一种用于负压式爬壁机器人的双层柔性吸附腔
1.本发明属于爬壁机器人领域,更具体地,涉及一种用于负压式爬壁机器人的双层柔性吸附腔。
背景技术:
2.爬壁机器人是一种能吸附在工件表面对工件进行磨抛、钻孔、除锈等作业的机器人;负压式爬壁机器人则是利用负压原理将机器人压在墙面上从而实现吸附的爬壁机器人。
3.但由于工件表面往往为不平整表面,通常存在突起,如铆钉、焊缝等;故负压式爬壁机器人在工件表面移动时,吸附腔唇边容易受表面突起的阻挡或顶起而产生缝隙,导致漏气脱附。因此,亟需一种可解决负压式爬壁机器人在不平整表面移动时的漏气脱附问题的吸附腔。
技术实现要素:
4.针对现有技术的以上缺陷或改进需求,本发明提供了一种用于负压式爬壁机器人的双层柔性吸附腔,其目的在于,提高爬壁机器人吸附腔的适应性,解决负压式爬壁机器人在不平整表面移动时的漏气脱附问题。
5.为实现上述目的,本发明提出了一种用于负压式爬壁机器人的双层柔性吸附腔,包括依次连接的上层板、上层吸附腔、中间板和下层吸附腔,其中:
6.所述上层吸附腔为带褶的柔性风腔罩,所述下层吸附腔为环形柔性罩,该下层吸附腔的内轮廓比所述上层吸附腔的外轮廓大,并通过环形的中间板连接在一起,形成阶梯型结构,上层吸附腔与下层吸附腔连通;所述上层板和中间板均为刚性板,上层板上安装有风机,该风机用于制造上层吸附腔和下层吸附腔内负压环境。
7.作为进一步优选的,所述中间板下端均匀安装有多个牛眼轴承,且下层吸附腔的下底面低于该牛眼轴承的下端。
8.作为进一步优选的,所述下层吸附腔的内轮廓为上层吸附腔外轮廓的向外等距实体,且距离为1cm~3cm。
9.作为进一步优选的,所述下层吸附腔为环形海绵罩。
10.作为进一步优选的,所述环形海绵罩的内部为海绵,表面为布基胶带。
11.作为进一步优选的,所述上层板和中间板均为碳板。
12.作为进一步优选的,所述上层板上安装有钣金件,该钣金件用于与爬壁机器人的底盘连接。
13.总体而言,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点:
14.1.本发明将吸附腔设计为双层阶梯型结构,其能够利用内外气压差将下层吸附腔紧压在被吸附表面,吸附腔经过突起时,柔性的下层吸附腔会发生形变,紧密地包裹住突
起,保证气密性;同时上层吸附腔为带褶的风腔罩,机器人在变曲率表面移动时,上层板距表面的距离会发生变化,而且上层板和表面切向的夹角也会发生变化,带褶的风腔罩凭借其柔韧性能够很好地适应这些变化;本发明有效地解决了负压式爬壁机器人在不平整表面移动时的漏气脱附问题。
15.2.本发明在中间板下端设计有牛眼轴承,且下层吸附腔的下底面低于牛眼轴承的下端,从而使下层吸附腔受压时,下层吸附腔先发生压缩形变,牛眼轴承再接触吸附面承受压力,下层吸附腔的压缩形变能够为吸附腔与表面的贴合提供预紧力;同时,牛眼轴承与吸附表面的摩擦为滚动摩擦,故通过下层吸附腔中的牛眼轴承能够减少吸附腔与吸附表面的摩擦力,显著地降低机器人的运动阻力。
16.3.本发明下层吸附腔的内轮廓为上层吸附腔外轮廓的向外等距实体,向外等距实体部分由中间板连接,其作为受压区域,当吸附腔内部形成负压时,受压区域受到大气压的压力,使得中间板将下层吸附腔压在墙面上,且向外等距实体可保证受压的均匀和稳定性;同时进一步确定该向外距离为1cm~3cm,适宜的受压范围可便于得到合适的压力大小,从而避免压力过小产生的脱附问题,以及压力过大影响爬壁过程流畅性的问题。
17.4.本发明中下层吸附腔优选为环形海绵罩,且该海绵罩表面为布基胶带,内部为海绵,工作时,内部海绵能够发生形变适应表面突起,同时表面的布基胶带有很好的耐磨性;此外,上下层板优选为碳板,可在保证刚度的情况下,减轻柔性吸附腔的整体重量。
