一种仿生陪伴机器人
1.本发明主要涉及机器人技术领域,具体是一种仿生陪伴机器人。
背景技术:
2.我国人口老龄化已经进入快速发展阶段,呈现出绝对规模大、发展速度快、高龄化显著等特点,随着经济的发展与社会的进步,老年人的陪护问题是多数家庭不得不考虑的一个问题。研发一个具备实时健康监测、实时定位、智能语音交互、仿生系统的机器人来解决老年陪护问题不失为一条很好的途径。
3.现有技术中针对宠物机器人的仿生运动技术,能够通过对仿生学动物进行研究,分析仿生动物经常出现的基本动作,研究动物骨骼,以捕捉到动物肢体动作的正确轨迹,能够使机器人更好的模拟动物的移动方式,提高机器人的仿真性。
4.而现有技术中的仿生陪伴宠物机器人在使用时,宠物机器人的足部一般仅设置为扁平的形状,从而增加机器人足部与底面之间的接触面积,由于在使用过程中机器人会遇到不同路况,单一的机器人足部无法适应多种不同路况,影响机器人行走的稳定性。
技术实现要素:
5.为解决现有技术的不足,本发明提供了一种仿生陪伴机器人,本装置在使用时,能够通过机械腿底部的变足机构对机器人的足部进行更换,提高机器人对不同路况的适应性,提高本装置的稳定性。
6.本发明为实现上述目的,通过以下技术方案实现:
7.一种仿生陪伴机器人,包括主体,所述主体两侧的前部和后部分别固定安装支架,所述支架上均设有带有驱动装置的机械腿,所述机械腿的下端设有变足机构,所述主体顶面的一侧设有机械手臂。
8.所述机械腿包括摇摆电机、摇摆连杆、大腿件和小腿件,所述直接的外侧分别固定安装摇摆电机,所述摇摆电机的外周转动连接大腿件的一端,所述大腿件的另一端铰接连接小腿件,所述主动关节摇摆电机的输出端与大腿件前面一侧的上部通过摇摆连杆连接,所述摇摆连杆、大腿件和小腿件构成曲柄摇杆机构。
9.所述主体内部设有处理器、信号接收器以及电源。
10.还包括远程控制装置。
11.所述主体上设有体温测量装置、心率检测装置、血压检测装置及血糖检测装置。
12.所述变足机构包括u型架,所述机械腿的下端固定安装u型架,所述u型架内转动安装转轴,所述转轴的外周固定安装呈圆周阵列分布的钉盘、滚轮、吸盘,所述u型架的内侧分别固定安装自锁电机,所述自锁电机的输出端分别与相应的转轴的内端固定连接。
13.所述主体的前面设有激光测距装置。
14.对比现有技术,本发明的有益效果是:
15.本装置在使用时,通过机械腿底部的变足机构,能够使本装置适应光滑地面、松软
地面及粗糙地面,大大提高本装置的行动能力,增加了本装置的实用性,提高了本装置的稳定性,方便使用。
附图说明
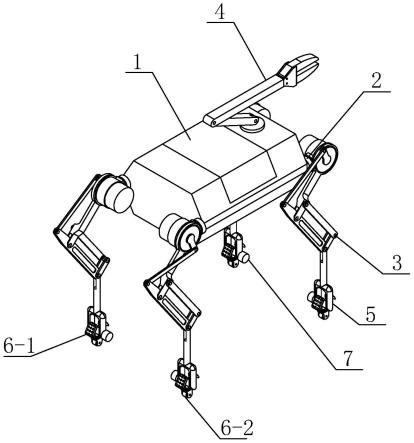
16.图1是本发明结构示意图;
17.图2是本发明侧视结构的三维示意图;
18.图3是本发明的主视图;
19.图4是本发明变足机构的结构示意图。
20.附图中所示标号:1、主体;2、支架;3、机械腿;3-1、摇摆电机;3-2、摇摆连杆;3-3、大腿件;3-4、小腿件;4、机械手臂;5、u型架;6、转轴;6-1、钉盘;6-2、滚轮;6-3、吸盘;7、自锁电机。
具体实施方式
21.结合附图和具体实施例,对本发明作进一步说明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所限定的范围。
22.实施例:一种仿生陪伴机器人
23.如图1-4所示,一种仿生陪伴机器人,其具体结构包括:
