一种双电机驱动的电动转向装置及其控制方法
1.本发明涉及汽车转向技术领域,具体涉及一种双电机驱动的电动转向装置及其控制方法。
背景技术:
2.目前商用车转向系统主要采用的是传统的液压助力转向系统,转向装置为循环球液压助力转向器,但是液压助力转向存在以下几个问题:助力特性固定,不能随车速进行实时调节;高速路感较差;能量损失严重;不能够满足商用车智能化发展的需求。
3.电动助力系统是由电机直接提供助力,能够有效解决液压助力转向系统存在的诸多问题。在cn1647994a中公开了一种名称为“循环球电动助力转向器”的发明专利,这种结构的助力转向器能起到一定的助力作用,近年来在轻卡上已经实现产品化。但是由于循环球电动助力转向器结构无法承受较大的扭矩,因此无法传递较大的扭矩,因此其还只是应用在小型汽车及轻型货车上,无法在重载商用车上使用。
4.当前,汽车产业的智能化发展正在不断加速,商用车的智能化发展对电动化转向系统的需求迫切。为了实现中重型商用车的纯电动化,需要克服传统电动助力的结构限制,寻找一种具有承载能力强、寿命长的转向执行机构。
5.为了克服中重型商用车较大的转向阻力矩,需要采用两个转向执行电机同时输出力矩,在运行过程中必然存在力矩纷争,使转向执行系统效率下降,加快其老化磨损。同时,在其中一个电机出现故障时,转向系统应快速完成故障诊断与故障重构,保留部分转向能力,防止危险的发生。
技术实现要素:
6.本发明的目的在于提供一种双电机驱动的电动转向装置及其控制方法,以解决现有技术中存在的问题。
7.为实现上述目的,本发明采用的技术方案是:一种双电机驱动的电动转向装置,包括:转矩转角传感器组件、锥齿轮副、行星摆线针轮减速器、双电机组件;所述转矩转角传感器组件与所述行星摆线针轮减速器通过所述锥齿轮副连接;其中,所述行星摆线针轮减速器由一个行星齿轮减速机的前级和一个摆线针轮减速机的后级组成,所述双电机组件通过齿轮副与所述行星齿轮减速机的前级啮合传动,所述行星摆线针轮减速器的输出法兰与摇臂轴为一体;所述双电机组件输出的助力转矩与方向盘的手力矩叠加后经所述行星摆线针轮减速器输出到所述摇臂轴上,所述双电机组件中的转向控制器根据车速、负载转矩、方向盘的手转矩及转角信息控制所述双电机组件动作;所述双电机组件中的两个电机可单独工作或同时工作。
8.可选实施例中,所述转矩转角传感器组件设置有转向装置输入轴、扭杆、转矩转角传感器、锥齿轮副的第一锥齿轮;所述扭杆一端与所述转向装置输入轴通过圆柱销固定连接,所述扭杆的另一端通过花键的过盈配合与所述第一锥齿轮固定连接,所述转矩转角传
感器布置在所述转向装置输入轴与所述第一锥齿轮之间,所述转矩转角传感器的磁环部与所述转向装置输入轴连接,所述转矩转角传感器的转子部分与所述第一锥齿轮连接。
9.可选实施例中,所述转矩转角传感器组件还设置有转矩转角传感器端盖和第一端盖;所述转矩转角传感器的本体由第一端盖固定定位,所述转向装置输入轴上安装有一组第四深沟球轴承,所述第四深沟球轴承的外端与所述转矩转角传感器端盖上的轴承座连接;所述第一锥齿轮上安装有一组第三深沟球轴承,所述第三深沟球轴承的外端与所述第一端盖上的轴承座连接。
10.可选实施例中,所述行星摆线针轮减速器设置有行星齿轮副、摆线针轮减速器、主壳体及第二端盖;其中,所述第二端盖作为所述摇臂轴的支撑,所述第一端盖、主壳体、第二端盖依次通过螺栓连接。
11.可选实施例中,所述第一端盖设置有两个大通孔和法兰,所述双电机组件的第一电机、第二电机分别安装在两个所述大通孔的一侧端面法兰上,大通孔作为电机的安装止口;所述行星齿轮副包括一个行星齿轮太阳轮零件和三个结构相同的行星齿轮,所述行星齿轮太阳轮零件依次设置有第二锥齿轮、太阳轮大齿轮、太阳轮小齿轮;所述第二锥齿轮与所述转矩转角传感器总成中的第一锥齿轮啮合,所述第一锥齿轮的轴线与所述第二锥齿轮的轴线之间交角为 90
°
