三驱动可调节闭链腿部机构
1.本发明属于移动机器人技术领域,具体来说涉及一种三驱动可调节闭链腿部机构。
背景技术:
2.美国的波士顿动力公司研制的bigdog四足机器人的腿部结构是典型的开链式结构,在腿部结构的每个关节都有电机控制,能够适应各种不同类型的环境。闭链腿部结构一般只有一个自由度,通过一个电机就可以实现控制驱动,且控制稳定性良好。theo jansen发明的海滩行走机械stranbeest是闭链腿部结构的典型,所采用的腿部结构是具有三个复合铰链的八连杆机构,其前后腿完全对称并共享同一个曲柄。它是一个由多个平面连杆结构并连起来形成的机器人,它的相邻曲柄间的相位差固定,稳定性极好。
3.与轮式移动机器人相比,腿式机器人有对复杂环境有更好的适应性和灵活性。闭链腿式结构特点一般是单自由度驱动曲柄的形式,这种结构设计使步态固定轨迹单一,不能适应复杂的地面环境。但是它有很多优点,能够使步态轨迹连续,曲柄整周运动相比较反复换向驱动,驱动器频繁正反转切换所带来的冲击和增加能量损失,这对足式机器人的移动速度,运动效率和承载能力都以一定的影响。整周运动提高了机器人的移动效率,减少能量损失,降低控制算法难度。驱动电机安装在机架上,减小腿部结构的惯性,具有上述结构的闭链装置主要有chebyshev机构、watt机构、stephenson机构、jansen机构、klann机构。开链腿式结构特点自由度多,足部轨迹灵活多样,但腿部承载能力弱,对电机重量也有相应的要求。因此为了发挥闭链腿式机器人的结构特点需要对现有传统结构进行改进,增加自由度目的是使足部轨迹不再单一化,能够更好适应复杂地面环境。
4.目前,对于足式机器人闭链腿部结构设计有许多设计思路,依据经典的闭链结构进行改进,提高闭链腿部结构的移动效率、承载能力和稳定性。但是研究的思路都存在各自的短板,中国专利cn103395457b公开了“一种基于混合驱动的多足移动装置”,通过伺服电机和大功率电机的双驱动控制,其中一个自由度为单向恒速驱动的曲柄,提供腿部机构的主动力,其余自由度为往复运动的伺服控制自由度,进行腿部机构的伺服调节控制。能够实现特定轨迹的行走,但是轨迹的横向距离无法改变,不能调节步长。比如行走过程中足部点目标逼近问题无法得到解决。中国专利cn109178135a公开了“一种双驱动模式闭链腿部机构”,通过两个旋转电机的双驱动控制,调整电动机实现步行机器人的柔性调节,提出klann机构上增加一个转动调整的自由度,调整机架铰接位置来实现连续变化的足部轨迹。但是不能在足部工作空间内输出特定的规划轨迹,每条轨迹固定,特定的步长对应特定的轨迹,通过轨迹曲线簇看出抬腿高度增加时跨步距减小,抬腿高度减小时跨步距增加。因此上述两种方法都存在各自不足,对于复杂地形的适应能力都较弱。
技术实现要素:
5.针对现有技术的不足,本发明的目的在于提供一种三驱动可调节闭链腿部机构,
该三驱动可调节闭链腿部机构具有承载性好、效率高、适应性强的特点,能够实现在复杂环境下越障、跨沟、目标逼近的行走过程。
6.本发明的目的是通过下述技术方案予以实现的。
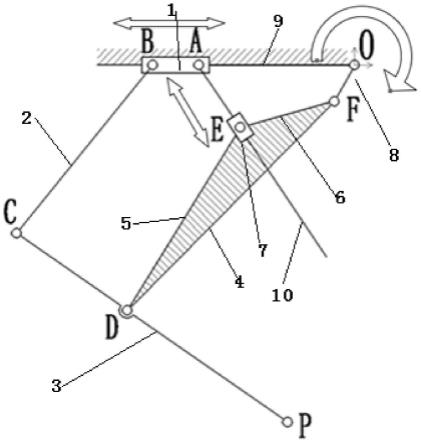
