一种有人无人双模并联线控底盘系统的制作方法
1.本发明涉及车辆底盘系统的技术领域,具体涉及一种有人无人双模并联线控底盘系统。
背景技术:
2.当前无人驾驶相关技术蓬勃发展,线控底盘为无人车辆的关键技术之一;受限于当前的视觉传感器技术或成本因素,大多数无人车辆的行驶速度在10km以下,且大多不具备有人驾驶功能,对要求产品快速转移或搬运时造成极大的不便,而目前无人车辆也大多存在无人驾驶和有人驾驶无法兼容的问题。
技术实现要素:
3.本发明的目的在于:针对目前无人车辆也大多存在无人驾驶和有人驾驶无法兼容的问题,提供了一种有人无人双模并联线控底盘系统,解决了车辆无人驾驶和有人驾驶兼容的问题,使车辆具备骑乘功能,同时实现快速转移。
4.本发明的技术方案如下:
5.一种有人无人双模并联线控底盘系统,包括:车架、线控系统、有人无人双模转向系统、有人无人双模传动系统、有人无人双模制动系统;
6.所述线控系统包括:工控机和整车控制器vcu;整车控制器vcu将工控机发出的控制指令转换为各系统可以识别的信号或指令实现对各系统的控制;
7.所述有人无人双模转向系统包括:操纵装置、转向传动机构、转向执行装置;所述操纵装置包括:人工模式下的车把和无人模式下的转向电机;所述转向传动机构与所述操纵装置连接,起转向扭矩传输作用;所述转向执行装置将转向传动机构和轮胎总成进行连接;所述操纵装置输出的转向扭矩通过转向传动机构传输至转向执行装置,由转向执行装置带动轮胎总成完成转向动作;
8.所述有人无人双模传动系统包括:驱动电机和车把油门;所述驱动电机通过链传动和差速器与驱动轮胎总成连接,用于驱动轮胎总成运转;所述驱动电机可由车把油门和线控系统控制;
9.所述有人无人双模制动系统包括:人工模式下的制动手柄、无人模式下的制动电机和油泵总成、制动执行元件;通过制动手柄可控制制动执行元件进行制动、通过制动电机驱动油泵总成可控制制动执行元件制动。
10.进一步地,所述转向传动机构包括:上转向柱、下转向柱、传动齿轮组、转向摆臂、转向拉杆;
11.所述上转向柱一端与车把连接,另一端通过联轴器与下转向柱连接;所述上转向柱将车把的转向扭矩通过联轴器传递至下转向柱;
12.所述转向电机通过传动齿轮组与下转向柱传动;所述转向电机提供的转向扭矩通过传动齿轮组传递至下转向柱;
13.所述下转向柱与转向摆臂连接,所述转向摆臂与转向拉杆连接,所述转向拉杆与转向执行装置连接;所述转向扭矩从下转向柱依次通过转向摆臂和转向拉杆传递至转向执行装置,再由转向执行装置带动轮胎总成完成转向动作。
14.进一步地,所述有人无人双模转向系统还包括转向电机控制器;
15.所述整车控制器vcu接收工控机的转向指令,并向转向电机控制器发送转向指令;
16.所述转向电机控制器将整车控制器vcu的转向指令传递至转向电机,控制转向电机的转动。
17.进一步地,所述有人无人双模转向系统还包括:转向电机控制值计算系统;所述转向电机控制值计算系统用于计算转向电机控制值;
18.所述转向电机控制值计算系统包括:车速传感器和转向量检测传感器、转向角传感器;
19.所述车速传感器用于监测转向电机的转速;
20.所述转向量检测传感器用于监测转向电机实际的转向绝对值;
21.所述转向角传感器用于监测当前转向角;
22.所述工控机向整车控制器vcu传递的转向指令包括期望转向角;所述整车控制器vcu根据期望转向角、当前转向角、当前转向电机的转速和当前转向电机实际的转向绝对值,计算出转向电机控制值,并将该转向电机控制值同转向指令一同发送至转向电机控制器,由转向电机控制器控制转向电机运动。
23.进一步地,所述链传动包括:一级链传动和二级链传动;