;所述太阳轮大齿轮与第一电机齿轮、第二电机齿轮同时啮合,所述太阳轮小齿轮与三个所述行星齿轮同时啮合。
12.可选实施例中,所述行星摆线针轮减速器设置有三个摆线曲柄轴、第一摆线齿轮、第二摆线齿轮和一个支撑法兰、输出法兰,三个所述行星齿轮分别通过花键连接三个所述摆线曲柄轴,三个所述摆线曲柄轴结构相同,每个所述摆线曲柄轴的两端均通过一对角接触滚子轴承支撑在所述输出法兰和支撑法兰上,三个所述摆线曲柄轴沿着所述输出法兰和支撑法兰的轴线均匀分布,彼此间隔120
°
。
13.可选实施例中,所述摆线曲柄轴的中间设置有两段相位相差180
°
的偏心轴颈,两段所述偏心轴颈分别通过第一曲柄轴承和第二曲柄轴承套在所述第一摆线齿轮及第二摆线齿轮上,所述第一摆线齿轮和第二摆线齿轮的边缘与针齿接触,所述针齿安装在所述主壳体上。
14.可选实施例中,所述输出法兰和支撑法兰通过螺钉固定连接,所述输出法兰和支撑法兰分别通过第一主轴承和第二主轴承支撑在所述主壳体上,形成轴向定位;所述行星摆线针轮减速器的输出法兰与所述摇臂轴设计为一体,所述摇臂轴通过轴承安装在第二端盖上。
15.可选实施例中,所述第一电机、第二电机的输出轴分别固定连接有第一电机齿轮、第二电机齿轮,所述转向控制器包括第一控制单元和第二控制单元,所述第一控制单元与所述第一电机通信连接,所述第二控制单元与所述第二电机通信连接,所述第一控制单元和第二控制单元接收总线传来的车速、发动机转速信息,控制所述第一电机和第二电机实现转向系统的助力转向和主动转向功能。
16.另一方面.本发明实施例中还提供了一种如上所述的一种双电机驱动的电动转向装置的控制方法,包括:采用三闭环pid伺服控制策略跟随目标转向角,设计双电机全局快速终端滑模同步控制策略,监测电机的运行状态,快速完成故障下的系统重构;
17.所述的包含三闭环pid伺服控制策略和全局快速终端滑模同步控制策略的双电机
驱动的电动转向装置的控制方法步骤如下:
18.步骤1:建立双转向执行电机的运动微分方程和电学方程
[0019][0020][0021]
式中:t
m1
=k
t1ia1
,t
m2
=k
t2ia2
,其中,t
m1
,t
m2
分别为两转向执行电机的电磁转矩,k
t1
,k
t2
为两电机的电磁转矩系数,i
a1
,i
a2
分别为两电机的电流;θ
m1
,θ
m2
分别为两电机的转角;j
m1
,j
m2
分别为两电机转子的转动惯量;b
m1
,b
m2
分别为两电机转子的阻尼系数;t
a1
,t
a2
分别为两转向执行电机的输出转矩;k
e1
,k
e2
为两电机的反电动势系数;u1,u2分别为两电机电枢回路电压;l1,l2分别为两电机绕组电感;r1,r2分别为两电机绕组的电阻;
[0022]
步骤2:设计pid三闭环电机伺服控制策略
[0023]
将电机目标转角和实际转角的差值作为位置环pid控制策略输入量,计算得到理想电机转速;将理想电机转速与实际转速的差值作为速度环pid控制策略输入量,计算得到理想电机电流;将理想电机电流与实际电流的差值作为电流环pid控制策略输入量,计算得到理想电机控制电压。对于其中任意一个电机pid三闭环电机伺服控制策略设计如下:
[0024][0025]
式中:k
p_pos
,k
p_spd
,k
p_i
分别为电机位置控制、速度控制和电流控制的比例系数;k
i_pos
,k
i_spd
,k
i_i
分别为电机位置控制、速度控制和电流控制的积分系数;k
i_pos
,k
i_spd
,k
i_i
分别为电机位置控制、速度控制和电流控制的微分系数; u
pos
,u
spd
,ui分别为电机位置控制、速度控制和电流控制的控制量;e为状态误差;τ为延迟时间;
[0026]
步骤3:设计双电机全局快速终端滑模同步控制策略
[0027]
设计全局快速终端滑模同步控制策略以减小双电机在运行过程中出现的转角、转速和转矩同步误差。滑模面设计如下:
[0028][0029]
