一种助力车的开关式力矩传感系统的制作方法
1.本发明属于力矩传感系统技术领域,具体涉及一种助力车的开关式力矩传感系统。
背景技术:
2.助力车以电池作为辅助动力来源,安有电机,并具备动力辅助系统,是能实现人力骑行和电机助动一体化的新型交通工具。按传感器来分,目前市面上常见的助力车可以分为两大类,一类是速度型,一类是力矩型。两者的区别是速度型助力自行车上只有速度传感器输出频率信号。而力矩型助力车上都装有力矩传感器。
3.力矩传感器又分为很多种,目前来讲安装最方便的是中轴力矩传感器。中轴力矩传感器安装在五通上,能根据人脚踩的力输出相应的信号,再通过电机控制器协作自动完成助力加速过程。现阶段,中轴的力矩检测主要分为应变片式和磁检测式两种。应变片式应变片粘贴对工艺要求很高,而且由于应变片粘贴在转子上,信号需要通过电刷导出,长期使用中,电刷由于摩擦而磨损,可靠性不高。虽有针对电刷磨损问题的改进方案,但是需要较大的空间来布置复杂的电路结构,应用范围受很大限制。磁检测式是通过无线传输方式来将中轴的扭曲形变转换为电信号,不存在机械磨损问题,但是电路复杂,成本高昂。
4.如授权公告号为cn1765692a所公开的小型电动/助力自行车/三轮车及其控制器与传感器,其虽然实现了使用新型传感器代替传统的人力蹬踏转矩传感器,并实行与车速、蹬踏转速等多传感器融合,组合有滑行惯性能量回馈/再生-反充电/电制动控制部分,实现对电动车的全面控制。新系列电动车与控制器根据路况参数智能确定控制策略,实现电动车的高性能、多功能、低功耗、低成本化,也易于大批量生产,满足高油价时代公众对电动车产品的巨大新需求。新技术可使电动车根据不同用户的个性化需求增减功能或组合,构成多种款式与功能的新系列电动/助力车,但却是以多轴加速度传感器为核心辅以速度传感器的一种检测方式,并未解决现有速度型助力车存在的低速或上坡时不能够根据用户需求输出电机助力的问题,为此我们提出一种助力车的开关式力矩传感系统,既能解决速度型传感器低速时无法准确输出客户所需助力的问题,又能大大降低系统成本。
技术实现要素:
5.本发明的目的在于提供一种助力车的开关式力矩传感系统,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种助力车的开关式力矩传感系统,包括控制模块,所述处理模块上电性连接有霍尔元件、角度传感器,所述霍尔元件用于当踩踏踏板导致曲柄受力、使中轴组件产生形变并通过霍尔元件能输出pwm信号,所述pwm信号用于测量脚踏的踏频并根据踏频速度来输出助力,所述角度传感器用于检测车辆上坡时根据所测角度进行助力输出;
7.所述控制模块上电性连接有电池模块,所述电池模块用于实现存储电量和供电运
行,所述控制模块上电性连接有驱动模块,所述驱动模块上电性连接有电机模块,所述驱动模块用于实现对所述电机模块进行驱动。
8.优选的,所述霍尔元件安装在中轴组件中,所述中轴组件上连接有两个磁性齿形圆盘,所述霍尔元件也设有两个,两个所述霍尔元件固定安装在中轴固定部分上,两个所述霍尔元件分别与两个所述磁性齿牙圆盘相对应设置。
9.优选的,所述控制模块上电性连接有开关模块,所述开关模块用于控制所述电池模块给所述驱动模块进行供电运行,所述控制模块上电性连接有霍尔元件,所述霍尔元件通过圆形齿盘感应磁场信号,根据两个霍尔元件输出信号的差异实现对所述电机模块进行驱动,使得所述电机模块输出助力。
10.优选的,所述处理模块中包括有数据信息接收电路、数据信息增益电路、数据信息转换电路、数据信息调制电路、数据信息滤波电路和比较器,所述数据信息接收电路用于实现对所述霍尔元件、所述角度传感器的数据信息进行接收,所述数据信息增益电路用于实现对接收的数据信息进行放大处理,所述数据信息转换电路用于实现放大后的数据信息进行格式转换,所述数据信息调制电路用于实现对格式转换后的数据信息进行波形调制,所述数据信息滤波电路用于实现对处理后的数据信息进行滤除杂波处理,所述比较器用于比较所述霍尔元件的波形。
11.优选的,所述控制模块中包括有比较器,所述比较器用于实现对设定的pwm波的占空比的阈值和采集到的pwm波的占空比值进行比较,当霍尔元件检测到的pwm波的占空比大于此阈值pwm波的占空比时,表示此时脚踏力矩大于设定值,所述控制模块控制所述电机模块输出助力。