24.所述驱动电机的输出轴通过一级链传动与差速器连接,所述驱动电机输出的输出扭矩传递至差速器;
25.所述差速器上的差速器输出轴通过二级链传动与轮胎总成连接,所述差速器输出的输出扭矩传递至轮胎总成,驱动轮胎总成运转;
26.所述有人无人双模传动系统还包括:车速传感器,所述车速传感器用于检测车轮转速,并换算成车辆行驶速度,为整车控制器vcu提供车辆行驶的速度参数。
27.进一步地,所述制动执行元件为盘式制动器;所述盘式制动器包括制动钳和制动盘;
28.所述制动手柄上设置有手动卡销,通过手动卡销使制动手柄固定于工作状态下,实现人工驻车制动。
29.进一步地,所述有人无人双模制动系统还包括油压传感器;所述油压传感器用于检测制动管路中的制动液压力,通过计算得出实际制动力并反馈给整车控制器vcu,整车控制器vcu根据反馈对制动电机的控制进行调整。
30.进一步地,还包括:前悬挂系统和后悬挂系统;
31.所述前悬挂系统包括:起减震作用的前轮减震装置、用于吸收和抵消横向力的a臂、转向节、前轮;所述a臂的一端与车架铰链连接,另一端与转向节铰链连接;所述转向节与前轮连接;所述前轮减震装置的一端与车架铰链连接,另一端与a臂的另一端固定连接;
32.所述后悬挂系统包括:起减震作用的后轮减震装置、后平叉、后轮;所述后平叉与车架固定连接,后平叉用于固定后轮和安装减震装置;所述后轮减震装置设置在车架与后平叉之间。
33.进一步地,所述a臂包括:第一a臂和第二a臂,所述第一a臂和第二a臂的一端均与车架铰链,且第二a臂位于第一a臂下方;所述前轮减震装置的另一端与第一a臂的另一端固定连接。
34.进一步地,还包括:综合电源,所述综合电源负责整车的电源供配电管理,由工控机控制。
35.与现有的技术相比本发明的有益效果是:
36.1、一种有人无人双模并联线控底盘系统,通过线控系统对有人无人双模转向系统、有人无人双模传动系统、有人无人双模制动系统进行控制调配,在无车车辆的基础上实现了有人驾驶,解决车辆无人驾驶和有人驾驶兼容的问题,使车辆具备骑乘功能,实现快速转移。
37.2、一种有人无人双模并联线控底盘系统,线控底盘采用纯电动四轮结构平台,结构形式参考四轮摩托,前轮转向、后轮驱动、中置电机、前后均为独立悬挂,具有动力强劲、行驶平顺、操纵稳定、通过性高等特点。
38.3、一种有人无人双模并联线控底盘系统,前悬挂系统采用双叉臂式独立悬挂结构,车轮既可随转向节转动,也可随a臂上下跳动;前轮减震装置的下端联接上第一a臂,上端联接车架,起到支撑车体和缓冲减振的作用;由于双叉臂悬架的第一a臂和第二a臂抵消了横向作用力,使车辆能在弯道上具有较好的方向稳定性;后悬挂系统采用单纵臂式独立悬挂,类似摩托车后摇臂,后轮减震装置通过上支点与车架铰接,通过下支点与平叉铰接,起到支撑车体和缓冲减振的作用,特点是结构简单,可靠性高。
附图说明
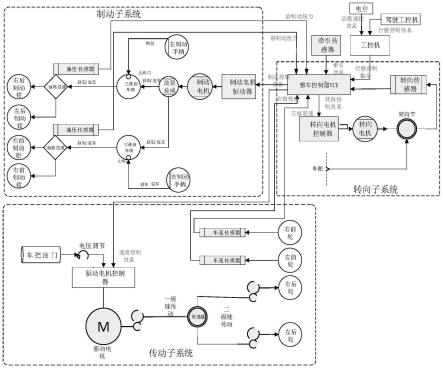
39.图1为一种有人无人双模并联线控底盘系统中线控系统的原理示意图;
40.图2为一种有人无人双模并联线控底盘系统的结构示意图;
41.图3为一种有人无人双模并联线控底盘系统中有人无人双模转向系统的结构示意图;
42.图4为一种有人无人双模并联线控底盘系统中有人无人双模转向系统的组成示意图;
43.图5为转向节的结构示意图;
44.图6为转向拉杆的结构示意图;
45.图7为十字万向节的结构示意图;
46.图8为最小转向半径计算示意图;
47.图9为一种有人无人双模并联线控底盘系统中有人无人双模传动系统的结构示意图;
