一种电动尾翼的控制机构和控制方法与流程
1.本发明涉及一种电动尾翼的控制机构和控制方法,属于汽车电动尾翼的技术领域。
背景技术:
2.通常,当车辆在道路上以高速行驶时,会产生作为与车辆的速度和面积成比例的阻力的拖拽力,并且通过从车身上流过的空气而在车辆上产生升力,从而使车辆得到提升。
3.车辆的顶部是弯曲的,而底部是平坦的。因此,从车辆的顶部上方流过的空气速度大于从底部下方流过的空气速度,从而在车辆的顶部与底部之间产生压力差,由此向车辆施加升力。
4.为了解决这个问题,现有技术中,在货车或运动型多用途车(suv)的车顶板或后栏板上安装有后扰流板。有些安装的是固定式尾翼,有些安装的是电动式尾翼。而市场上的电动式尾翼有些只能打开或者闭合,不能适应不同车速的角度需求。
5.实际生产中,由于零件批量生产过程中存在尺寸公差,所以电动尾翼在装配完成后,需要根据实际的零件尺寸,找到预设的打开位置。
技术实现要素:
6.为了解决上述技术问题,本发明提供一种电动尾翼的控制机构和控制方法,其具体技术方案如下:一种电动尾翼的控制机构,包括动力装置、扰流板、基座,所述动力装置设置在基座上,所述动力装置的两端分别连接执行机构,所述扰流板与两个执行机构连接,动力装置带动执行机构伸展和缩回,执行机构带动扰流板发生位置变化;还包括ecu,所述动力装置包括电机组件、传感器和信号释放装置,所述信号释放装置设置在电机组件的输出轴表面,所述传感器固定设置在于输出轴之外的地方,传感器正对着信号释放装置,所述传感器与信号释放装置配合采集到输出轴的位置信号,并将采集到的位置信号传递给ecu,所述ecu与电机组件内的电机信号采集板连接,获得电机正反转的信号和电机的转动圈数,并控制电机的启动或停止。
7.进一步的,所述执行机构包括驱动杆和连杆机构,所述驱动杆连接有驱动轴;所述驱动杆设置有驱动杆第一配合面和驱动杆第二配合面。
8.进一步的,所述执行机构还包括连杆底座,连杆底座包含当连杆底座第一配合面和连杆底座第二配合面;执行机构伸展到最大位置时,连杆底座第一配合面和驱动杆第一配合面接触;当执行机构伸展到最小位置时,连杆底座第二配合面和驱动杆第二配合面接触。
9.进一步的,所述连杆底座朝向驱动杆弯折形成折板,折板的厚度面为连杆底座第一配合面,朝向驱动杆的一面为连杆底座第二配合面。
10.进一步的,电机组件包括电机、电机信号采集板和输出轴。
11.进一步的,所述ecu单独设置或者与电机信号采集板集成,或者与车身的其他ecu集成。
12.进一步的,所述电机组件还包括减速组件。
13.进一步的,所述基座靠近两端位置内凹形成凹槽,所述执行机构还包括连杆底座,所述连杆底座固定在凹槽内侧底部,所述驱动轴穿过凹槽,连杆底座和驱动杆。
14.进一步的,所述基座靠近两端位置内凹形成凹槽,所述执行机构还包括连杆底座,所述连杆底座固定在凹槽内侧底部,所述驱动轴穿过凹槽、连杆底座和驱动杆。
15.一种电动尾翼的控制方法,包括以下步骤:确定扰流板打开的最大位置pmax和最小位置pmin:ecu控制电机沿某一个方向转动,假定为向使扰流板关闭的方向转动,当输出轴转动到某个特定的角度,传感器采集到信号释放装置的信号,然后传递一个信号给ecu,ecu会识别该位置为p传感器,然后通过电机信号采集板开始记录电机转动圈数,继续沿同样方向转动,直到驱动杆第二配合面接触连杆底座第二配合面,这时传动系统发生堵转,电流会增大,电机转速会下降为零,ecu识别到电流增大或者电机转速下降为零后,识别该位置为p下止点,停止转动并记录电机转动的圈数n;然后,ecu控制电机向使导流板打开的方向转动,直到再次探测到传感器变化信号,即p传感器位置,然后ecu开始通过电机信号采集板记录电机转动圈数,继续沿同样方向转动,直到驱动杆第一配合面接触连杆底座第一配合面,这时传动系统发生堵转,电流会增大,电机转速会下降为零,ecu识别到电流增大或者电机转速下降为零后,识别该位置为p
上止点