7.一种三驱动可调节闭链腿部机构,包括:第一滑动轨道、第二滑动轨道、第一连接杆、第二连接杆、第三连接杆、第四连接杆、第五连接杆、第六连接杆、第一滑块和第二滑块,所述第一滑块安装在所述第一滑动轨道上且能够沿该第一滑动轨道滑动,所述第二滑块安装在所述第二滑动轨道上且能够沿该第二滑动轨道滑动,所述第一滑块的一端与所述第二滑动轨道的上端铰接且铰接点为a点,所述第一滑块的另一端与所述第一连接杆的上端铰接且铰接点为b点,a点和b点的连线与所述第一滑动轨道的长度方向平行,所述第二连接杆的上端与所述第一连接杆的下端铰接且铰接点为c点,所述第三连接杆的上端和所述第四连接杆的下端固装且均与所述第二滑块铰接且铰接点为e点,所述第三连接杆的下端与所述第六连接杆的下端固装且连接点为d点,所述d点铰接在所述第二连接杆上,所述第四连接杆的上端和所述第六连接杆的上端固装且连接点为f点,所述f点与所述第五连接杆的下端铰接,在第一滑动轨道上设置有o点,所述o点靠近所述a点且远离所述b点,一旋转轴从所述o点伸出并与所述第五连接杆的上端固装,以使第五连接杆能够绕所述o点旋转;
8.所述第二连接杆下端安装有足部,且安装所述足部处为p点。
9.在上述技术方案中,所述a点和b点之间的距离为80mm~90mm。
10.在上述技术方案中,所述b点和c点之间的距离为410mm~420mm。
11.在上述技术方案中,所述c点和d点之间的距离为250mm~270mm。
12.在上述技术方案中,所述d点和e点之间的距离为310mm~330mm。
13.在上述技术方案中,所述e点和f点之间的距离为160mm~180mm。
14.在上述技术方案中,所述o点和f点之间的距离为60mm~90mm。
15.在上述技术方案中,所述d点和f点之间的距离为480mm~490mm。
16.在上述技术方案中,所述d点和p点之间的距离为370mm~380mm。
17.在上述技术方案中,所述a点和e点之间的距离最大为100mm~350mm。
18.在上述技术方案中,所述a点和o点之间的距离最大为170mm~430mm。
19.在上述技术方案中,所述第一滑动轨道为第一滚珠丝杠的螺杆,所述第一滑块为第一滚珠丝杠的滚珠螺母,还包括与第一滚珠丝杠的螺杆轴接的第一电机,用于驱动所述第一滑块在所述第一滑动轨道上滑动。
20.在上述技术方案中,所述第二滑动轨道为第二滚珠丝杠的螺杆,所述第二滑块为第二滚珠丝杠的滚珠螺母,还包括与第二滚珠丝杠的螺杆轴接的第二电机,用于驱动所述第二滑块在所述第二滑动轨道上滑动。
21.在上述技术方案中,所述旋转轴与第三电机轴接,用于驱动所述第五连接杆绕所述o点旋转。
22.本发明的有益效果如下:
23.(1)三驱动可调节闭链腿部机构,进行第六连接杆4与第二滑块铰接位置进行偏置结构设计,增加第三连接杆5和第四连接杆6,从而第三连接杆5、第四连接杆6和第六连接杆4的首尾连接的三个转动副不在一条直线上,三驱动可调节闭链腿部机构,在越障环境下,更能够增大足部跨越高度范围。
24.(2)驱动数为三个,第二电机和第三电机驱动虽然能够在运动空间上规划足部轨迹,但是只能限制在纵向距离上,横向距离调节范围很小,要使横向距离变化范围更大,需要引入另一个第一电机驱动。因为第五连接杆要整周连续运动,步距长不能要求,导致不能够在目标点逼近或跨沟等场景下运动,缺乏对复杂地面的适应能力,因此改变a点和o点的长度,使足部轨迹的步长在有限范围内能够变化,变化范围在238mm-536mm。
