易于打滑。这种形状的中连接部中,补气口和排气口宜设置在环形凹槽内。
40.一种软体机器人,参见图1-4,包括中连接部1、弹性壁和气囊调压组件。
41.两个弹性壁分别设置在中连接部1两侧并与中连接部1密封连接,以分别形成左弹性气囊21、右弹性气囊22。本实施例中,弹性壁由邵氏硬度a为10度的硅胶制作而成。硬度太低的易于损坏,太高的形变效率低,邵氏10度为最优硬度。
42.本实施例中,中连接部1为圆柱体,圆柱体滚动时的阻力小,平顺性好。在其它实施例中,中连接部1也可以选择正三角转子的形状。中连接部1的厚度越薄,软体机器人越容易侧偏,转弯效果越好;中连接部1的厚度越厚,软体机器人滚动时越不易偏转,从滚动模式切换为转弯模式的难度越高。
43.中连接部1上设有旋转驱动流道11,从旋转驱动流道11排出的气流用于驱动中连接部1旋转。旋转驱动流道包括至少两条分流道,每条分流道在中连接部1的周面上形成有排气口,从排气口排出的气流方向不与中连接部的径向方向相重合,从排气口排出的气流方向与中连接部1的径向方向垂直最好。
44.由于本实施例中中连接部1为圆柱体,在未在中连接部1周面开槽的情况下,从排气口排出的气流方向>90
°
时,中连接部1的壁体为阻挡气流,因此,从排气口排出的气流方向与中连接部1的径向方向宜设置成>0
°
且≤90
°
的夹角。一般的,从排气口排出的气流方向与中连接部1的径向方向设置成90
°
的夹角时,从排气口排出的气流带动中连接部1旋转的效果最好。
45.一般的,从旋转驱动流道11的排气口排出的气流且从旋转驱动流道11的排气口排出的气流作用力不抵消,就可以驱动中连接部1旋转。较简单的设置方式是,旋转驱动流道是由分流道以中连接部的轴线为旋转轴环形阵列布设在中连接部内,球形阵列的数目为两个以上,环形阵列的数目越多,驱动中连接部旋转的接续性越好。参见图1,本实施例中,分流道为螺旋形流道,环形阵列数目为6,故而,旋转驱动流道11在中连接部1的周面上形成有6个排气口;为了减少连接管数目,旋转驱动流道11设有1个进气口,它由旋转驱动流道管接头111形成,旋转驱动流道管接头111的中心线与中连接部的轴线相重合。在其它实施例中,分流道也可以是直流道,只要直流道的流道线不与中连接部的径向方向相重合即可。
46.气囊调压组件应能够输出气体及回收气体,回收的气体可以再利用,也可以排出软体机器人外部。现有技术中,输出气体的装置可以由化学反应输出气体,也可以使用气泵、抽风机、排风机等从机器从外部抽取气体,并输出气体。回收气体的装置可以是将左弹性气囊的剖分气体排入右弹性气囊,或将右弹性气囊的剖分气体排入左弹性气囊,也可以采用排出到机器人外部的方式实现。气囊调压组件设置在左弹性气囊及右弹性气囊内,并与中连接部1固定连接。气囊调压组件设有气体输出口和气体回收口,气体输出口与旋转驱动流道11的进气口、左弹性气囊21的内腔、右弹性气囊22内腔相连通,气体回收口与左弹性
气囊21的内腔、右弹性气囊22内腔相连通。
47.本实施例中,气囊调压组件包括气泵4、左弹性气囊放气阀和右弹性气囊放气阀。
48.为此,中连接部1上还设有补气流道12,补气流道12在中连接部1上形成有外露吸气口,外露吸气口设置在左弹性气囊21及右弹性气囊22外部。由于旋转驱动流道11也可以连通软体机器人外部与气囊内部,所以,理论上,在不干扰旋转驱动流道11功能的情况下,可以使用旋转驱动流道11闲置流道作为补气流道12。但实际中,多将补气流道12与旋转驱动流道11分别设置,以减轻控制复杂度。
49.参见图1,本实施例中,气泵4设置在左弹性气囊21内,并与中连接部1固定连接。气泵4的吸气口与补气流道12的出气口管道连通。气泵4的排气口与左弹性气囊21的内腔、右弹性气囊22的内腔、旋转驱动流道11的进口管道连通。本实施例中,为便于将从气泵4的排气口排出的气体分配至左弹性气囊21、右弹性气囊22和旋转驱动流道11内,气泵4选择流量可控型气泵,并增设了左弹性气囊补气阀、右弹性气囊补气阀和减压阀。气泵4的排气口连接有四通管接头的a口,四通管接头的b口与左弹性气囊补气阀的进口管道连通,左弹性气囊补气阀的出口与所述左弹性气囊内腔管道连通,四通管接头的c口与右弹性气囊补气阀的进口管道连通,右弹性气囊补气阀的出口与右弹性气囊内腔管道连通,四通管接头的d口与减压阀的进口管道连通,减压阀的出口与旋转驱动流道11的进气口管道连通。参见图1,由于气泵4设置在左弹性气囊21内,左弹性气囊补气阀、右弹性气囊补气阀、减压阀左弹性气囊、放气阀和右弹性气囊放气阀也设置在左弹性气囊21内。如此,左弹性气囊补气阀的出口是直接与左弹性气囊内腔管道连通的,右弹性气囊补气阀的出口与用于形成右弹性气囊连通孔15的管接头管道连接即可,减压阀的出口与旋转驱动流道管接头111管道连接即可。在气泵4的气流输出压力不低于减压阀的出口压力时,从旋转驱动流道11输出的气流是一致的,这样便于简化机器人的操控。
