一种能适应复杂环境的越障机器人
1.本发明涉及机器人技术领域,具体涉及一种能适应复杂环境的越障机器人。
背景技术:
2.随着科技的高速发展,移动机器人正在改变这我们的运输行业。在无人驾驶、智能化工厂、室外探索等领域都能看见移动机器人的身影。目前市面上大多数移动机器人的底盘较为单一,底盘体积较大、灵活度不高,通常为一种轮系的组合,所以其环境适应能力较低,无法满足复杂多变环境的工作要求,工作效率不高。
技术实现要素:
3.本发明的目的在于针对现有技术的不足之处,提供一种能适应复杂环境的越障机器人,包括履带行走攀爬模块,履带行走攀爬模块包括两个履带行走攀爬模块支撑侧梁、两个履带行走攀爬模块支撑横梁和四个攀爬部件,两个履带行走攀爬模块支撑横梁与两个履带行走攀爬模块支撑侧梁固定连接形成矩形框架,四个攀爬部件都安装在矩形框架上,每一个攀爬部件都攀爬式驱动电机、传动轴、履带支撑内侧板、履带、履带支撑轮主轴、履带支撑外侧板、履带旋转传动小齿轮、履带行走式驱动电机、履带旋转传动大齿轮、防滑齿、履带支撑轮和履带支撑轮传动同步带;攀爬式驱动电机固定安装在履带行走攀爬模块支撑横梁上,传动轴同轴连接攀爬式驱动电机的主轴,履带支撑内侧板固定安装在传动轴上,履带行走式驱动电机的一端固定安装在履带支撑内侧板上,履带行走式驱动电机的另一端固定连接履带支撑外侧板,履带行走式驱动电机的转轴穿过履带支撑外侧板;履带支撑内侧板和履带支撑外侧板都具有三个等角度间隔设置的外支板,每两个相对设置的外支板之间固定连接两个履带支撑轮主轴,每个履带支撑轮主轴上固定安装一个履带支撑轮,每个履带支撑轮上固定安装防滑齿,履带啮合在防滑齿上,每两个相对设置的外支板之间的履带支撑轮上安装有履带支撑轮传动同步带;履带旋转传动大齿轮位于履带支撑外侧板外部且与履带行走式驱动电机的转轴固定连接,履带旋转传动小齿轮固定连接履带支撑轮主轴,履带旋转传动大齿轮和履带旋转传动小齿轮相啮合。
4.可选的,能适应复杂环境的越障机器人还包括交替式行走及横向移动模块,交替式行走及横向移动模块包括八个摇杆、四个同步运动传动轴、第一摇杆动力传输皮带、电机端摇杆主动力传输皮带、摇杆动力传输电机、第二摇杆动力传输皮带和四个横向行走模块,八个摇杆均分成两组分别安装在两个履带行走攀爬模块支撑侧梁上,每两个相对的摇杆之间连接一个同步运动传动轴,两个横向行走模块并排固定在两个相邻的同步运动传动轴上,另外两个横向行走模块并排固定在另外两个相邻的同步运动传动轴上,摇杆动力传输电机固定于履带行走攀爬模块支撑侧梁,电机端摇杆主动力传输皮带绕设在摇杆动力传输电机和靠近摇杆动力传输电机的摇杆上,第一摇杆动力传输皮带绕设在中间两个摇杆上,第二摇杆动力传输皮带饶设在远离摇杆动力传输电机的两个摇杆上。
5.可选的,交替式行走及横向移动模块还包括陀螺仪、避震弹簧、陀螺仪模块底座,
陀螺仪通过多个避震弹簧固定连接陀螺仪模块底座,陀螺仪模块底座固定在两个相邻的同步运动传动轴上且位于两个并排布置的横向行走模块之间。