式中:α,β>0;p>q,p,q是正奇数;α,β,p,q都是滑模面的参数,通过合理调整可以使系统在有限时间内快速收敛到平衡状态。
[0030]
选取指数趋近律:
[0031][0032]
式中:
[0033][0034]
式中:k是指数趋近律的趋近速度系数,k>0;ε是比例因子;δ是边界层厚度;
[0035]
在电机速度环加入控制律计算得到的同步电流,设计全局快速终端滑模同步控制律如下:
[0036][0037]
式中:k
t
为两电机的平均电磁转矩系数jm为两电机转子的平均转动惯量bm为两电机转子的平均阻尼系数设计时,优选的两电机参数保持一致,此时,k
t
=k
t1
=k
t2
,jm=j
m1
=j
m2
, bm=b
m1
=b
m2
。
[0038]
本发明的有益效果在于:
[0039]
(1)本发明中的双电机驱动的电动转向装置的双电机采用独立的控制单元控制,双电机的可以利用现有的24v系统供电而不至于产生较大电流;高速行驶转向等转向阻力比较小时可以仅靠一个电机实现转向助力,也可以实现系统的冗余备份,能够保证转向系统的容错性;提高转向系统的安全性能,还可以实现自动驾驶等转向系统的线控任务。
[0040]
(2)本发明中的双电机驱动的电动转向装置采用了行星摆线针轮机构,其包含两级减速装置,传动比范围大,方便转向电机的选择及整车的匹配,能够满足商用车电动助力转向的大负载需求。此外,由于摆线针轮的传动件之间是滚动摩擦,摩擦阻力小,系统的使用寿命长。
附图说明
[0041]
(3)本发明针对双电机由于电机参数不一致、内外扰动以及电流突变等导致的不同步问题,设计了双电机全局快速终端滑模同步控制策略,避免了双电机在运行过程中出现的力矩纷争,在发生单电机执行器故障时,可以快速完成系统重构,使转向系统具备故障可操作性,提高了转向系统的安全性。
[0042][0043]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
[0044]
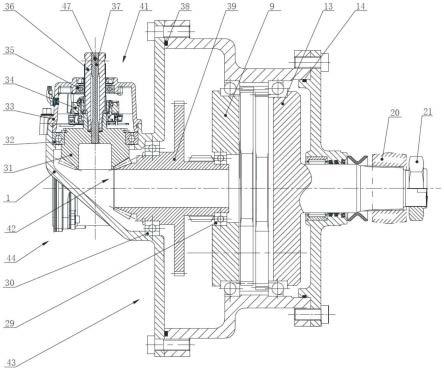
图1是本发明双电机驱动的电动转向装置的正势剖面图;
[0045]
图2是本发明双电机驱动的电动转向装置的俯视剖面图;
[0046]
图3是双电机驱动的电动转向装置的控制方法框图;
[0047]
图4是双电机全局快速终端滑模同步控制律的框图。
[0048]
图中:1-第一端盖,2-第一电机,3-第一电机齿轮,4-第二电机,5-第二电机齿轮,6-螺栓,7-第一轴端挡圈,8-主壳体,9-支撑法兰,10-螺钉,11-第一主轴承,12-第二主轴承,13-输出法兰,14-第一密封圈,15-螺栓,16-第二端盖,17-圆柱滚子轴承,18-第二密封圈,19-摇臂轴防尘罩,20-转向摇臂,21
‑ꢀ
摇臂锁紧螺母,22-第一摆线齿轮,23-第二摆线齿轮,24-摆线曲柄轴,25-角接触滚子轴承,26-第一曲柄轴承,27-针齿,28-第二曲柄轴承,29-第一深沟球轴承,30-第二深沟球轴承,31-第一锥齿轮,32-第三深沟球轴承,33-转矩转角传感器端盖,34-转矩转角传感器,35-第四深沟球轴承,36-转向装置输入轴,37
‑ꢀ
扭杆,38-第三密封圈,39-行星齿轮太阳轮零件,40-第二轴端挡圈,41-转矩转角传感器组件,42-锥齿轮副,43-行星摆线针轮减速器,44-双电机组件,45
‑ꢀ
行星齿轮副,46-行星齿轮,47-圆柱销。
具体实施方式
[0049]
为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0050]