48.图10为有人无人双模传动系统的动力传输路线图;
49.图11为有人无人双模制动系统的组成示意图;
50.图12为有人无人双模制动系统的制动流程图;
51.图13为制动手柄的结构示意图;
52.图14为有人无人双模制动系统中制动电机和油泵总成的模型图;
53.图15为前悬挂系统的结构示意图;
54.图16为后悬挂系统的结构示意图;
55.附图标记:1-显示屏,2-前悬挂系统,3-车把,4-车架,5-油泵总成,6-综合电源,7-网络交换机,8-有人无人双模传动系统,9-后悬挂系统,10-工控机,11-前制动钳总成,12-前轮,13-油压传感器,14-蓄电池,15-后制动钳总成,16-车速传感器,17-后轮,18-上转向柱,19-联轴器,20-下转向柱,21-传动齿轮组,22-转向摆臂,23-转向拉杆,24-转向节,25-转向电机,27-转向量检测传感器,28-转向电机控制器,29-驱动电机控制器,30-车把油门,31-一级链传动,32-差速器,33-二级链传动,34-驱动电机,35-手动卡销,36-制动电机,37-前轮减震装置,38-第一a臂,39-第二a臂,40-后轮减震装置,41-后平叉。
具体实施方式
56.需要说明的是,术语“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
57.下面结合实施例对本发明的特征和性能作进一步的详细描述。
58.实施例一
59.请参阅图1-16,一种有人无人双模并联线控底盘系统,具体包括:车架4、线控系统、有人无人双模转向系统、有人无人双模传动系统8、有人无人双模制动系统;优选地,所述车架4作为衔接各系统和设备的安装载体,采用型材焊接而成;所述底盘系统为四轮底盘,分别为两个前轮12和两个后轮17,所述前轮12承受整车重量,传递牵引力、制动力、驱动扭矩和制动扭矩;缓解和吸收路面不平整带来的冲击和振动;提高车辆与地面的附着力,所述后轮17承受整车重量,传递牵引力、制动力、驱动扭矩和制动扭矩;缓解和吸收路面不平整带来的冲击和振动;提高车辆与地面的附着力;
60.所述线控系统包括:工控机10和整车控制器vcu;整车控制器vcu将工控机10发出的控制指令转换为各系统可以识别的信号或指令实现对各系统的控制;优选地,所述各系统之间以及与整车控制器vcu之间通过can总线进行连接;所述工控机10通过can总线向整车控制器vcu发送速度、档位、制动和转向等控制指令,整车控制器vcu将速度、转向和制动等控制指令转换为各系统可以识别的信号或指令实现对各系统的控制;整车控制器vcu同时采集车辆车速、档位、各类传感器等状态信息发送至can总线上供工控机10使用;
61.所述有人无人双模转向系统包括:操纵装置、转向传动机构、转向执行装置;所述操纵装置包括:人工模式下的车把3和无人模式下的转向电机25;所述转向传动机构与所述操纵装置连接,起转向扭矩传输作用;所述转向执行装置将转向传动机构和轮胎总成进行连接(实质上就是与前轮12连接);所述操纵装置输出的转向扭矩通过转向传动机构传输至转向执行装置,由转向执行装置带动轮胎总成完成转向动作;优选地,在人工模式下,操作人员双手紧握车把3,按所需方位旋转车把3,通过扭矩传递带动前轮12转向即可;所述轮胎总成用于支撑车辆,实现车辆运动;所述转向执行装置为转向节24;转向节24的作用是传递
并承受车辆前部载荷,支撑并带动前轮12转动而使车辆实现转向;
62.所述有人无人双模传动系统8包括:驱动电机34和车把3油门;所述驱动电机34通过链传动和差速器32与驱动轮胎总成连接,用于驱动轮胎总成运转(即驱动后轮17运转);所述驱动电机34可由车把3油门和线控系统控制;