6.可选的,横向行走模块包括梯形支撑外壳、涡轮风扇外壳、涡轮风扇、涡轮风扇保护罩、光轴支撑座、光轴、高强度联轴器、全向轮、全向轮驱动电机、涡轮风扇驱动电机支架和涡轮风扇驱动电机,梯形支撑外壳转动连接摇杆,涡轮风扇外壳固定安装在梯形支撑外壳上,涡轮风扇保护罩固定安装在涡轮风扇外壳上,涡轮风扇驱动电机支架固定安装在涡轮风扇外壳内部,涡轮风扇驱动电机固定安装在涡轮风扇驱动电机支架上,全向轮驱动电机固定安装在梯形支撑外壳底部,光轴支撑座固定安装在梯形支撑外壳底部,光轴转动安装在光轴支撑座上,光轴固定连接全向轮驱动电机的主轴,高强度联轴器套设在光轴上,全向轮固定安装在高强度联轴器外部。
7.可选的,能适应复杂环境的越障机器人还包括双旋翼横列式飞行模块,双旋翼横列式飞行模块包括螺旋桨支撑横梁、舵机支撑座、舵机联轴器、无刷电机支架支撑座、无刷电机支架支撑轴、轴承、无刷电机支架、大功率无刷电机、螺旋桨、舵机和无刷电机驱动器,螺旋桨支撑横梁固定安装在履带行走攀爬模块支撑侧梁的外侧,舵机支撑座和无刷电机支架支撑座固定安装在螺旋桨支撑横梁上,舵机固定安装在舵机支撑座上,无刷电机驱动器固定安装在舵机上,舵机联轴器固定安装在舵机主轴上,轴承的外圈固定安装在无刷电机支架支撑座上,无刷电机支架支撑轴固定安装在轴承的内圈上,无刷电机支架支撑轴与舵机联轴器相连接,无刷电机支架固定安装在无刷电机支架支撑轴上,大功率无刷电机固定安装在无刷电机支架上,螺旋桨固定安装在大功率无刷电机主轴上。
8.可选的,双旋翼横列式飞行模块有两个,两个双旋翼横列式飞行模块分别固定安装在两个履带行走攀爬模块支撑侧梁的外侧。
9.与现有技术相比,本发明的有益效果为:
10.1、当机器人仅执行平面移动任务时,一个履带行走式驱动电机能够带动三段履带进行旋转,四个履带行走式驱动电机工作即可实现前进、后退及原地旋转功能,当遇到楼梯、石块等障碍物时,四个攀爬式驱动电机工作,分别带动履带支撑内侧板进行旋转,实现攀爬功能;
11.2、当机器人遇到颠簸路面或者松软路面的时候,履带行走攀爬模块停止工作,交替式行走及横向移动模块启动,摇杆动力传输电机工作,通过电机端摇杆主动力传输皮带将动力传递至摇杆上,通过第一摇杆动力传输皮带和第二摇杆动力传输皮带将动力进一步传递至各个摇杆上,摇杆的运转将带动四个梯形支撑外壳进行周期性交替运动,这个交替运动将带动移动机器人底盘前行,当机器人需要横向移动时,将梯形支撑外壳旋转至最低位,启动全向轮驱动电机带动全向轮运动即可,此时机器人的转向通过涡轮风扇工作提供动力;
12.3、当移动机器人想跨越大型障碍物的时候,可以启动两端的大功率无刷电机,带动移动机器人底盘进行飞行,同时舵机可以控制飞行方向。
附图说明
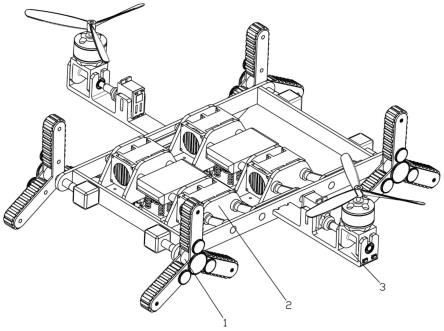
13.图1为本发明提供的能适应复杂环境的越障机器人的结构示意图;
14.图2为本发明提供的履带行走攀爬模块的结构示意图;
15.图3为本发明提供的履带行走攀爬模块的攀爬部件的结构示意图;
16.图4为本发明提供的履带行走攀爬模块的攀爬部件的内部结构示意图;
17.图5为本发明提供的交替式行走及横向移动模块一个方向上的结构示意图;
18.图6为本发明提供的交替式行走及横向移动模块另一个方向上的结构示意图;
19.图7为本发明提供的横向行走模块一个方向上的结构示意图;
20.图8为本发明提供的横向行走模块另一个方向上的结构示意图;
21.图9为本发明提供的双旋翼横列式飞行模块的结构示意图。
具体实施方式
22.下面将结合本发明实施例对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