,停止转动并记录电机转动的圈数n;ecu的程序中预设置了n1和n2两个电机转动圈数值,在获得n1和n2后,ecu会与n1和n2对比,如果n1大于n1,n2大于n2,则认为无误,首次运行成功;然后将从p传感器位置起,电机延扰流板关闭的方向转动n1圈的位置识别为pmin,电机延扰流板打开的方向转动n2圈的位置识别为pmax;如果n1不大于n1,或者n2不大于n2,则会报错。
16.进一步的,该方法还可以精确的运行到预定的位置p
预设
将p传感器设置的靠近pmin,而预定的位置p
预设
在p传感器和pmax之间,然后在ecu的程序中,设置好p传感器到p
预设
对应的电机运行圈数n预设,所以每次在电动尾翼打开的时候,ecu都以探测到p传感器位置为基准,电机转动设置好的圈数n预设,到达p
预设
目标位置。
17.进一步的,在pmin位置时扰流板为关闭状态;在pmax位置时扰流板为最大打开位置;预定的位置p
预设
为多个。
18.本发明使用时的运行状态为:1.当扰流板处于关闭状态时,ecu接收到整车控制器的指令,需把扰流板打开到pmax位置,ecu控制电机朝打开扰流板的方向转动,转动的过程中输出轴也会带着信号释放装置转动,当信号释放装置转动到p传感器时,会触发传感器,传感器传递一个信号给ecu,然后ecu开始通过电机信号采集板记录电机转动的圈数,当转动到预设置的n2圈数时电机停止,即达到pmax位置;2.当扰流板处于关闭状态时,ecu接收到整车控制器的指令,需把扰流板打开到p
预设
的位置,ecu控制电机朝打开扰流板的方向转动,转动的过程中输出轴也会带着信号释放装置转动,当信号释放装置转动到p传感器时,会触发传感器,传感器传递一个信号给
ecu,然后ecu开始通过电机信号采集板数电机转动的圈数,当转动到预设置的圈数能时电机停止,即达到p
预设
位置;3.当扰流板处于pmax或者p
预设
的位置时,ecu接收到整车控制器的指令,需把扰流板关闭即到达pmin位置,ecu控制电机朝关闭扰流板的方向转动,转动的过程中输出轴也会带着信号释放装置转动,当信号释放装置转动到p传感器时,会触发传感器,传感器传递一个信号给ecu,然后ecu开始通过电机信号采集板数电机转动的圈数,当转动到预设置的n1圈数时电机停止,即达到pmin位置;本发明的有益效果是:本发明利用转轴传感器控制电动尾翼扰流板展开不同角度的方法,可以精准的把电动尾翼扰流板打开到多个角度,以适应不同的车速和不同的模式。
附图说明
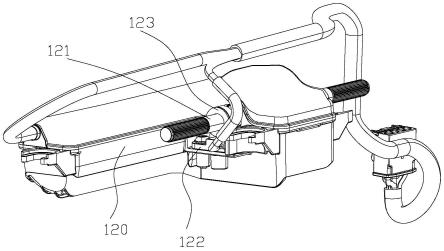
19.图1是本发明的装配在汽车尾部的示意图,图2是本发明的基座和扰流板的连接示意图,图3是图2的局部剖开的示意图,图4是本发明的执行机构的示意图,图5是本发明的执行机构的剖面图,图6是本发明电机组件的示意图,图7是本发明的传感器和信号释放装置的装配位置示意图,图8是本发明的执行机构与驱动轴的连接状态图,图9是驱动杆的结构示意图,图10是本发明ecu的控制关系图,图11是本发明的扰流板的位置示意图,图中:1—扰流板,2—连接座,3—基座,4—加强板,5—第二安装板,6—凹槽,7—执行机构,71—连杆底座, 711—连杆底座第一配合面,712—连杆底座第二配合面,72—第一连杆, 74—第二连杆,75—第三连杆,76—第四连杆, 78—驱动杆,781—驱动杆第一配合面,782—驱动杆第二配合面,79—折板, 711—第五连杆,8—扰流板安装支架,9—驱动轴,10—第一安装板,11—集水盒,12—动力装置,120—电机组件,121—输出轴,122—传感器,123—信号释放装置,124—电机信号采集板,125—减速组件,13—ecu。
具体实施方式
20.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
21.如图1所示,本发明的电动尾翼的控制机构具体应用于汽车尾部,用于控制尾翼(扰流板1)的升降,本发明包括动力装置12、扰流板1、ecu13、基座3,动力装置12设置在基座3下方,动力装置12的两端分别连接执行机构7,扰流板1与两个执行机构7连接,动力装置12带动执行机构7变形,执行机构7带动扰流板1发生位置变化;动力装置12包括电机组件120、传感器122和信号释放装置123,信号释放装置123设置在电机组件120的输出轴121表面,传感器122设置在电机组件120的机壳上,参见图6-8,传感器122正对着信号释放装置123,传