63.所述有人无人双模制动系统包括:人工模式下的制动手柄、无人模式下的制动电机36和油泵总成5、制动执行元件;通过制动手柄可控制制动执行元件进行制动、通过制动电机36驱动油泵总成5可控制制动执行元件制动;有人无人双模制动系统的作用是确保可以随意使行驶中的车辆减速或者停车、并且能使驻车中的车辆保持不动。
64.在本实施例中,具体的,还包括:前悬挂系统2和后悬挂系统9;优选地,本实施例中提出的前悬挂系统2和后悬挂系统9是为了确保车辆行驶平顺和操纵稳定的重要总成,能够传递车辆的力和力矩、缓和冲击、衰减震动的作用;具体采用四轮独立悬挂机构,主要优点是各轮单独跳动,减少互相影响,使车辆与地面更好的接触,降低车身的倾斜和振动,降低非簧载质量,减轻地面起伏变化带来的冲击,保护车内设备;
65.所述前悬挂系统2包括:起减震作用的前轮减震装置37、用于吸收和抵消横向力的a臂、转向节24、前轮12;所述a臂的一端与车架4铰链连接,另一端与转向节24铰链连接;所述转向节24与前轮12连接;所述前轮减震装置37的一端与车架4铰链连接,另一端与a臂的另一端固定连接;
66.所述后悬挂系统9包括:起减震作用的后轮减震装置40、后平叉41、后轮17;所述后平叉41与车架4固定连接,后平叉41用于固定后轮17和安装减震装置;所述后轮减震装置40设置在车架4与后平叉41之间;优选地,所述前轮减震装置37和后轮减震装置40,均为弹簧减震器。
67.在本实施例中,具体的,所述a臂包括:第一a臂38和第二a臂39,所述第一a臂38和第二a臂39的一端均与车架4铰链,且第二a臂39位于第一a臂38下方;所述前轮减震装置37的另一端与第一a臂38的另一端固定连接;即呈双叉臂结构,进一步抵消了横向作用力,使车辆能在弯道上具有较好的方向稳定性。
68.在本实施例中,所述前悬挂系统2采用双叉臂式独立悬挂结构,车轮既可随转向节24转动,也可随a臂上下跳动;前轮减震装置37的下端联接上第一a臂38,上端联接车架4,起到支撑车体和缓冲减振的作用;由于双叉臂悬架的第一a臂38和第二a臂39抵消了横向作用力,使车辆能在弯道上具有较好的方向稳定性。
69.在本实施例中,后悬挂系统9采用单纵臂式独立悬挂,类似摩托车后摇臂,后轮减震装置40通过上支点与车架4铰接,通过下支点与平叉铰接,起到支撑车体和缓冲减振的作用,特点是结构简单,可靠性高。
70.在本实施例中,给出了前悬挂系统2和后悬挂系统9的某种具体设计参数。
71.表1悬架主要设计参数表
[0072][0073][0074]
在本实施例中,具体的,还包括:综合电源6,所述综合电源6负责整车的电源供配电管理,由工控机10控制;优选地,其实质上还可以设置相应的蓄电池14,为各电机和车载设备进行供电,蓄电池14输出分为两路,一路直接给各电机供电,另一路连接综合电源6,综合电源6完成输出电压制式变换和功率匹配,并提供串口控制协议。
[0075]
相应的,在本实施例中,还可以设计相应的显示屏1,用于显示车辆信息,同时还可以设计网络交换机7,用于车辆内的信息交互。
[0076]
实施例二
[0077]
实施例二是对实施例一的进一步说明,相同的部件这里不再赘述,请参阅图3-8,有人无人双模转向系统的主要作用是改变或恢复车辆的行驶方向,保证车辆能够按驾驶员的意志进行转向行驶,
[0078]