24.主体1,所述主体1两侧的前部和后部分别固定安装支架2,所述支架2上均设有带有驱动装置的机械腿3,所述机械腿3的下端设有变足机构,所述主体1顶面的一侧设有机械手臂4。
25.所述机械腿3包括摇摆电机3-1、摇摆连杆3-2、大腿件3-3和小腿件3-4,所述直接2的外侧分别固定安装摇摆电机3-1,所述摇摆电机3-1的外周转动连接大腿件3-3的一端,所述大腿件3-3的另一端铰接连接小腿件3-4,所述主动关节摇摆电机3-1的输出端与大腿件3-3前面一侧的上部通过摇摆连杆3-2连接,所述摇摆连杆3-2、大腿件3-3和小腿件3-4构成曲柄摇杆机构。本装置将摇摆电机集中设置在支架2的位置,能够降低大腿件3-3和小腿件3-4组件的负重,能够增强腿部组件活动的灵活性,实现机器人的轻便化,有利于运动和平衡的控制。
26.所述主体1内部设有处理器、信号接收器以及电源,所述处理器、信号接收器均与电源电性连接。本装置在使用时,可通过处理器和信号接收器之间的相互配合,便于使用者进行操控。
27.还包括远程控制装置。此结构设计在使用时,能够方便使用者对本装置进行远程控制。
28.所述主体1上设有体温测量装置、心率检测装置、血压检测装置及血糖检测装置。此结构设计能够方便本装置对使用者的健康状况进行检测。
29.所述变足机构包括u型架5,所述机械腿3的下端固定安装u型架5,所述u型架5的开口朝下,所述u型架5内转动安装转轴6,所述转轴6的外周固定安装呈圆周阵列分布的钉盘6-1、滚轮6-2、吸盘6-3,所述u型架5的内侧分别固定安装自锁电机7,所述自锁电机7的输出端分别与相应的转轴6的内端固定连接。本装置在使用时,使用者通过自锁电机7输出轴的
转动,能够使自锁电机7的输出轴带动与之连接的转轴6同步转动,通过转轴6的转动使钉盘6-1或滚轮6-2或吸盘6-3能够与地面接触,钉盘6-1适用于草地等柔软地面,滚轮6-2适用于水泥等粗糙路面,吸盘6-3适用于瓷砖等光滑地面,使用者可根据地面路况选择钉盘6-1或滚轮6-2或吸盘6-3与底面接触,提高本装置的稳定性。
30.所述主体1的前面设有激光测距装置,所述激光测距装置与处理器电性连接。通过激光测距装置与处理器之间的协同配合,能够便于本装置对行进路线进行合理规划,并躲避障碍物。
31.本装置在生产时可使用模仿动物皮毛的材料来制作主体1的外壳将其覆盖在主体1和机械腿3的表面,并在主体1的一侧制作尾巴,可使用与灰色哈士奇或波斯猫十分相近的毛色,用于模拟宠物的外形,提高本装置的仿真性,采用圆润的造型降低视觉上的攻击性。
32.本装置在使用时通过机械腿3进行行走,通过变足机构改变机械腿3底部的形状,使本装置能够适应不同路况,提高本装置的稳定性,方便使用。
33.通过实时健康监测,结合体温、心率、血压、血糖等多项健康指标,机器人对用户的健康状况做出评估,并根据指标的波动情况预测可能发生的不健康状况,并向用户给出针对性的意见,以达到健康预警的目的;同时可在本装置主体1内安装实时定位系统,结合用户的日常活动范围,建立防丢失与预警机制,在用户脱离日常活动区间时,及时向紧急联系人报警,并记录用户运动轨迹;通过智能语音交互系统,实现人机交流,扮演用户助手的角色;通过仿生系统,模仿宠物的肢体动作及生活习性,作为机器宠物,从在精神上缓解用户孤独、焦虑的内心感受,达到辅助心理康复的效果。
34.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1