一种中置电机力矩助力电动车及其驱动方法与流程
1.本发明属于电动助力自行车技术领域,具体涉及一种中置电机力矩助力电动车及其驱动方法。
背景技术:
2.电动助力自行车是一种新型的自行车,利用电能来作为辅助驱动能量的来源辅助骑行,实现人力骑行和电动助力一体化的新型交通工具。在骑行过程中,当遇到上坡或需要休息时,人们希望借助电力助力以减少骑行的疲劳,因此及时感知是否需要助力是电动自行车领域中的研究重点,现有技术中,采用力矩传感器对骑行速度进行监测,并辅以智能控制系统,骑行速度高于某限值,不提供助力,骑行速度低于某限值,则判定为需要助力。力矩助力电动车是根据骑行者给电动车施加力矩大小,自动调节电机输出力矩的助力电动车,当前多采用扭矩传感器,压力传感器等采集的信号作为输入信号。它跟普通电动车的区别是,普通电动车采用转把电位计作为电机输入控制信号,助力电动车是根据人蹬踏板产生的力矩自动判断输出力矩。这种通过采集力矩传感器的信号,再经过控制器计算并输出助力信号,这种助力控制方式存在结构复杂,成本高,力矩传感器采集的模拟信号传输受到稳定性和强度的影响等缺点。
技术实现要素:
3.本发明为了解决现有技术中的不足之处,提供一种结构简单、成本低、稳定、可靠性高的中置电机力矩助力电动车及其驱动方法。
4.为解决上述技术问题,本发明采用如下技术方案:一种中置电机力矩助力电动车,包括车体,车体的前侧斜梁上设有电池组和控制器,车体的中轴外部设有盘式助力电机;盘式助力电机包括与车体的中轴同轴设置的圆筒壳、定子盘和转子盘,圆筒壳左侧与中轴转动连接,定子盘固定设在圆筒壳内部左侧,转子盘设在圆筒壳内部右侧,转子盘内圆与中轴外圆之间通过花键结构传动连接,定子盘右侧与转子盘左侧之间具有气隙,中轴与转子盘之间设有气隙大小调节机构;转子盘左侧面外边缘沿圆周方向均匀设有若干个霍尔磁钢,圆筒壳内壁上设有位于转子盘左侧的三个霍尔传感器,三个霍尔传感器沿圆筒壳的圆周方向均匀布置,三个霍尔传感器所在的圆和若干个霍尔磁钢所在的圆半径相等且中心线重合,定子盘与控制器通过u、v、w三根相线连接,霍尔传感器通过hu、hv、hw、h+、h-五根霍尔线与控制器连接,电池组通过两根导线为控制器供电。
5.气隙大小调节机构包括碟簧、左圆环和右圆环,中轴外圆设有位于转子盘左侧的定位环,碟簧套在中轴外圆,碟簧左端与定位环右侧压接,碟簧右端与转子盘左侧面压接,左圆环固定设在转子盘右侧面,车体上的链盘设在中轴上并位于转子盘右侧,右圆环固定设在链盘左侧面,左圆环和右圆环同轴线且左右对应设置,左圆环右侧面沿圆周方向均匀设有至少三个第一弧形楔块,右圆环左侧面沿圆周方向均匀设有至少三个第二弧形楔块,三个第一弧形楔块与三个第二弧形楔块的楔面左右一一对应且相互压接配合。
6.链盘左侧面沿圆周方向开设有多个弧形限位孔,弧形限位孔、第一弧形楔块和第二弧形楔块的弧长相等,转子盘右侧面沿圆周方向开设有与弧形限位孔数量相同且一一对应的限位销,每根限位销对应伸入到一个弧形限位孔内。
7.转子盘包括左侧敞口的磁轭,磁轭内部设有与定子盘左右对应的永磁体,磁轭左侧面外边缘处设有若干个凹槽,每个霍尔磁钢对应安装在一个凹槽内。
8.控制器内部包括电流传感器、mos驱动模块、驱动芯片、滤波模块和中央处理器,电流传感器设有两个,两个电流传感器分别设置在三根相线的其中两根上,定子盘上的接线柱通过u、v、w三根相线与mos驱动模块连接,mos驱动模块通过驱动芯片与中央处理器连接,两个电流传感器通过滤波模块与中央处理器连接,中央处理器的信号输入端与三个霍尔传感器分别连接;控制器的cpu程序中按照电流和转速的关系预设电流值,电动车根据转速分配确定的驱动电流,当输入力矩压缩碟簧后通过盘式电机气隙变化输出相应的助力。
