多足行走机器人的制作方法
1.本发明涉及行走机器人技术领域,特别涉及一种多足行走机器人。
背景技术:
2.在大型涵洞式钢构件和大型管道等制造行业的特点生产环节中,通常需要使用行走机器人进行设备的输送运输,比如建筑行业大型钢箱梁、桥梁工程大型钢箱梁、造船行业大型钢箱梁以及石油天然气行业大型管道制造过程中的内部焊接、喷砂、探伤、视觉检查等工作,但是由于这些场合的路面均不平整,存在很多阻拦槛,使得现有的采用轮子的输送方式难以进行输送,对此设计一种多足行走机器人。
3.
技术实现要素:
4.根据本发明实施例,提供了一种多足行走机器人,包含:机器人底层;机器人顶层,机器人顶层位于机器人底层的顶部;动力模块,动力模块与机器人底层和机器人顶层相连,用于提供动力;导向模块,导向模块与机器人底层和机器人顶层相连,用于进行导向;支撑模块,支撑模块与机器人底层和机器人顶层相连。
5.进一步,动力模块包含:电机,电机与机器人顶层的底部相连;减速器,减速器与电机的输出端相连;齿轮,齿轮与减速器的输出端相连;齿条,齿条设置在机器人底层的顶部,齿条与齿轮相互啮合。
6.进一步,动力模块还包含:线缆拖链,线缆拖链沿齿条的长度方向铺设在机器人底层的顶层,且位于齿条的一侧,用于收纳电机和减速器的连接线缆。
7.进一步,导向模块包含:直线滑轨,直线滑轨设置在机器人底层的顶部;滑块,滑块设置在机器人顶层的底部,滑块与直线滑轨滑动连接。
8.进一步,支撑模块包含:两对第一升降支脚,两对第一升降支脚对称设置在机器人顶层的底部两侧;两对第二升降支脚,两对第二升降支脚对称设置在机器人底层的底部两侧。
9.进一步,第一升降支脚包含第一电动推杆和第一支撑腿,第一电动推杆与机器人顶层的底部相连,第一支撑腿与第一电动推杆的输出端相连;第二升降支脚包含第二电动推杆和第二支撑腿,第二电动推杆与机器人底层的底部相连,第二支撑腿与第二电动推杆的输出端相连。
10.进一步,第一升降支脚和第二升降支架的数量至少为两对。
11.进一步,支撑模块包含:两对第一摆动支脚,两对第一摆动支脚对称设置在机器人顶层的底部两侧;两对第二摆动支脚,两对第二摆动支架对称设置在机器人底层的底部两侧。
12.进一步,第一摆动支脚包含:第一摆动驱动器和第一摆动腿,第一摆动驱动器与机器人顶层的底部相连,第一摆动腿活动设置在机器人顶层的底部且与第一摆动驱动器相连,第一摆动驱动器驱动第一摆动腿摆动;第二摆动支脚包含:第二摆动驱动器和第二摆动腿,第二摆动驱动器与机器人底层的底部相连,第二摆动腿活动设置在机器人底层且与第二摆动驱动器相连,第二摆动驱动器驱动第二摆动腿摆动。
13.进一步,第一摆动支脚和第二摆动支脚的数量至少为两对。
14.根据本发明实施例的多足行走机器人,本案行走机器人实现行走式的输送运输,可以在路面不平整,存在很多阻拦槛的地方进行行走式的输送,不影响输送,保证焊接、喷砂、探伤、视觉检查等设备的输送运输,让焊接、喷砂、探伤、视觉检查等工作可正常进行。
15.要理解的是,前面的一般描述和下面的详细描述两者都是示例性的,并 且意图在于提供要求保护的技术的进一步说明。
16.附图说明
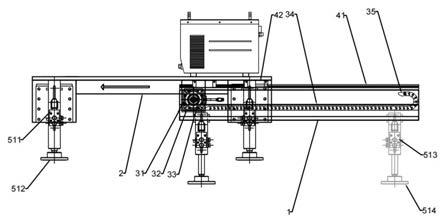
17.图1为根据本发明实施例多足行走机器人的第一种形式的机器人顶层行走状态的主视结构示意图。
18.图2为根据本发明实施例多足行走机器人的第一种形式的左视结构示意图。
19.图3为根据本发明实施例多足行走机器人的第一种形式的机器人底层行走状态的主视结构示意图。