转向传动机构包括:上转向柱18、下转向柱20、传动齿轮组21、转向摆臂22、转向拉杆23;所述上转向柱18一端与车把3连接,另一端通过联轴器19与下转向柱20连接;所述上转向柱18将车把3的转向扭矩通过联轴器19传递至下转向柱20;所述转向电机25通过传动齿轮组21与下转向柱20传动;所述转向电机25提供的转向扭矩通过传动齿轮组21传递至下转向柱20;所述下转向柱20与转向摆臂22连接,所述转向摆臂22与转向拉杆23连接,所述转向拉杆23与转向执行装置连接;所述转向扭矩从下转向柱20依次通过转向摆臂22和转向拉杆23传递至转向执行装置,再由转向执行装置带动轮胎总成完成转向动作,即由转向节24带动轮胎总成完成转向动作。
[0079]
图5为转向节24的结构示意图,其中,转向节24的功用是传递并承受车辆前部载荷,支承并带动前轮12转动而使车辆转向;在车辆行驶状态下,它承受着多变的冲击载荷,需要具有很高的强度;为使内外侧转向轮符合阿克曼转向,转向节24上的转向拉杆23设置成一定角度并可调节长短,左右转向拉杆23成梯形布置。
[0080]
图6为转向拉杆23的结构示意图,其中,转向拉杆23除了要满足左右转向外,还必须使悬架上下运动和转向不发生干涉;因此转向拉杆23两端通过螺纹连接有球铰接头,以保证多自由度的连接,另外可以通过调节螺纹结合部分长度来调整转向拉杆23长度。
[0081]
图7为十字万向节的结构示意图,其中,由于上转向柱18和下转向柱20非同轴布置,两者轴线有一定角度,因此在两者之间布置十字轴式万向节;该万向节允许被连接的两轴之间有一定夹角。
[0082]
图8为最小转向半径的计算示意图,在本实施例中,最小转向半径为:
[0083]rmin
=l/sinθ0+a=1300/sin25
°
+110=3186
[0084]
式中:l为轴距(mm),θ0为外侧转向轮转向角(本实施例定为25
°
),a为轮胎中心面到主销中心线的距离。
[0085]
本实施例中,提供的有人无人双模转向系统,在人工操纵模式下,当车辆转向时驾驶员对车把3施加一个转向扭矩,该转向扭矩通过上转向柱18、下转向柱20、转向摆臂22、转向拉杆23传递至转向节24,从而使转向节24制成的转向轮偏转;无人模式与人工操纵模式的主要区别在于:转向扭矩是由转向电机25输出,并经传动齿轮组21传递给下转向柱20;优选地,所述传动齿轮组21采用大小齿轮组合,实现增力减速的作用。
[0086]
在本实施中,具体的,所述有人无人双模转向系统还包括转向电机25控制器;
[0087]
所述整车控制器vcu接收工控机10的转向指令,并向转向电机25控制器发送转向指令;
[0088]
所述转向电机25控制器将整车控制器vcu的转向指令传递至转向电机25,控制转向电机25的转动。
[0089]
所述有人无人双模转向系统还包括:转向电机25控制值计算系统;所述转向电机25控制值计算系统用于计算转向电机25控制值;
[0090]
所述转向电机25控制值计算系统包括:车速传感器16和转向量检测传感器27、转向角传感器;
[0091]
所述车速传感器16用于监测转向电机25的转速;
[0092]
所述转向量检测传感器27用于监测转向电机25实际的转向绝对值;
[0093]
所述转向角传感器用于监测当前转向角;
[0094]
所述工控机10向整车控制器vcu传递的转向指令包括期望转向角;所述整车控制器vcu根据期望转向角、当前转向角、当前转向电机25的转速和当前转向电机25实际的转向绝对值,计算出转向电机25控制值,并将该转向电机25控制值同转向指令一同发送至转向电机25控制器,由转向电机25控制器控制转向电机25运动。
[0095]
本实施例基于上述有人无人双模转向系统,还提出了一种有人无人双模转向控制方法,包括:
[0096]
步骤s1:通过工控机10在人工模式和无人模式之间进行切换;