感器122与信号释放装置123配合采集到输出轴121的位置信号,参见图10,并将采集到的位置信号传递给ecu13,ecu13与电机组件120内的电机通信连接,获得电机正反转的信号并控制电机的转动圈数。
22.参见图1-3,基座3横跨在车身尾部,基座3设置在第一安装板10上,第一安装板10固定在车身尾部。
23.基座3下方设置有两个对称的加强板4,加强板4一面与基座3连接,一面与车身尾部连接,一面与第二安装板5连接,第二安装板5横跨车身尾部固定。
24.参见图6,动力装置12设置在基座3中部,电机组件120包括电机和减速箱,电机的输出端通过减速箱连接两个朝向两侧的输出轴121;参见图8,执行机构7包括驱动杆78和连杆变形机构,驱动杆18为异构凸轮机构,驱动杆18连接有驱动轴9;驱动轴9与输出轴121同轴连接。
25.参见图9,驱动杆78的凸出部分为沿着驱动杆78的中心线对称结构,对称部分为朝向中心线外侧伸出的驱动杆第一配合面781和驱动杆第二配合面782。
26.参见图2,4-5,基座3靠近两端位置内凹形成凹槽6,执行机构7还包括连杆底座71,连杆底座71固定在凹槽6内侧底部,驱动轴9穿过凹槽6、连杆底座71和驱动杆78, 连杆底座71朝向驱动杆78弯折形成折板79,折板79的厚度面为连杆底座第一配合面711,朝向驱动杆78的一面为连杆底座第一配合面712。
27.下面给出执行机构的一个具体实施例,参见图4-6,执行机构7的变形原理为:执行机构7包括两个交叉的平行四边形结构,两个平行四边形交叉部分,有一根第四连杆76同时作为两个平行四边形的一个边,且在位于下面一个平行四边形的边上连接第五连杆711,第五连杆711的下端凸轮78的一端连接,动力轴9穿过凸轮78的另一端。
28.扰流板1的底部设置有两个连接座2,执行机构7的顶部设置有l形转角的扰流板安装支架8,扰流板安装支架8包围贴合在连接座2的两面,且螺栓固定拧紧连接。
29.执行机构7的具体结构为:执行机构7还包括连杆底座71、第一连杆72、第二连杆74、第三连杆75和第四连杆76,连杆底座71的底面与凹槽6内部底面贴合,并通过螺栓拧紧固定,连杆底座71底面的两侧设置有与其垂直的向上延伸的侧板,动力轴9穿到凹槽6内部,并同时穿过连杆底座71的两个侧板, 凸轮78位于两个侧板之间,靠近朝向中部的一个侧板;第一连杆72的下端与连杆底座71的朝向外部的侧板靠近下端位置连接,第一连杆72的上端与第二连杆74的下端连接,第二连杆74的上端与扰流板安装支架8的外侧面连接;第四连杆76的下端与连杆底座71的朝向外部的侧板靠近上端位置连接,第四连杆76的上端与第三连杆75的下端连接,第三连杆75的上端与扰流板安装支架8的外侧面连接,第四连杆76的中部与第二连杆74交叉,并在交叉处通过铆钉贯穿连接。
30.第一连杆72、第四连杆76和第二连杆74交叉处下方、以及第一连杆72和第四连杆76在连杆底座71上的连接处之间距离,形成了下方的平行四边形的四个边。
31.第三连杆75、第四连杆76和第二连杆74交叉处上方、以及第三连杆75和第二连杆74在扰流板安装支架8上的连接处之间距离,形成了上方的平行四边形的四个边。上方的平行四边形和下方的平行四边形构成一个交叉的两个平行四边形,能够实现竖向的变形。
32.第五连杆711的顶部连接第四连杆76中下部,且连接点位于第四连杆76和第二连杆74交叉处的下方。凸轮旋转拉着第五连杆711的下端的高度位置变化,进而第五连杆711的上端高度变化,进而拉着第四连杆76的位置变化,进而带动两个平行四边形变形,进而实现顶部的扰流板安装支架8高度变化,以及可以实现一定角度的变化。
33.凹槽6的底部开设有出水口,出水口对接设置有集水盒11,集水盒11的底部通过导水管连接引出车身。车身尾部的水通过凹槽引流到集水盒11,进而从集水盒11底部的导水管排出。