24.下面结合具体实施例和附图对本发明作进一步说明,但不作为本发明的限定。
25.结合图1至图9所示,本发明的实施例公开的一种能适应复杂环境的越障机器人,包括履带行走攀爬模块1,履带行走攀爬模块1包括两个履带行走攀爬模块支撑侧梁101、两个履带行走攀爬模块支撑横梁102和四个攀爬部件,两个履带行走攀爬模块支撑横梁102与两个履带行走攀爬模块支撑侧梁101固定连接形成矩形框架,四个攀爬部件都安装在矩形框架上,每一个攀爬部件都攀爬式驱动电机103、传动轴104、履带支撑内侧板105、履带106、履带支撑轮主轴107、履带支撑外侧板108、履带旋转传动小齿轮109、履带行走式驱动电机110、履带旋转传动大齿轮111、防滑齿112、履带支撑轮113和履带支撑轮传动同步带114;攀爬式驱动电机103固定安装在履带行走攀爬模块支撑横梁102上,传动轴104同轴连接攀爬式驱动电机103的主轴,履带支撑内侧板105固定安装在传动轴104上,履带行走式驱动电机110的一端固定安装在履带支撑内侧板105上,履带行走式驱动电机110的另一端固定连接履带支撑外侧板108,履带行走式驱动电机110的转轴穿过履带支撑外侧板108;履带支撑内侧板105和履带支撑外侧板108都具有三个等角度间隔设置的外支板,每两个相对设置的外支板之间固定连接两个履带支撑轮113主轴107,每个履带支撑轮113主轴107上固定安装一个履带支撑轮113,每个履带支撑轮113上固定安装防滑齿112,履带106啮合在防滑齿112上,每两个相对设置的外支板之间的履带支撑轮113上安装有履带支撑轮传动同步带114;履带旋转传动大齿轮111位于履带支撑外侧板108外部且与履带行走式驱动电机110的转轴固定连接,履带旋转传动小齿轮109固定连接履带支撑轮113主轴107,履带旋转传动大齿轮111和履带旋转传动小齿轮109相啮合。当机器人仅执行平面移动任务时,一个履带行走式驱动电机110能够带动三段履带进行旋转,四个履带行走式驱动电机110工作即可实现前进、后退及原地旋转功能,当遇到楼梯、石块等障碍物时,四个攀爬式驱动电机103工作,分别带动履带支撑内侧板105进行旋转,实现攀爬功能。
26.进一步地,能适应复杂环境的越障机器人还包括交替式行走及横向移动模块2,交替式行走及横向移动模块2包括八个摇杆201、四个同步运动传动轴202、第一摇杆动力传输
皮带206、电机端摇杆主动力传输皮带207、摇杆动力传输电机208、第二摇杆动力传输皮带209和四个横向行走模块,八个摇杆201均分成两组分别安装在两个履带行走攀爬模块支撑侧梁101上,每两个相对的摇杆201之间连接一个同步运动传动轴202,两个横向行走模块并排固定在两个相邻的同步运动传动轴202上,另外两个横向行走模块并排固定在另外两个相邻的同步运动传动轴202上,摇杆动力传输电机208固定于履带行走攀爬模块支撑侧梁101,电机端摇杆主动力传输皮带207绕设在摇杆动力传输电机208和靠近摇杆动力传输电机208的摇杆201上,第一摇杆动力传输皮带206绕设在中间两个摇杆201上,第二摇杆动力传输皮带209饶设在远离摇杆动力传输电机208的两个摇杆201上。