20.图4为根据本发明实施例多足行走机器人的第二种形式的机器人顶层行走状态的主视结构示意图。
21.图5为根据本发明实施例多足行走机器人的第二种形式的左视结构示意图。
22.图6为根据本发明实施例多足行走机器人的第二种形式的机器人底层行走状态的主视结构示意图。
23.具体实施方式
24.以下将结合附图,详细描述本发明的优选实施例,对本发明做进一步阐述。
25.首先,将结合图1~6描述根据本发明实施例的多足行走机器人,用于焊接、喷砂、探伤、视觉检查等设备的输送运输,其应用场景很广。
26.如图1~6所示,在本实施例中,本发明实施例的多足行走机器人,具有机器人底层1、机器人顶层2、动力模块、导向模块以及支撑模块。机器人顶层2位于机器人底层1的顶部,动力模块与机器人底层1和机器人顶层2相连,用于提供动力,导向模块与机器人底层1和机器人顶层2相连,用于进行导向,保证机器人底层1和机器人顶层2相互移动时的稳定性,支撑模块与机器人底层1和机器人顶层2相连,用于起到支撑的作用,其中,动力模块用于与支撑模块相互配合,从而让机器人底层1和机器人顶层2相互移动实现位置移动,机器人顶层2
的顶部可以放置需要运输使用的焊接、喷砂、探伤、视觉检查等设备,从而进行相应的焊接、喷砂、探伤、视觉检查等工作,进一步,如图1~6所示,在本实施例中,动力模块包含:电机31、减速器32、齿轮33以及齿条34。电机31与机器人顶层2的底部相连,减速器32与电机31的输出端相连,齿轮33与减速器32的输出端相连,齿条34设置在机器人底层1的顶部,齿条34与齿轮33相互啮合,其中电机31为伺服电机31,用于提供动力,减速器32为精密行星齿轮33减速器32,通过电机31转动可以通过减速器32带动齿轮33转动,从而根据机器人底层1和机器人顶层2哪个处于支撑,若干机器人底层1支撑,则齿轮33在齿条34上转动,从而带动机器人顶层2向前延伸,然后机器人底顶层在支撑,此时电机31转动,可以使得齿条34在齿轮33的带动下进行移动,从而带动机器人底层1向前移动,通过机器人底层1和机器人顶层2这种交替进行移动,实现运输输送。
27.进一步,如图1~6所示,在本实施例中,动力模块还包含:线缆拖链35,线缆拖链35沿齿条34的长度方向铺设在机器人底层1的顶层,且位于齿条34的一侧,用于收纳电机31和减速器32的连接线缆,对电机31和减速器32的连接线缆进行保护。
28.进一步,如图1~6所示,在本实施例中,导向模块包含:直线滑轨41和滑块42。直线滑轨41设置在机器人底层1的顶部,滑块42设置在机器人顶层2的底部,滑块42与直线滑轨41滑动连接,通过滑块42和直线滑轨41的相互配合可对机器人底层1和机器人顶层2的相互移动进行导向的作用,保证移动时候的稳定性。
29.进一步,如图1~3所示,在本实施例中,支撑模块包含:两对第一升降支脚以及两对第二升降支脚。两对第一升降支脚对称设置在机器人顶层2的底部两侧,两对第二升降支脚对称设置在机器人底层1的底部两侧,两对第一升降支脚以及两对第二升降支脚分别用于对机器人顶层2和机器人底层1进行支撑控制,并与动力模块配合从而实现机器人顶层2和机器人底层1行走式的输送。
30.进一步,如图1~3所示,在本实施例中,第一升降支脚包含第一电动推杆511和第一支撑腿512,第一电动推杆511与机器人顶层2的底部相连,第一支撑腿512与第一电动推杆511的输出端相连,通过第一电动推杆511可以控制第一支撑腿512的升降;第二升降支脚包含第二电动推杆513和第二支撑腿514,第二电动推杆513与机器人底层1的底部相连,第二支撑腿514与第二电动推杆513的输出端相连,通过第二电动推杆513可以控制第二支撑腿514的升降,并且其中第一升降支脚和第二升降支脚的驱动也可采用气缸升降或液压缸升降。