9.一种中置电机力矩助力电动车的驱动方法:骑行者双脚分别踩踏左右两侧的踏板,驱动中轴旋转,中轴通过花键结构带动转子盘旋转,链盘左侧的第二弧形楔块和转子盘右侧的第一弧形楔块的楔面产生挤压,挤压力f垂直于楔面,f分解为径向分力f1和轴向分力f2,径向分力f1驱动链盘旋转,在链盘上产生扭矩,链盘通过链条带动后车轮前行,挤压力f增大,径向分力f1和轴向分力f2也增大;转子盘在旋转过程中带动霍尔磁钢也旋转,三个霍尔传感器检测到霍尔磁钢的转速,即主轴的转速,将转速信号传输给控制器的中央处理器,中央处理器根据转速大小匹配一个相应的输出电流给盘式电机,该输出电流也就对应一定的输出力矩,盘式电机向中轴输出力矩助力,从而使骑行者更加省力;如果骑行者需要驱动电动车具有更高转速时,会增加蹬踩踏板的力矩,此时挤压力f增大,径向分力f1和轴向分力f2也增大,轴向分力f2克服碟簧的弹力,对踏板施加的外力越大,轴向分力f2也越大,从而推动转子盘在中轴上向左移动,气隙x减小,在同样的电流下会盘式电机会向中轴输出更大的力矩,从而达到加速的目的;在盘式电机的输出能力范围内,气隙和输出力矩成正比例关系;在盘式电机的助力下实现人力输出一个较小的力驱动电动车,从而达到省力骑行的目的;在电动车上坡或者大负载过程中,骑行者蹬踩踏板的力矩增大,中轴转速降低,霍尔传感器检测到霍尔磁钢的转速降低,中央处理器根据转速大小匹配一个相应较小的输出电流给盘式电机,即输出电流降低到一个新的值,但此时气隙x被压缩变小,盘式电机输出扭矩增大,扭矩增大后使得转子盘转速提高,从而使电池组为盘式电机分配的电流增大,这样就提高盘式电机输出扭矩,实现助力;反之,当骑行者蹬踩踏板的力矩减小,在碟簧的作用下气隙x增大,盘式电机输出力矩减小,盘式电机输出速度降低,即转子盘和中轴转速降低。
10.采用上述技术方案,本发明采用盘式电机的原理并结合自行车的结构作为电动车的助力动力。盘式电机的转子盘和定子盘,其磁场方向是和中轴轴线平行的。因此盘式电机也可称为轴向磁场电机。磁场从轴向走,不但磁能密度大,而且交换能量的空间也大,因此电机的转矩密度比径向磁场大幅提高。
11.根据电机原理,扭矩和气隙磁密关系式为: 其中te:扭矩;p:极对数;m:相数;:磁链;is:绕组电流;β:力矩角。
12.电机设计完成以后极对数、相数、力矩角都已经确定。在控制器给定一定电流的情况下磁链跟力矩成正比例关系。在磁场密度不饱和的前提下,盘式电机的定子盘与转子盘之间气隙和磁链之间是正比例的关系。因此,本发明通过调节气隙的大小来实现助力大小的自动调整。
13.本发明中的盘式电机安装再电动车的中轴上,盘式电机的定子盘和控制器之间通过u、v、w三根相线连接,盘式电机采用开关型霍尔传感器与霍尔磁钢作为转子盘的旋转位置反馈传感器,通过hu、hv、hw、h+、h-,五根霍尔线连接,控制器和电池组之间通过正、负两根导线连接。霍尔传感器设置三个,具有两个作用:一个是采集转子盘位置,用于盘式电机的驱动,另一个作用是通过霍尔脉冲信号间接测出盘式电机转速,同时通过链盘的传动比计算出电动车的行驶速度。
14.电动车脚蹬没有受到骑行者施加的扭矩时,盘式电机不输出扭矩。当骑行者对中轴施加一定扭矩时,控制器采集到中轴的转速信号,根据转速信号限定盘式电机三根相线的输出电流,中央处理器向盘式电机发出指令,盘式电机按照限定电流输出一定的扭矩。根据永磁直流无刷电机的原理,电压不变的情况下,三根相线的电流正比于输出扭矩。由于盘式电机的三根相线输出的电流大小是相同的,相位相差120