12.优选的,所述控制模块中还包括有存储器、复位电路和晶振电路,所述存储器包括有用于存储程序体的rom存储器和用于存储运行日志的ram存储器,所述复位电路用于在出现故障的时候进行重启,所述晶振电路用于实现系统主频输入。
13.优选的,两个所述磁性齿形圆盘产生的相对位移与两个所述霍尔元件输出信号产生相位差异,所述霍尔元件输出信号为高低电平,将这两个霍尔信号经过比较器比较后,输出pwm波的占空比,所述pwm波的占空比大小代表霍尔信号相位差异大小与中轴变形位移的大小,所述pwm波的频率代表助力车的曲柄旋转的频率。
14.优选的,所述角度传感器采用的是陀螺仪,所述陀螺仪在车子处于上坡状态时,实时检测助力车的当前倾角,来增大电机助力输出。
15.与现有技术相比,本发明的有益效果是:
16.(1)本发明使用了一种新型的中轴力矩传感器检测方法,通过霍尔元件检测中轴形变,结构简单,容易实现。
17.(2)本发明采用比较器输出pwm波,以开关方式来确定在多大的脚踏力时启动电机助力,不用考虑传统力矩传感器的精度和线性度,成本低廉。
18.(3)本发明在力矩信号启动助力后,通过控制模块设置助力延时时间,解决速度型助力车启动需要用力踩的问题。
19.(4)本发明通过检测pwm波的频率能得到曲柄踩踏的频率,在高速时可根据中轴组件上的霍尔元件信号的频率确定电机助力,解决力矩型车高速时由于力矩信号小骑行累的问题,实现速度传感器功能。
20.(5)本发明通过在控制器内安装角度传感器,实时检测整车当前倾角,根据倾角计算电机输出助力大小,解决上坡费力的问题。
附图说明
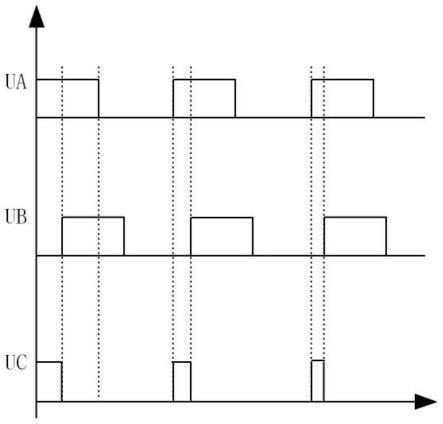
21.图1为本发明的pwm波形处理图;
22.图2为本发明的上坡力分析图。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.请参阅图1-图2,本发明提供一种技术方案:一种助力车的开关式力矩传感系统,包括控制模块,所述处理模块上电性连接有霍尔元件、角度传感器,所述霍尔元件用于当踩踏踏板导致曲柄受力、使中轴组件产生形变并通过霍尔元件能输出pwm信号,所述pwm信号用于测量脚踏的踏频并根据踏频速度来输出助力,所述角度传感器用于检测车辆上坡时根据所测角度进行助力输出;
25.所述控制模块上电性连接有电池模块,所述电池模块用于实现存储电量和供电运行,所述控制模块上电性连接有驱动模块,所述驱动模块上电性连接有电机模块,所述驱动模块用于实现对所述电机模块进行驱动。
26.其中,所述霍尔元件安装在中轴组件中,所述中轴组件上连接有两个磁性齿形圆盘,所述霍尔元件也设有两个,两个所述霍尔元件固定安装在中轴固定部分上,两个所述霍尔元件分别与两个所述磁性齿牙圆盘相对应设置。
27.其中,所述控制模块上电性连接有开关模块,所述开关模块用于控制所述电池模块给所述驱动模块进行供电运行,所述控制模块上电性连接有霍尔元件,所述霍尔元件通过圆形齿盘感应磁场信号,根据两个霍尔元件输出信号的差异实现对所述电机模块进行驱动,使得所述电机模块输出助力。
28.其中,所述处理模块中包括有数据信息接收电路、数据信息增益电路、数据信息转换电路、数据信息调制电路、数据信息滤波电路和比较器,所述数据信息接收电路用于实现对所述霍尔元件、所述角度传感器的数据信息进行接收,所述数据信息增益电路用于实现对接收的数据信息进行放大处理,所述数据信息转换电路用于实现放大后的数据信息进行格式转换,所述数据信息调制电路用于实现对格式转换后的数据信息进行波形调制,所述数据信息滤波电路用于实现对处理后的数据信息进行滤除杂波处理,所述比较器用于比较所述霍尔元件的波形。
29.其中,所述控制模块中包括有比较器,所述比较器用于实现对设定的pwm波的占空比的阈值和采集到的pwm波的占空比值进行比较,当霍尔元件检测到的pwm波的占空比大于此阈值pwm波的占空比时,表示此时脚踏力矩大于设定值,所述控制模块控制所述电机模块输出助力。