需要说明的是,当部件被称为“固定于”或“设置于”另一个部件,它可以直接或者间接位于该另一个部件上。当一个部件被称为“连接于”另一个部件,它可以是直接或者间接连接至该另一个部件上。术语“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置为基于附图所示的方位或位置,仅是为了便于描述,不能理解为对本技术方案的限制。术语“第一”、“第二”仅用于便于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明技术特征的数量。“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0051]
参阅附图1-2,本实施例的目的在于提供了一种双电机驱动的电动转向装置,包括:转矩转角传感器组件41、锥齿轮副42、行星摆线针轮减速器43、双电机组件44;转矩转角传感器组件41与行星摆线针轮减速器43通过锥齿轮副42连接;其中,行星摆线针轮减速器43由一个行星齿轮减速机的前级和一个摆线针轮减速机的后级组成,双电机组件44通过齿轮副与行星齿轮减速机的前级啮合传动,行星摆线针轮减速器43的输出法兰13与摇臂轴为一体。
[0052]
具体地,双电机组件44输出的助力转矩与方向盘的手力矩叠加后经行星摆线针轮减速器43输出到摇臂轴上,双电机组件44中的转向控制器根据车速、负载转矩、方向盘的手转矩及转角信息控制双电机组件44动作;双电机组件 44中的两个电机可单独工作或同时工作。需要指出的是,双电机组件44中的第一电机2、第二电机4的输出轴分别固定连接有第一电机齿轮3、第二电机齿轮5,第一电机2及第二电机4的输出轴右端分别设置有第一轴端挡圈7和第二轴端挡圈40,转向控制器包括第一控制单元和第二控制单元,第一控制单元与第一电机2通信连接,第二控制单元与第二电机4通信连接,第一控制单元和第二控制单元
接收总线传来的车速、发动机转速信息,控制第一电机2和第二电机4实现转向系统的助力转向和主动转向功能。双电机采用独立的控制单元控制,双电机的可以利用现有的24v系统供电而不至于产生较大电流;高速行驶转向等转向阻力比较小时可以仅靠一个电机实现转向助力,也可以实现系统的冗余备份,能够保证转向系统的容错性,提高转向系统的安全性能;还可以实现自动驾驶等转向系统的线控任务。
[0053]
进一步地,转矩转角传感器组件41设置有转向装置输入轴36、扭杆37、转矩转角传感器34、锥齿轮副42的第一锥齿轮31;扭杆37一端与转向装置输入轴36通过圆柱销47固定连接,扭杆37的另一端通过花键的过盈配合与第一锥齿轮31固定连接,转矩转角传感器34布置在转向装置输入轴36与第一锥齿轮31之间,转矩转角传感器34的磁环部与转向装置输入轴36连接,转矩转角传感器34的转子部分与第一锥齿轮31连接。转矩转角传感器组件41还设置有转矩转角传感器端盖33和第一端盖1;转矩转角传感器34的本体由第一端盖1 固定定位,转向装置输入轴36上安装有一组第四深沟球轴承35,第四深沟球轴承35的外端与转矩转角传感器端盖33上的轴承座连接;第一锥齿轮31上安装有一组第三深沟球轴承32,第三深沟球轴承32的外端与第一端盖1上的轴承座连接。行星摆线针轮减速器43设置有行星齿轮副45、摆线针轮减速器、主壳体8及第二端盖16;其中,第二端盖16作为摇臂轴的支撑,第一端盖1、主壳体8、第二端盖16依次通过螺栓连接。
[0054]
此外,第一端盖1设置有两个大通孔和法兰,双电机组件44的第一电机2、第二电机4分别安装在两个大通孔的一侧端面法兰上,大通孔作为电机的安装止口;行星齿轮副45包括一个行星齿轮太阳轮零件39和三个结构相同的行星齿轮46,行星齿轮太阳轮零件39依次设置有第二锥齿轮、太阳轮大齿轮、太阳轮小齿轮;第二锥齿轮与转矩转角传感器总成41中的第一锥齿轮31啮合,第一锥齿轮31的轴线与第二锥齿轮的轴线之间交角为90
°