附图说明
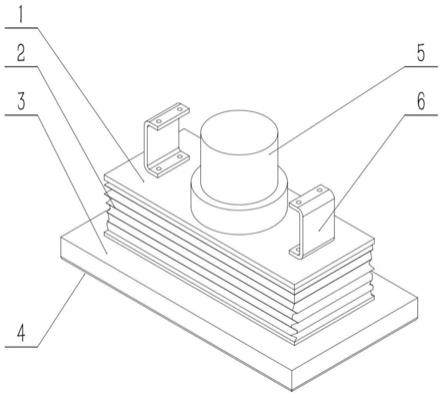
18.图1为本发明实施例用于负压式爬壁机器人的双层柔性吸附腔结构的整体俯视示意图;
19.图2为本发明实施例用于负压式爬壁机器人的双层柔性吸附腔结构的整体仰视示意图;
20.图3中(a)、(b)为本发明实施例双层柔性吸附腔中上下层板及吸附腔相对位置的示意图及剖视图;
21.图4为本发明实施例双层柔性吸附腔的上层板结构示意图;
22.图5为本发明实施例双层柔性吸附腔的上层吸附腔结构示意图;
23.图6为本发明实施例双层柔性吸附腔的中间板结构示意图;
24.图7为本发明实施例双层柔性吸附腔的下层吸附腔结构示意图;
25.图8中(a)、(b)为本发明实施例双层柔性吸附腔的牛眼轴承安装高度示意图及剖视图。
26.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:1-上层板,2-上层吸附腔,3-中间板,4-下层吸附腔,5-风机,6-钣金件,7-牛眼轴承。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
28.本发明实施例提供的一种用于负压式爬壁机器人的双层柔性吸附腔,如图1和图2所示,包括依次连接的上层板1、上层吸附腔2、中间板3和下层吸附腔4,其中:
29.如图5所示,所述上层吸附腔2为带褶的风腔罩,其具有很好的柔韧性,机器人在变曲率表面移动时,上层板1距表面的距离会发生变化,而且上层板1和表面切向的夹角也会发生变化,而上层吸附腔2位于上层板1和表面之间,上层吸附腔凭借其柔韧性能够很好地适应这些变化。
30.如图7所示,所述下层吸附腔4为环形柔性罩,优选为环形海绵罩,该海绵罩表面为布基胶带,内部为海绵,能够发生形变适应表面突起,同时有很好的耐磨性。
31.进一步的,如图3中(a)、(b)所示,下层吸附腔4的内轮廓比所述上层吸附腔2的外轮廓大,并通过环形的中间板3连接在一起,形成阶梯型结构,上层吸附腔2与下层吸附腔4连通;即中间板3为一个环形板,内轮廓与上层吸附腔2内轮廓重合,外轮廓与下层吸附腔4外轮廓重合,如图6所示。
32.更进一步的,所述下层吸附腔4的内轮廓为上层吸附腔2外轮廓的向外等距实体,且距离为1cm~3cm,优选为2cm;下层吸附腔4内轮廓与上层吸附腔2外轮廓之间的区域为受压区域,当吸附腔内部形成负压时,受压区域受到大气压的压力,中间板3会将下层吸附腔压在墙面上,当吸附腔经过突起时,受压的下层吸附腔发生形变包裹住突起,能保证很好的气密性。
33.所述上层板1和中间板3均为刚性板,优选为碳板。
34.如图4所示,上层板1中间有一个洞,作为风机5的进气口,风机5与上层吸附腔2连通;风机5工作时只要产生微弱的气压差,即可在上下层吸附腔同步产生压力,上层吸附腔的压力给机器人提供吸附力,下层吸附腔的压力保证了吸附腔的气密性。
35.进一步的,如图8中(a)、(b)所示,中间板3内轮廓周围均布螺纹孔,牛眼轴承7通过螺纹连接在中间板3上,用于减少吸附腔与吸附表面的摩擦力。牛眼轴承7与吸附表面的摩擦为滚动摩擦,大大减少了摩擦力,显著地降低了爬壁机器人的运动阻力。同时,下层吸附腔4的下底面低于牛眼轴承7的下端,因此当下层吸附腔4受压时,下层吸附腔4先发生压缩形变,牛眼轴承7再接触吸附面承受压力,下层吸附腔4的压缩形变能够为吸附腔与表面的贴合提供预紧力。
36.进一步的,上层板1上通过螺栓连接有钣金件6,钣金件6上端可通过螺栓与机器人底盘连接,以此来实现该双层吸附腔在机器人底盘上的安装。
37.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1