°
,因此只需要采集两相电流(在任意两根相线上设置电流传感器),进而可以计算出第三相电流大小。在一般的固定气隙x的盘式电机驱动过程中,通过外部给定的电压信号(通常采用转把控制电压大小),控制器通过程序中的电流环和速度环相结合,达到控制盘式电机输出一定速度的目标。
15.在第二弧形楔块和第一弧形楔块的楔面在相互挤压达到相对转动的同时,限位销在弧形限位孔内移动,当限位销与弧形限位孔的一端压接时,转子盘向左移动到极限,即气隙x达到最小值,电机的助力达到设定的最大值。限位销与弧形限位孔的配合,保证转子盘不能移动到与定子盘接触,从而保证助力的有效性。
16.本发明采用骑行者在对踏板施加外力的大小以使第二弧形楔块和第一弧形楔块的楔面在相互挤压,根据外力的大小来自动调整盘式电机转子盘与定子盘之间的气隙大小,来实现电机助力大小的输出。外力越大,助力越大,从而使得骑行者保持较为稳定的骑行力。
17.综上所述,本发明在骑行过程中可自动判断盘式电机应该输出多大的扭矩和速度,具有原理科学,体积小,结构紧凑,方便安装的优点,根据骑行者对踏板施加外力的大小更为直接且精准地转换为盘式电机的气隙大小,根据中轴转速大小给予提供助力的合适扭矩,从而达到对施加不同骑行外力时,助力大小快速、精确调节,且能够应用于自行车各种应用场合,不受路况影响。
附图说明
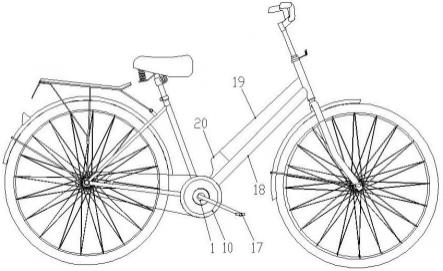
18.图1是本发明的整体外形示意图;图2是本发明中盘式电机安装在中轴上的结构示意图;图3是图2中a向示意图;
图4是图2中b-b剖视图;图5是图1中链盘的立体结构示意图;图6是图1中转子盘右侧的立体结构示意图;图7是本发明中盘式电机、控制器和电池组之间的连接示意图;图8是控制器的原理结构示意图;图9是电流i和转速n的函数关系图。
具体实施方式
19.如图1-图9所示,本发明的一种中置电机力矩助力电动车,包括车体,车体的前侧斜梁18上设有电池组19和控制器20,车体的中轴1外部设有盘式助力电机;盘式助力电机包括与车体的中轴1同轴设置的圆筒壳2、定子盘3和转子盘4,圆筒壳2左侧与中轴1转动连接,定子盘3固定设在圆筒壳2内部左侧,转子盘4设在圆筒壳2内部右侧,转子盘4内圆与中轴1外圆之间通过花键结构5传动连接,定子盘3右侧与转子盘4左侧之间具有气隙x,中轴1与转子盘4之间设有气隙大小调节机构;转子盘4左侧面外边缘沿圆周方向均匀设有若干个霍尔磁钢21,圆筒壳2内壁上设有位于转子盘4左侧的三个霍尔传感器22,三个霍尔传感器22沿圆筒壳2的圆周方向均匀布置,三个霍尔传感器22所在的圆和若干个霍尔磁钢21所在的圆半径相等且中心线重合,定子盘3与控制器20通过u、v、w三根相线连接,霍尔传感器22通过hu、hv、hw、h+、h-五根霍尔线23与控制器20连接,电池组19通过两根导线为控制器20供电。
20.气隙大小调节机构包括碟簧6、左圆环7和右圆环8,中轴1外圆设有位于转子盘4左侧的定位环9,碟簧6套在中轴1外圆,碟簧6左端与定位环9右侧压接,碟簧6右端与转子盘4左侧面压接,左圆环7固定设在转子盘4右侧面,车体上的链盘10设在中轴1上并位于转子盘4右侧,右圆环8固定设在链盘10左侧面,左圆环7和右圆环8同轴线且左右对应设置,左圆环7右侧面沿圆周方向均匀设有至少三个第一弧形楔块11,右圆环8左侧面沿圆周方向均匀设有至少三个第二弧形楔块12,三个第一弧形楔块11与三个第二弧形楔块12的楔面左右一一对应且相互压接配合。