50.本实施例中,左弹性气囊放气阀的进口与左弹性气囊管道连通,左弹性气囊放气阀的出口与补气流道12相连通,右弹性气囊放气阀的进口与右弹性气囊管道连通,右弹性气囊放气阀的出口与补气流道12相连通。当然,左弹性气囊放气阀的出口也可以与旋转驱动流道11相连通,右弹性气囊放气阀的出口也可以与旋转驱动流道11相连通,但这样会扰动从旋转驱动流道11流出的气流流量,增大机器人的操控难度。
51.为了平衡中连接部1两侧的质量,用于为气囊调压组件供电的电池设置在右弹性气囊22内。本实施例中,用于为气囊调压组件供电的电池选择可充电电池,比如锂电池。
52.当然,左弹性气囊补气阀和左弹性气囊放气阀的功能也可以由二位三通换向阀合并实现,右弹性气囊补气阀和右弹性气囊放气阀的功能也可以由二位三通换向阀合并实现。
53.为便于机器人的操控,软体机器人还包括控制处理器、左弹性气囊气压传感器和右弹性气囊气压传感器。为此,左弹性气囊补气阀、右弹性气囊补气阀、左弹性气囊放气阀和右弹性气囊放气阀均选择电磁阀。控制处理器的输入端分别与左弹性气囊气压传感器的输出端、所述右弹性气囊气压传感器的输出端对应电连接,所述控制处理器的输出端分别与气泵4的控制端、左弹性气囊补气阀的控制端、右弹性气囊补气阀的控制端、左弹性气囊放气阀的控制端、右弹性气囊放气阀的控制端对应电连接。通过气压传感器测量气囊内气压,从而实现估计气囊形状的目的,进而估测中连接部的倾角。在其它实施例中,通过固定
在中连接部上的陀螺仪,控制处理器的输入端与陀螺仪的输出端对应电连接,也可以估测中连接部的倾角。
54.为了实现驱动软体机器人双向行进,可以在中连接部1上设置两套旋转驱动流道,这两套旋转驱动流道分别用于驱动软体机器人前进、后退。
55.本发明的软体机器人的转弯方法,包括以下步骤:
56.使用气囊调压组件分别调整左弹性气囊21、右弹性气囊22内压力,以使左弹性气囊21、中连接部1和右弹性气囊22形成胶囊形状;
57.使用气囊调压组件维持左弹性气囊21和右弹性气囊22内压力,使用气囊调压组件向旋转驱动流道11充气,从旋转驱动流道11的排气口排出的气流驱动软体机器人滚动;
58.软体机器人滚动状态中需要向左侧转弯时,使用气囊调压组件分别调整左弹性气囊21、右弹性气囊22内压力,以使左弹性气囊21形成半球体,且右弹性气囊22的球体半径大于中连接部1的半径,则软体机器人向左转弯;
59.软体机器人滚动状态中需要向右侧转弯时,使用气囊调压组件分别调整左弹性气囊21、右弹性气囊22内压力,以使右弹性气囊22形成半球体,且左弹性气囊21的球体半径大于中连接部1的半径,则软体机器人向右转弯。
60.使左弹性气囊21或右弹性气囊22形成半球体的方法是:使用与该气囊连通的气囊放气阀排出该气囊内剖分气体,弹性壁收缩,该气囊就会形成半球体。使左弹性气囊21或右弹性气囊22的球体半径大于中连接部1的半径的方法是:使用与该气囊连通的气囊补气阀向该气囊内充气,弹性壁扩张,该气囊的球体半径就可以大于中连接部1的半径。中连接部一侧气囊形成半球体,另一侧气囊的球体半径大于中连接部直径时,中连接部就会向较小球体侧侧倾,在滚动惯性下,就会向该侧转弯。
61.需要由转弯切换成滚动时,使用气囊调压组件分别调整左弹性气囊21、右弹性气囊22内压力,以使左弹性气囊21、中连接部1和右弹性气囊22形成胶囊形状;使用气囊调压组件维持左弹性气囊21和右弹性气囊22内压力,使用气囊调压组件向旋转驱动流道11充气,从旋转驱动流道11的排气口排出的气流驱动软体机器人滚动。
62.本方法中,在软体机器人转弯过程中,也可以使用气囊调压组件向旋转驱动流道11充气,从旋转驱动流道11的排气口排出的气流驱动软体机器人旋转。
63.又一种本发明的软体机器人的转弯方法,包括以下步骤:
64.软体机器人静止状态中需要转弯时,使用气囊调压组件分别调整左弹性气囊21、右弹性气囊22内压力,以使左弹性气囊21形成半球体,且右弹性气囊22的球体半径大于中连接部1的半径,或者,使右弹性气囊22形成半球体,且左弹性气囊21的球体半径大于中连接部1的半径;
65.使用气囊调压组件维持左弹性气囊21和右弹性气囊22内压力,使用气囊调压组件向旋转驱动流道11充气,从旋转驱动流道11的排气口排出的气流驱动软体机器人转弯。
66.左弹性气囊21形成半球体,且右弹性气囊22的球体半径大于中连接部1的半径时,软体机器人转弯方向与旋转驱动流道11在中连接部上的布设方式有关。
67.上面结合附图和实施例对本发明作了详细的说明。应当明白,实践中无法穷尽地说明所有可能的实施方式,在此通过举例说明的方式尽可能的阐述本发明得发明构思。在不脱离本发明的发明构思、且未付出创造性劳动的前提下,本技术领域的技术人员对上述
实施例中的技术特征进行取舍组合、具体参数进行试验变更,或者利用本技术领域的现有技术对本发明已公开的技术手段进行常规替换形成的具体的实施例,均应属于为本发明隐含公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1