,该成对锥齿轮传动比优选为1:2;太阳轮大齿轮与第一电机齿轮3、第二电机齿轮5同时啮合,太阳轮小齿轮与三个行星齿轮46同时啮合。摆线针轮减速器的传动比优选 34~46之间,电机齿轮与太阳轮大齿轮之间的传动比优选10~15之间,从而保证转向装置的传动比在17~23。电机到输出轴轴的传动比在500左右。行星摆线针轮减速器43设置有三个摆线曲柄轴24、第一摆线齿轮22、第二摆线齿轮 23和一个支撑法兰9、输出法兰13,三个行星齿轮46分别通过花键连接三个摆线曲柄轴24,三个摆线曲柄轴24结构相同,每个摆线曲柄轴24的两端均通过一对角接触滚子轴承25支撑在输出法兰13和支撑法兰9上,三个摆线曲柄轴24沿着输出法兰13和支撑法兰9的轴线均匀分布,彼此间隔120
°
。摆线曲柄轴24的中间设置有两段相位相差180
°
的偏心轴颈,两段偏心轴颈分别通过第一曲柄轴承26和第二曲柄轴承28套在第一摆线齿轮22及第二摆线齿轮 23上,第一摆线齿轮22和第二摆线齿轮23的边缘与针齿27接触,针齿27安装在主壳体8上。输出法兰13和支撑法兰9通过螺钉10固定连接,输出法兰 13和支撑法兰9分别通过第一主轴承11和第二主轴承12支撑在主壳体8上,形成轴向定位;行星摆线针轮减速器43的输出法兰13与摇臂轴设计为一体,摇臂轴通过轴承安装在第二端盖16上。该双电机驱动的电动转向装置通过行星摆线针轮机构实现大传动比和大力矩的输出,电机助力可以被充分放大,且正效率和逆效率都很高。
[0055]
其工作过程为:电动助力模式下,当驾驶员手力通过方向盘、转向管柱、中间轴等传递到转向装置输入轴36时,转向装置输入轴36通过圆柱销47、扭杆37带动第一锥齿轮31转动,第一锥齿轮31与行星齿轮太阳轮零件39上的第二锥齿轮部分啮合,行星齿轮太阳轮
零件39跟随转向装置输入轴36转动。在此过程中,设置在第一锥齿轮31及转向装置输入轴36上的转矩转角传感器 34将测量到的转矩及转角信息传递给转向控制器,转向控制器控制第一电机2、第二电机4转动,第一电机2带动固连的第一齿轮3转动,第一齿轮3与行星齿轮太阳轮零件39上的大齿轮部分啮合,同理,第二电机4带动固连的第二齿轮5转动,第二齿轮5与行星齿轮太阳轮零件39上的大齿轮部分啮合,因此,双电机的助力与来自驾驶员手力汇聚到行星齿轮太阳轮零件39上,行星齿轮太阳轮零件39上的力经过行星齿轮副及摆线针轮副传递至摇臂轴,这一过程动力的传递路线为:行星齿轮太阳轮零件39
→
行星齿轮46
→
摆线曲柄轴24
→
角接触滚子轴承25
→
支撑法兰9
→
螺钉10
→
摇臂轴13。动力传递至摇臂轴后,又经垂臂、转向直拉杆、转向节和转向横拉杆传递给左右车轮,全程保持机械连接。
[0056]
通过锥齿轮副、行星摆线针轮减速器匹配使得转向装置的传动比在17~23 之间。两个电机的输出力矩经过齿轮副、行星齿轮副传递、摆线针轮副放大与驾驶员手力共同作用克服转向阻力,电机到摇臂轴的传动比在500左右。
[0057]
此电动助力模式下,转向所需转向助力较小时,系统处于单电机工作模式,转向控制器只需控制单个电机即可;转向所需转向助力较大时,系统处于双电机工作模式,两个电机根据扭矩信号各分配50%左右的助力电流。单电机工作模式下,若某个电机或者对应的控制单元发生故障,则转向控制器可控制另一控制单元和电机,完成转向需求。双电机工作模式下,若某个电机或者对应的控制单元发生严重故障,则转向控制器控制故障电机停止工作,同时执行单电机转向助力的控制方法,调整转向控制器中的控制参数,实现转向功能。
[0058]
除电动助力模式外,本发明的双电机驱动的电动转向装置也可工作在主动转向模式。车辆进入自动驾驶模式下,转向控制器获得转角指令,所述双电机组件44的第一电机2和第二电机4同时进行转角控制。
[0059]