34.一种电动尾翼的控制方法,该方法可以确定扰流板打开的最大位置pmax和最小位置pmin:ecu控制电机沿某一个方向转动,假定为向使扰流板关闭的方向转动,当输出轴转动到某个特定的角度,传感器采集到信号释放装置的信号,然后传递一个信号给ecu,ecu会识别该位置为p传感器,然后通过电机信号采集板开始记录电机转动圈数,继续沿同样方向转动,直到驱动杆第二配合面782接触连杆底座第二配合面712,这时传动系统发生堵转,电流会增大,电机转速会下降为零,ecu识别到电流增大或者电机转速下降为零后,识别该位置为p
下止点
,停止转动并记录电机转动的圈数n1;然后,ecu控制电机向使导流板打开的方向转动,直到再次探测到传感器变化信号,即p传感器位置,然后ecu开始通过电机信号采集板记录电机转动圈数,继续沿同样方向转动,直到驱动杆第一配合面781接触连杆底座第一配合面711,这时传动系统发生堵转,电流会增大,电机转速会下降为零,ecu识别到电流增大或者电机转速下降为零后,识别该位置为p
上止点
,停止转动并记录电机转动的圈数n2;ecu的程序中预设置了n1和n2两个电机转动圈数值,在获得n1和n2后,ecu会与n1和n2对比,如果n1大于n1,n2大于n2,则认为无误,首次运行成功;然后将从p传感器位置起,电机延扰流板关闭的方向转动n1圈的位置识别为pmin,电机延扰流板打开的方向转动n2圈的位置识别为pmax;如果n1不大于n1,或者n2不大于n2,则会报错。
35.根据电动尾翼的控制方法,该方法还可以精确的运行到预定的位置p预设。
36.将p传感器设置的靠近pmin,而预定的位置p
预设
在p传感器和pmax之间,然后在ecu的程序中,设置好p传感器到p
预设
对应的电机运行圈数n预设,所以每次在电动尾翼打开的时候,ecu都以探测到p传感器位置为基准,电机转动设置好的圈数n预设,到达p
预设
目标位置。
37.根据权利要求11所述的电动尾翼的控制方法,在pmin位置时扰流板为关闭状态;在pmax位置时扰流板为最大打开位置;预定的位置p
预设
为多个。
38.上述传感器122优选霍尔传感器,信号释放装置123优选磁环。
39.电动尾翼的控制方法,具体包括以下步骤:(1). 确定扰流板打开的最大位置pmax和最小位置pmin,ecu控制电机沿某一个方向转动,假定为向使扰流板关闭的方向转动,当输出轴转动到某个特定的角度,传感器采集到信号释放装置的信号,然后传递一个信号给ecu,ecu会识别该位置为p传感器,然后开始计算电机转动圈数,继续沿同样方向转动,直到驱动杆第二配合面接触连杆底座第二配合面,这时传动系统发生堵转,电流会增大,电机转速会下降为零,ecu识别到电流增大或者电机转速下降为零后,识别该位置为p
下止点
,停止转动并记录电机转动的圈数n1;
然后,ecu控制电机向使导流板打开的方向转动,直到再次探测到传感器变化信号,即p传感器位置,然后开始计算电机转动圈数,继续沿同样方向转动,直到驱动杆第一配合面接触连杆底座第一配合面(711),这时传动系统发生堵转,电流会增大,电机转速会下降为零,ecu识别到电流增大或者电机转速下降为零后,识别该位置为p
上止点
,停止转动并记录电机转动的圈数n2;ecu的程序中预设置了n1和n2两个电机转动圈数值,在获得n1和n2后,ecu会与n1和n2对比,如果n1大于n1,n2大于n2,则认为无误,首次运行成功;然后将从p传感器位置起,电机延扰流板关闭的方向转动n1圈的位置识别为pmin,电机延扰流板打开的方向转动n2圈的位置识别为pmax;如果n1不大于n1,或者n2不大于n2,则会报错。
40.(2). 精确的运行到预定的位置p
预设
将p传感器设置的靠近pmin,而预定的位置p
预设
在p传感器和pmax之间,然后在ecu的程序中,设置好p传感器到p
预设
对应的电机运行圈数n预设,所以每次在电动尾翼打开的时候,ecu都以探测到p传感器位置为基准,电机转动设置好的圈数n预设,到达p
预设
目标位置。
41.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1