21.链盘10左侧面沿圆周方向开设有多个弧形限位孔13,弧形限位孔13、第一弧形楔块11和第二弧形楔块12的弧长相等,转子盘4右侧面沿圆周方向开设有与弧形限位孔13数量相同且一一对应的限位销14,每根限位销14对应伸入到一个弧形限位孔13内。
22.转子盘4包括左侧敞口的磁轭15,磁轭15内部设有与定子盘3左右对应的永磁体16,磁轭15左侧面外边缘处设有若干个凹槽,每个霍尔磁钢21对应安装在一个凹槽内。
23.控制器20内部包括电流传感器24、mos驱动模块25、驱动芯片26、滤波模块27和中央处理器28,电流传感器24设有两个,两个电流传感器24分别设置在三根相线的其中两根上,定子盘3上的接线柱通过u、v、w三根相线与mos驱动模块25连接,mos驱动模块25通过驱动芯片26与中央处理器28连接,两个电流传感器24通过滤波模块27与中央处理器28连接,中央处理器28的信号输入端与三个霍尔传感器22分别连接;控制器的cpu程序中按照电流和转速的关系预设电流值,电动车根据转速分配确定的驱动电流,当输入力矩压缩碟簧后通过盘式电机气隙变化输出相应的助力。
24.一种中置电机力矩助力电动车的驱动方法:包括以下过程:骑行者双脚分别踩踏左右两侧的踏板17,驱动中轴1旋转,中轴1通过花键结构5带动转子盘4旋转,链盘10左侧的
第二弧形楔块12和转子盘4右侧的第一弧形楔块11的楔面产生挤压,挤压力f垂直于楔面,f分解为径向分力f1和轴向分力f2,径向分力f1驱动链盘10旋转,在链盘10上产生扭矩,链盘10通过链条带动后车轮前行,挤压力f增大,径向分力f1和轴向分力f2也增大;转子盘4在旋转过程中带动霍尔磁钢21也旋转,三个霍尔传感器22检测到霍尔磁钢21的转速,即主轴的转速,将转速信号传输给控制器20的中央处理器28,中央处理器28根据转速大小匹配一个相应的输出电流给盘式电机,该输出电流也就对应一定的输出力矩,盘式电机向中轴1输出力矩助力,从而使骑行者更加省力;如果骑行者需要驱动电动车具有更高转速时,会增加蹬踩踏板17的力矩,此时挤压力f增大,径向分力f1和轴向分力f2也增大,轴向分力f2克服碟簧6的弹力,对踏板17施加的外力越大,轴向分力f2也越大,从而推动转子盘4在中轴1上向左移动,气隙x减小,在同样的电流下会盘式电机会向中轴1输出更大的力矩,从而达到加速的目的;在盘式电机的输出能力范围内,气隙和输出力矩成正比例关系;在盘式电机的助力下实现人力输出一个较小的力驱动电动车,从而达到省力骑行的目的;控制器20的程序中电流i、转速n与时间t按照一定的函数关系一一对应,如图9所示。
25.在电动车上坡或者大负载过程中,骑行者蹬踩踏板17的力矩增大,中轴1转速降低,霍尔传感器22检测到霍尔磁钢21的转速降低,中央处理器28根据转速大小匹配一个相应较小的输出电流给盘式电机,即输出电流降低到一个新的值,但此时气隙x被压缩变小,盘式电机输出扭矩增大,扭矩增大后使得转子盘4转速提高,从而使电池组19为盘式电机分配的电流增大,这样就提高盘式电机输出扭矩,实现助力;反之,当骑行者蹬踩踏板17的力矩减小,在碟簧6的作用下气隙x增大,盘式电机输出力矩减小,盘式电机输出速度降低,即转子盘4和中轴1转速降低。
26.本实施例并非对本发明的形状、材料、结构等作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1