如附图3和附图4所示,为双电机驱动的电动转向装置的控制方法框图。所述控制方法包含双电机的转角伺服策略、双电机的同步控制策略。在自动驾驶模式下,自动驾驶控制模块向转向控制器下达目标角度信号,转向电机接收目标转角指令,将目标转角与传感器反馈的实际转角信号之差作为位置环pid 控制器的输入,输出计算得到的目标转速与传感器反馈的实际转速之差得到速度环pid控制器的输入,速度环输出电机的目标电流,电机的电流环pid控制器对目标电流进行跟踪,从而实现主动转向下的转角伺服控制。同时,全局快速终端滑模控制器输出同步电流反馈到双电机的电流环,从而减小双电机的转角、转速和转矩同步误差,所述全局快速终端滑模控制器的控制律如附图4所示。
[0060]
所述双电机驱动的电动转向装置的控制方法按照如下4个步骤建立:
[0061]
步骤1:建立双转向执行电机的运动微分方程和电学方程
[0062][0063][0064]
式中:t
m1
=k
t1ia1
,t
m2
=k
t2ia2
,其中,t
m1
,t
m2
分别为两转向执行电机的电磁转矩,kt1
,k
t2
为两电机的电磁转矩系数,i
a1
,i
a2
分别为两电机的电流;θ
m1
,θ
m2
分别为两电机的转角;j
m1
,j
m2
分别为两电机转子的转动惯量;b
m1
,b
m2
分别为两电机转子的阻尼系数;t
a1
,t
a2
分别为两转向执行电机的输出转矩;k
e1
,k
e2
为两电机的反电动势系数;u1,u2分别为两电机电枢回路电压;l1,l2分别为两电机绕组电感;r1,r2分别为两电机绕组的电阻。
[0065]
步骤2:设计pid三闭环电机伺服控制策略
[0066]
将电机目标转角和实际转角的差值作为位置环pid控制策略输入量,计算得到理想电机转速;将理想电机转速与实际转速的差值作为速度环pid控制策略输入量,计算得到理想电机电流;将理想电机电流与实际电流的差值作为电流环pid控制策略输入量,计算得到理想电机控制电压。对于其中任意一个电机pid三闭环电机伺服控制策略设计如下:
[0067][0068]
式中:k
p_pos
,k
p_spd
,k
p_i
分别为电机位置控制、速度控制和电流控制的比例系数;k
i_pos
,k
i_spd
,k
i_i
分别为电机位置控制、速度控制和电流控制的积分系数;k
i_pos
,k
i_spd
,k
i_i
分别为电机位置控制、速度控制和电流控制的微分系数; u
pos
,u
spd
,ui分别为电机位置控制、速度控制和电流控制的控制量;e为状态误差;τ为延迟时间。
[0069]
采用三闭环pid算法的控制策略具有较好的位置、速度和电流跟踪特性,满足转向执行电机对不同工况的适应性要求。双电机通过上述均采用三闭环控制情况下,当有一套电机控制器发生故障时,pid算法可自动补偿电机失效故障带来的误差增大问题,整个过程中,可以快速完成系统的故障重构。
[0070]
步骤3:设计双电机全局快速终端滑模同步控制策略
[0071]
为了避免两个转向执行电机在伺服过程中出现力矩纷争,设计全局快速终端滑模同步控制策略以减小双电机在运行过程中出现的转角、转速和转矩同步误差。滑模面设计如下:
[0072][0073]
式中:α,β>0;p>q,p,q是正奇数;α,β,p,q都是滑模面的参数,通过合理调整可以使系统在有限时间内快速收敛到平衡状态。
[0074]
选取指数趋近律:
[0075][0076]
式中:
[0077][0078]
式中:k是指数趋近律的趋近速度系数,k>0;ε是比例因子;δ是边界层厚度。
[0079]
控制律如附图4所示,通过在电机速度环加入控制律计算得到的同步电流避免了双电机在转角伺服过程中的力矩纷争。设计全局快速终端滑模同步控制律如下:
[0080][0081]
式中:k
t
为两电机的平均电磁转矩系数jm为两电机转子的平均转动惯量bm为两电机转子的平均阻尼系数设计时,优选的两电机参数保持一致,此时,k
t
=k
t1
=k
t2
,jm=j
m1
=j
m2
, bm=b
m1
=b
m2
。
[0082]
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1