31.进一步,如图1~3所示,在本实施例中,第一升降支脚和第二升降支架的数量至少为两对,从而保证设备行走时的稳定性。
32.进一步,如图4~6所示,在本实施例中,支撑模块包含:两对第一摆动支脚以及两对第二摆动支脚。两对第一摆动支脚对称设置在机器人顶层2的底部两侧,两对第二摆动支架对称设置在机器人底层1的底部两侧,第一摆动支脚和第二摆动支脚分别用于对机器人顶层2和机器人底层1进行支撑控制,并与动力模块配合从而实现机器人顶层2和机器人底层1行走式的输送。
33.进一步,如图4~6所示,在本实施例中,第一摆动支脚包含第一摆动驱动器521和第一摆动腿522,第一摆动驱动器521与机器人顶层2的底部相连,第一摆动腿522活动设置在
机器人顶层2的底部且与第一摆动驱动器521相连,第一摆动驱动器521驱动第一摆动腿522摆动,进行90度的旋转,进行第一摆动腿522的支撑和收起的切换,第一摆动驱动器521为电机齿轮驱动器;第二摆动支脚包含:第二摆动驱动器523和第二摆动腿524,第二摆动驱动器523与机器人底层1的底部相连,第二摆动腿524活动设置在机器人底层1且与第二摆动驱动器523相连,第二摆动驱动器523驱动第二摆动腿524摆动,进行90度的旋转,进行第二摆动腿524的支撑和收起的切换,第二摆动驱动器523为电机齿轮驱动器。
34.进一步,第一摆动支脚和第二摆动支脚的数量至少为两对,保证设备行走实时的稳定性。
35.在使用的时候,可根据需要将焊接、喷砂、探伤、视觉检查等设备放置固定在机器人顶层2的顶部,当需要进行输送的时候,先将两对第一升降支脚上升不在支撑(即两对第一摆动支脚收起不在支撑),两对第二升降支脚下降进行支撑(即两对第二摆动支脚摆动进行支撑),此时让电机31转动,通过减速器32使得齿轮33转动,让齿轮33在齿条34上进行转动移动,从而带动机器人顶层2向前移动至合适位置停止,然后两对第一升降支脚下降进行支撑(即两对第一摆动支脚摆动进行支撑),两对第二升降支脚上升不在支撑(即两对第二摆动支脚收起不在支撑),此时让电机31转动,通过减速器32使得齿轮33转动,让齿条34在齿轮33上进行移动,从而带动机器人底层1进行向前移动至合适位置,从而依次反复循环进行行走式移动,将焊接、喷砂、探伤、视觉检查等设备输送至指定位置。
36.以上,参照图1~6述了根据本发明实施例的多足行走机器人,本发明行走机器人实现多足交替行走的方式,特点是:可以在路面不平整,存在很多阻拦槛的地方行走。在多足行走机器人上面加装机械手臂、焊机、视觉系统,可以实现多种场景下的工作,在地面有障碍的环境里、在管道里,实现焊接、探伤、视觉检查等工作,多足机器人还可以实现在障碍环境下的运输工作。在工业应用非常广泛,解放的人力,提升生产效率。
37.需要说明的是,在本说明书中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包含
……”
限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
38.尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1