25.(3)通过改变由第二滑动轨道10、第四连接杆6、第五连接杆8和第一滑动轨道9组成的曲柄摇杆机构尺寸改变极位夹角,从而对占空比进行调整。占空比是指支撑相时间在整个周期时间内的百分比,支撑相在整个周期的不同占比对于腿部的运动状态有不同的效果。当占空比为0.5时,周期内支撑相时间等于摆动相时间,两个三驱动可调节闭链腿部机构换相时能够很好的衔接在一起,不会出现两个三驱动可调节闭链腿部机构同时在支撑相或摆动相的情况。当占空比小于0.5时,在运动过程中会出现两个三驱动可调节闭链腿部机构都在摆动相时处于腾空状态。这样的占空比会安装有两个三驱动可调节闭链腿部机构的机器人处于奔跑的过程。当占空比大于0.5时,在运动过程中会出现两个三驱动可调节闭链腿部机构都在支撑相处于触地状态,这样的占空比会使安装有两个三驱动可调节闭链腿部机构的机器人处于慢走的过程中。因此在行走之前,通过调整由第二滑动轨道、第四连接杆,第五连接杆和第一滑动轨道组成的曲柄摇杆机构尺寸大小来调整占空比大小来适应不同场景下的运动。
附图说明
26.图1为本发明三驱动可调节闭链腿部机构的原理图;
27.图2a为本发明三驱动可调节闭链腿部机构的正视图;
28.图2b为本发明三驱动可调节闭链腿部机构的立体结构示意图;
29.图3为机架的结构示意图(未安装第一滚珠丝杠);
30.图4为机架的结构示意图(安装第一滚珠丝杠和第一电机);
31.图5为第一电机座的结构示意图;
32.图6a为第五连接杆旋转一周p点轨迹的分布图(a点-e点的距离长度设置为290mm);
33.图6b为第五连接杆旋转一周p点轨迹的分布图(a点-e点的距离长度设置为330mm);
34.图7a为第五连接杆旋转一周p点轨迹的分布图(最大步长);
35.图7b为第五连接杆旋转一周p点轨迹的分布图(最小步长);
36.图8a为直线型的三驱动可调节闭链腿部机构最小抬腿高度;
37.图8b为直线型的三驱动可调节闭链腿部机构最大抬腿高度;
38.图8c为三角型的三驱动可调节闭链腿部机构最小抬腿高度;
39.图8d为三角型的三驱动可调节闭链腿部机构最大抬腿高度;
40.其中,1:第一滑块,2:第一连接杆,3:第二连接杆,4:第六连接杆,5:第三连接杆,6:第四连接杆,7:第二滑块,8:第五连接杆,9:第一滑动轨道,10:第二滑动轨道,11:第一电机,12:第二电机,13:足部,14:第三电机,15:机架,16:直线导轨,17:丝杆支撑座。
具体实施方式
41.下面结合具体实施例进一步说明本发明的技术方案。
42.实施例1
43.如图1所示,一种三驱动可调节闭链腿部机构,包括:第一滑动轨道9、第二滑动轨道10、第一连接杆2、第二连接杆3、第三连接杆5、第四连接杆6、第五连接杆8、第六连接杆4、第一滑块1和第二滑块7,第一滑块1安装在第一滑动轨道9上且能够沿该第一滑动轨道9滑动,第二滑块7安装在第二滑动轨道10上且能够沿该第二滑动轨道10滑动,第一滑块1的一端与第二滑动轨道10的上端铰接且铰接点为a点,第一滑块1的另一端与第一连接杆2的上端铰接且铰接点为b点,a点和b点的连线与第一滑动轨道9的长度方向平行,第二连接杆3的上端与第一连接杆2的下端铰接且铰接点为c点,第三连接杆5的上端和第四连接杆6的下端固装且均与第二滑块7铰接且铰接点为e点,第三连接杆5的下端与第六连接杆4的下端固装且连接点为d点,d点铰接在第二连接杆3上,第四连接杆6的上端和第六连接杆4的上端固装且连接点为f点,f点与第五连接杆8的下端铰接,在第一滑动轨道9上设置有o点,o点靠近a点且远离b点,一旋转轴从o点伸出并与第五连接杆8的上端固装,以使第五连接杆8能够绕o点旋转;