27.进一步地,交替式行走及横向移动模块2还包括陀螺仪203、避震弹簧204、陀螺仪模块底座205,陀螺仪203通过多个避震弹簧204固定连接陀螺仪模块底座205,陀螺仪模块底座205固定在两个相邻的同步运动传动轴202上且位于两个并排布置的横向行走模块之间。
28.进一步地,横向行走模块包括梯形支撑外壳210、涡轮风扇外壳211、涡轮风扇212、涡轮风扇保护罩213、光轴支撑座214、光轴215、高强度联轴器216、全向轮217、全向轮驱动电机218、涡轮风扇驱动电机支架219和涡轮风扇驱动电机220,梯形支撑外壳210转动连接摇杆201,涡轮风扇外壳211固定安装在梯形支撑外壳210上,涡轮风扇保护罩213固定安装在涡轮风扇外壳211上,涡轮风扇驱动电机支架219固定安装在涡轮风扇外壳211内部,涡轮风扇驱动电机220固定安装在涡轮风扇驱动电机支架219上,全向轮驱动电机218固定安装在梯形支撑外壳210底部,光轴支撑座214固定安装在梯形支撑外壳210底部,光轴215转动安装在光轴支撑座214上,光轴215固定连接全向轮驱动电机218的主轴,高强度联轴器216套设在光轴215上,全向轮217固定安装在高强度联轴器216外部。当机器人遇到颠簸路面或者松软路面的时候,履带行走攀爬模块1停止工作,交替式行走及横向移动模块2启动,摇杆动力传输电机208工作,通过电机端摇杆主动力传输皮带207将动力传递至摇杆201上,通过第一摇杆动力传输皮带206和第二摇杆动力传输皮带209将动力进一步传递至各个摇杆201上,摇杆201的运转将带动四个梯形支撑外壳210进行周期性交替运动,这个交替运动将带动移动机器人底盘前行,当机器人需要横向移动时,将梯形支撑外壳210旋转至最低位,启动全向轮驱动电机218带动全向轮217运动即可,此时机器人的转向通过涡轮风扇212工作提供动力。
29.进一步地,能适应复杂环境的越障机器人还包括双旋翼横列式飞行模块3,双旋翼横列式飞行模块3包括螺旋桨支撑横梁301、舵机支撑座302、舵机联轴器303、无刷电机支架支撑座304、无刷电机支架支撑轴305、轴承306、无刷电机支架307、大功率无刷电机308、螺旋桨309、舵机310和无刷电机驱动器311,螺旋桨309支撑横梁301固定安装在履带行走攀爬模块支撑侧梁101的外侧,舵机支撑座302和无刷电机支架支撑座304固定安装在螺旋桨309支撑横梁301上,舵机310固定安装在舵机支撑座302上,无刷电机驱动器311固定安装在舵机310上,舵机联轴器303固定安装在舵机310主轴上,轴承306的外圈固定安装在无刷电机支架支撑座304上,无刷电机支架支撑轴305固定安装在轴承306的内圈上,无刷电机支架支撑轴305与舵机联轴器303相连接,无刷电机支架307固定安装在无刷电机支架支撑轴305上,大功率无刷电机308固定安装在无刷电机支架307上,螺旋桨309固定安装在大功率无刷电机308主轴上。当移动机器人想跨越大型障碍物的时候,可以启动两端的大功率无刷电机
308,带动移动机器人底盘进行飞行,同时舵机310可以控制飞行方向。值得注意的是,本实施例的双旋翼横列式飞行模块3有两个,两个双旋翼横列式飞行模块3分别固定安装在两个履带行走攀爬模块支撑侧梁101的外侧。
30.以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1