30.其中,所述控制模块中还包括有存储器、复位电路和晶振电路,所述存储器包括有
用于存储程序体的rom存储器和用于存储运行日志的ram存储器,所述复位电路用于在出现故障的时候进行重启,所述晶振电路用于实现系统主频输入。
31.其中,两个所述磁性齿形圆盘产生的相对位移与两个所述霍尔元件输出信号产生相位差异,所述霍尔元件输出信号为高低电平,将这两个霍尔信号经过比较器比较后,输出pwm波的占空比,所述pwm波的占空比大小代表霍尔信号相位差异大小与中轴变形位移的大小,所述pwm波的频率代表助力车的曲柄旋转的频率。
32.其中,所述角度传感器采用的是陀螺仪,所述陀螺仪在车子处于上坡状态时,实时检测助力车的当前倾角,来增大电机助力输出。
33.本发明的工作原理及使用流程:
34.本发明采用了一种新的方式来实现力矩传感器的功能。通过在车架五通上安装一个新型中轴组件替换原有车上的中轴组件,中轴组件的旋转部分装有两个相同充磁的磁性齿形圆盘,中轴组件的固定部分装有两个磁场检测元件,该磁场检测元件为霍尔元件,霍尔元件的输出信号为pwm波。当踩踏踏板导致曲柄受力,使中轴组件产生形变,通过这两个霍尔元件能输出两路pwm信号。将此两路信号经过比较器调整,能转换成一个pwm信号,该pwm信号的占空比就代表中轴扭转变形的程度。以此占空比作为扭矩输入信号量的大小,以pwm的频率来表示当前曲柄踩踏的速度,可以当速度传感器来使用。此外在原有的速度型助力自行车的基础上,通过在控制器内集成陀螺仪来实时测量整车当前倾角,确认当前整车所处的坡度,根据坡度来增加电机助力;具体过程如下:
35.中轴组件旋转部分与曲柄固定在一起,中轴上套有两个磁性齿形圆盘。磁性齿形圆盘的齿数可根据实际需要来确定。中轴组件的固定部分上装有两个磁电传感器,既是霍尔元件,用于检测磁性齿形圆盘的磁场。两个齿形圆盘的磁场完全一致,安装位置也一致,则通过两个磁电传感器输出的信号也一致。
36.当脚踩踏踏板,使曲柄受力,导致中轴组件产生扭曲形变时,由于两个磁性齿形圆盘产生的相对位移,会导致两个霍尔元件输出信号产生相位差异。霍尔元件输出信号为高低电平,ua代表霍尔元件1输出信号波形,ub代表霍尔元件2输出信号波形。将这两个霍尔信号经过比较器比较后,输出uc波形,该波形是一个pwm波。pwm波的占空比大小代表霍尔信号相位差异大小,也就是中轴组件变形位移的大小,pwm波的频率代表曲柄旋转的频率。
37.pwm波的占空比可以通过控制模块来测量,同时在控制模块内设置一个阈值占空比,该阈值占空比代表所设定的脚踏力矩。当检测到的占空比大于此阈值占空比时,表示此时脚踏力矩大于阈值,控制模块需要控制电机模块输出助力,实现了中轴组件的力矩传感器的启动条件。当启动后,可以设置一个助力延时时间,超过这个延时时间后再来检测pwm波的频率,来决定是继续输出助力还是切断助力。
38.实际情况下,由于安装问题,充磁问题,会导致在中轴没有形变的情况,两个霍尔的输出信号就已经存在相位差,因而需要软件对此相位差进行校零操作。
39.如果在车速为零或者车速较低的情况下,pwm波的占空比一直比较小或者为零,不超过所设定的标准占空比,表示此时脚踏受力较小,不满足启动助力条件,电机不会输出助力。
40.如果车速已经起来,pwm波的频率也较高,但是pwm的占空比比较低,表示此时正处在骑行状态,控制模块不再根据pwm的占空比来输出助力,而是根据pmw波的频率来输出助
力,系统自动切换为速度型传感器来输出助力。
41.当车子处于上坡状态时,为防止启动时脚踩的力大,pwm占空比大,启动后脚踩的力小导致输出助力小而慢慢减速,控制器内部pcb板上集成角度测量装置,实时检测整车当前倾角,来增大电机助力输出。
42.以水平路面的倾角为初始值,当整车上坡时,通过对获得的倾角数据进行计算,可得到当前整车的上坡坡度,根据整车重量和预估的人体体重,可以计算出当前重力沿坡度往下的阻力,根据此阻力大小,可以设定电机输出助力大小,这样即使踏频信号没有变化,也能在上坡时根据坡度实时增大电机的助力,实现力矩传感器助力的效果。
43.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1