44.第二连接杆3下端安装有足部13(图1中未示出),且安装足部13处为p点。
45.实施例2
46.在实施例1的基础上,a点和b点之间的距离为80mm~90mm。
47.b点和c点之间的距离为410mm~420mm。
48.c点和d点之间的距离为250mm~270mm。
49.d点和e点之间的距离为310mm~330mm。
50.e点和f点之间的距离为160mm~180mm。
51.o点和f点之间的距离为60mm~90mm。
52.d点和f点之间的距离为480mm~490mm。
53.d点和p点之间的距离为370mm~380mm。
54.a点和e点之间的距离最大为100mm~350mm。
55.a点和o点之间的距离最大为170mm~430mm。
56.实施例3
57.如图2a和2b所示,在实施例1的基础上,第一滑动轨道9为第一滚珠丝杠的螺杆,第一滑块1为第一滚珠丝杠的滚珠螺母,还包括与第一滚珠丝杠的螺杆轴接的第一电机11(伺服电机),用于驱动第一滑块1在第一滑动轨道9上滑动。
58.第二滑动轨道10为第二滚珠丝杠的螺杆,第二滑块7为第二滚珠丝杠的滚珠螺母,还包括与第二滚珠丝杠的螺杆轴接的第二电机12(伺服电机),用于驱动第二滑块7在第二滑动轨道10上滑动。第二电机12固装在第二电机座内,第二电机座铰接在第一滑块1上,即第二电机座和第一滑块1的铰接点为a点。
59.旋转轴与第三电机14轴接,用于驱动第五连接杆8绕o点旋转。
60.实施例4
61.在实施例3的基础上,还包括机架,第一滚珠丝杠安装在机架15上,第三电机安装在机架上,旋转轴通过联轴器与第三电机14连接,第一滚珠丝杠两侧的机架上设置有直线
导轨16,在第一滚珠丝杠的滚珠螺母外安装有螺母座,螺母座能够随着滚珠螺母在第一滚珠丝杠的螺杆上滑动,螺母座与直线导轨相对的位置形成有直线凹槽,滚珠螺母在第一滚珠丝杠的螺杆上滑动时,螺母座也随着第一滚珠丝杠的滚珠螺母在直线导轨滑动。
62.第一电机11安装在第一电机座内,第一电机座固装在机架上。第一滚珠丝杠的螺杆远离第一电机11的一端安装在丝杆支撑座17内并且能够在丝杆支撑座内转动,丝杆支撑座固装在机架上。
63.第六连接杆4、第三连接杆5和第四连接杆6所围成的三角形可以是一个三角板,第六连接杆4、第三连接杆5和第四连接杆6分别为三角板的三个边。或者第六连接杆4、第三连接杆5和第四连接杆6是一个由第六连接杆4、第三连接杆5和第四连接杆6作为边围成的三角形框架。
64.第二滚珠丝杠的螺杆远离第二电机的一端安装有一限位块,用于限制第二滑块在第二滚珠丝杠的螺杆上滑动的距离范围。
65.三驱动可调节闭链腿部机构可以通过将机架固定在机器人基体上。
66.本发明的原理:三驱动可调节闭链腿部机构在不同场景下第一电机、第二电机和第三电机进行相应的工作。
67.第一工作模式:当机器人按照给定步长进行慢速行走时,第一电机和第二电机调整好a点和e点之间的距离以及a点和o点之间的距离后停止工作,在行走过程中,第三电机进行工作,第一电机和第二电机不工作,即在机器人行走过程中只有第三电机带动第五连接杆8(曲柄)旋转,在行走之前通过已知步长得到第一滑块和第二滑块在滑轨上的位置;
68.第二工作模式:在运动之前第一电机调节到相应位置后停止工作,第三电机工作带动第五连接杆8整周旋转,第二电机工作配合第三电机协同运动控制,最终实现特定的足部轨迹输出。即在三驱动可调节闭链腿部机构行走时,第二电机和第三电机同时工作。
69.以步长280mm为例,第一工作模式:将三驱动可调节闭链腿部机构的尺寸关系代入函数关系,
70.b=-3.398
×
10-5
a3+0.02597a
2-7.037a+955
71.其中b代表步长,a代表e点和a点之间的距离。通过函数关系求解出e点和a点之间的距离为270mm,进而通过ae和ao之间的长度关系相差为80mm获得a点和o点之间的距离为350mm。第一工作模式下,第一滑块和第二滑块位置确定后位置不变,第三电机开始工作腿部进行运动。第二工作模式下,如下述表3可知在步长280mm在263mm-284mm之间,所对应的ao距离为380mm,因此第一电机将a点和o点之间的距离设定为380mm保持不变,ae长度范围可调节为300mm-330mm,第二电机和第三电机在腿式机器人行走过程种协同运动,输出特定轨迹包括特定形状轨迹、步长和抬腿高度。
72.三驱动可调节闭链腿部机构采用三自由度的多驱动方式,其中第三电机为单向旋转的电机,提供整体三驱动可调节闭链腿部机构的主要动力,能够实现足部摆动。第一电机改变第一滑块在第一滑动轨道的位置,能改变行走轨迹步长范围,满足实现期望轨迹的前提条件。第二电机为三驱动可调节闭链腿部机构提供柔顺调节,在第一工作模式中与第一电机协同控制步长,在第二工作模式中除了与第一电机协同控制步长外还要配合第三电机在行走过程中改变行走轨迹的高度,实现足部期望轨迹稳定输出,第五连接杆8由第三电机进行驱动,进行单相连续旋转,实现足部轨迹的连续整周轨迹输出,实现足部行走轨迹。第
二电机进行往复高频调节,通过与第三电机协同控制减小足部对地面的冲击力。
73.第一闭环四杆机构:为aofe所围成的四边形。
74.通过运动学模型计算可知,第一闭环四杆机构为曲柄摇杆机构具有急回特性,该特性对足部占空比有影响,因此修改第一闭环四杆机构尺寸从而改变极位夹角使足部占空比发生变化。根据上述已知可变化的杆件长度,调节a点-e点的距离和a点-o点的距离都能改变极位夹角,考虑结构整体尺寸的要求,对于a点-o点的距离和a点-e点的距离在合适的范围内进行相应的选择,因此对a点-o点的距离和a点-e点的距离对足部占空比影响的实验。结果如表1所示(支撑相曲柄所占角度:第五连接杆8旋转角度范围大小对应足部经过支撑相部分):
75.表1
[0076][0077]
表1中:a点和b点之间的距离为88.44mm。b点和c点之间的距离为417.42mm。c点和d点之间的距离为260mm。d点和e点之间的距离为323.53mm。e点和f点之间的距离为174.32mm。o点和f点之间的距离为80mm。d点和f点之间的距离为487.42mm。d点和p点之间的距离为377.42mm。
[0078]
通过上述表1可知极位夹角的大小与占空比有关,当极位夹角越大时,支撑相曲柄所占角度越小,占空比也越小。上述序号1和2实验,a点-o点的距离长度不变,为了满足杆长条件和输出轨迹曲线的要求,a点-e点的距离可调节的范围在290mm-330mm之间,在该区间内极位夹角依次递减,支撑相曲柄所占角度依次增加,占空比对应增加。上述序号3和4实验,a点-e点的距离长度不变,为了满足杆长条件和输出轨迹曲线的要求,a点-o点的距离可调节的范围在300mm-390mm之间,在该区间内极位夹角依次递增,支撑相曲柄所占角度依次递减,占空比对应递减。
[0079]
从序号1和2以及序号3和4两组实验中得知,a点-o点的距离和a点-e点的距离在相应的范围内变化时,a点-o点的距离和a点-e点的距离对占空比大小也近似相同,所以a点-o点的距离和a点-e点的距离调节对占空比影响效果相同。a点-o点的距离长度变化也会导致步长的变化,为了使变步长和变占空比不发生耦合,也不引入其他杆调节的前提下,最终选择调节a点-e点的距离改变占空比。如图6a(表1中序号1)、6b(表1中序号2)所示,将a点-e点的距离长度设置为290mm和330mm,第五连接杆8旋转一周所对应的足部轨迹曲线(足部轨迹以p点的轨迹为依据)。
[0080]
根据a点-o点的距离和a点-e点的距离调节占空比,优点在于第三电机不需要改变速度,通过急回特性可以改变两相的速度。但是,由于第一滑块和第二滑块位置确定,在行走过程中各杆件尺寸固定,只有第三电机带动第五连接杆8旋转,步态轨迹固定。
[0081]
变步长对于足式机器人适应复杂环境是必不可少的,步长变化使机器人能实现跨沟,目标点逼近功能。通过运动学模型观察各杆件尺寸的变化对足部轨迹的影响,发现a点-e点的距离和a点-o点的距离长度对步距长的变化影响较大。通过实验对比两杆对步距长的影响。将a点-e点的距离进行固定,每取a点-e点的距离长度找到a点-o点的距离的可调范围,观察a点-o点的距离变化对步长的影响。同理,每取a点-o点的距离长度找到a点-e点的距离的可调范围,观察a点-e点的距离变化对步长的影响。当a点-e点的距离固定时,a点-o点的距离是依据应同时满足两个条件,一是要满足杆长条件,二是足部输出轨迹要满足行走轨迹要求。如表2所示:
[0082]
表2
[0083][0084]
表3
[0085][0086]
ae:a点-e点的距离,ao:a点-o点的距离。
[0087]
表2、3中:a点和b点之间的距离为88.44mm。b点和c点之间的距离为417.42mm。c点和d点之间的距离为260mm。d点和e点之间的距离为323.53mm。e点和f点之间的距离为174.32mm。o点和f点之间的距离为80mm。d点和f点之间的距离为487.42mm。d点和p点之间的距离为377.42mm。
[0088]
通过上表2、3得知,当ae或ao中的一个固定时,另一个在可调范围内得出步长范围大小,若仅仅通过调节ae和ao其中一个,对于步长的大小和范围都是受限的,一个长度固定后,步长的范围也确定了,从表2和3中可知,ae和ao没有一个长度固定后通过另一个调节能
够最大限度包含表2、3的步长范围总和,因此仅仅调节ae和ao其中一个长度,使步长大幅度变化是不可行的。
[0089]
由此可知,在调节步长时,需要ae和ao同时调节,这样才会使步长范围更大,由表2和3可知,步长范围为298mm(536-238=298mm)。若想要在步长变化的同时,足部输出轨迹要满足期望要求,要选择ae和ao合适的尺寸。通过多次试验可知,当ae或ao中的一个固定时,另一个在可调范围内的极限位置处输出足部轨迹曲线更能符合轨迹要求。当a点和o点之间的距离大于a点和e点之间的距离为75mm-85mm时,足部输出轨迹曲线效果最好。
[0090]
当a点-o点的距离与a点-e点的距离同时减小时,步长在随之变大。
[0091]
当三驱动可调节闭链腿部机构:a点和b点之间的距离为88.44mm。b点和c点之间的距离为417.42mm。c点和d点之间的距离为260mm。d点和e点之间的距离为323.53mm。e点和f点之间的距离为174.264mm。o点和f点之间的距离为80mm。d点和f点之间的距离为487.121mm。d点和p点之间的距离为377.42mm。a点和e点之间的距离为350mm。a点和o点之间的距离为430mm。第三电机驱动第五连接杆8旋转一周,此时为最小步长为238mm;在上述条件下,当将a点-e点之间的距离调整至为100mm,a点-o点的距离调整至为170mm时,此时为最大步长为536mm。在最大步长时三驱动可调节闭链腿部机构第五连接杆旋转一周p点轨迹的分布图如图7a所示,在最小步长时三驱动可调节闭链腿部机构第五连接杆旋转一周p点轨迹的分布图如图7b所示。
[0092]
从表2和表3可知,当ae和ao固定一杆长度,步长范围最大为94mm,因此ae和ao同时调节,可选择步长范围变大。
[0093]
足式机器人在面对障碍环境需要跨越时,对三驱动可调节闭链腿部机构的抬腿高度提出要求,抬腿高度是机器人行走的重要指标。在已知机构尺寸中,将传递杆从直杆改为三角杆,通过调节a点-e点的距离大小来扩大抬腿高度范围,如表4所示。
[0094]
表4
[0095][0096]
表4中三角形的三驱动可调节闭链腿部机构的a点和b点之间的距离为88.44mm。b点和c点之间的距离为417.42mm。c点和d点之间的距离为260mm。d点和e点之间的距离为323.53mm。e点和f点之间的距离为174.264mm。o点和f点之间的距离为80mm。d点和f点之间的距离为487.121mm。d点和p点之间的距离为377.42mm。a点和o点之间的距离是250mm。
[0097]
直线型的三驱动可调节闭链腿部机构与三角型的三驱动可调节闭链腿部机构基本一致,不同之处仅在于:去掉三角形的三驱动可调节闭链腿部机构第三连接杆5和第四连接杆6,将第二滑块7铰接在第六连接杆4上。
[0098]
由上表4可知,实验计算得到,三角型的三驱动可调节闭链腿部机构抬腿高度范围
更大,最低高度为286.8mm,最大高度在623.8mm,它能够适应更多的障碍高度,说明本发明三驱动可调节闭链腿部机构对环境适应性更好。
[0099]
如图8a、8b所示,直线型的三驱动可调节闭链腿部机构的抬腿高度最小为401.3mm,抬腿高度最大为617.8mm。从能量效率角度看,抬腿高度大不利于无障碍条件下行走。如图8c、8d所示,三角型的三驱动可调节闭链腿部机构的抬腿高度最小为286.8mm,最大为623.8mm,相比于直线型的三驱动可调节闭链腿部机构最小的抬腿高度,能够在无障碍下效率更高,而且直线型的三驱动可调节闭链腿部机构抬腿高度范围大小为216.5mm,三角型的三驱动可调节闭链腿部机构抬腿高度范围为337mm,相比较越障范围更大,适应能力更好。
[0100]
本发明三驱动可调节闭链腿部机构解决了闭链腿部机构步态单一固定,不能大范围改变步长和步高的缺点,实现越障、跨沟、目标逼近功能。提高了对复杂地面环境的适应能力,而且突出了闭链腿部机构效率高,控制简单,运载能力强的特点。
[0101]
以上对本发明做了示例性的描述,应该说明的是,在不脱离本发明的核心的情况下,任何简单的变形、修改或者其他本领域技术人员能够不花费创造性劳动的等同替换均落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1