[0097]
步骤s2:工控机10根据不同的模式选择,确定是否关闭转向供电通道;
[0098]
其中:
[0099]
人工模式下,工控机10发送关闭转向供电通道指令,使转向电机25处于关闭状态,通过车把3转动方向;
[0100]
无人模式下,工控机10发送开启转向供电通道指令,使转向电机25处于打开状态,并发送转向指令,由转向电机25转动方向。
[0101]
在本实施例中,具体的,所述无人模式下,还包括:
[0102]
步骤a:工控机10向综合电源6发送”开启转向供电通道”指令,并向整车控制器vcu发送期望转向角;
[0103]
步骤b:整车控制器vcu根据期望转向角、当前转向角、当前转向电机25的转速和当前转向电机25实际的转向绝对值,计算出转向电机25控制值,并将该控制值发送到转向电机25控制器;
[0104]
步骤c:转向电机25控制器根据接收到的转向电机25控制值,控制转向电机25运转,从而转动方向。
[0105]
在本实施例中,具体的,所述转向供电通道为综合电源6的一条供电路径,实质上就是综合电源6为转向电机25、车速传感器16、转向量检测传感器27等与无人模式相关部件供电。
[0106]
实施例三
[0107]
实施例三是对实施例一的进一步说明,相同的部件这里不再赘述,图10为传递系统的动力传递路线图,有人无人双模传动系统8中,所述链传动包括:一级链传动31和二级链传动33;所述驱动电机34选用72v永磁同步电机,驱动电机34可以从静止状态开始正转或反转,并且能在较宽速度范围内进行有效的工作,因此单一的传动比可以满足电机转速与车轮速度的匹配;在本实施例中,采用二级传动,其传动比根据驱动电机34和车速计算匹配,其为固定传动比传动,传动样式简单可靠,便于维修和根据需要调整传动比;
[0108]
所述驱动电机34的输出轴通过一级链传动31与差速器32连接,所述驱动电机34输出的输出扭矩传递至差速器32;
[0109]
所述差速器32上的差速器32输出轴通过二级链传动33与轮胎总成连接,所述差速器32输出的输出扭矩传递至轮胎总成,驱动轮胎总成运转;
[0110]
所述有人无人双模传动系统8还包括:车速传感器16,所述车速传感器16用于检测车轮转速,并换算成车辆行驶速度,为整车控制器vcu提供车辆行驶的速度参数。
[0111]
在本实施例中,操作人员根据需求通过工控机10选择有人模式或无人模式;
[0112]
当选择有人模式时,工控机10向综合电源6发送关闭供电通道指令,即关闭整车控制器vcu的供电,操作人员通过扭动车把3油门,发送指令至驱动电机34控制器29,从而控制车辆运动。
[0113]
当选择无人模式时,工控机10向综合电源6发送开启供电通道指令,即为整车控制器vcu供电,通过因为是无人模式,此时车把3油门是不会被扭动的,因此可通过工控机10向整车控制器vcu发送期望速度,整车控制器vcu根据期望速度,将其通过指令发送到驱动电机34控制器29;然后驱动电机34控制器29根据接收到的控制指令,控制驱动电机34运动,从而控制车辆运动。
[0114]
实施例四
[0115]
实施例四是对实施例一的进一步说明,相同的部件这里不再赘述,请参阅图11-14,有人无人双模制动系统中的制动执行元件为盘式制动器;所述盘式制动器包括制动钳和制动盘;优选地,所述制动钳包括:前制动钳总成11、后制动钳总成15,所述前制动钳总成11、后制动钳总成15用于对前轮12和后轮17进行制动,两前轮12各配一套前制动钳总成11,同时工作,两后轮17各配一套后制动钳总成15,同时工作;所述制动盘包括:前制动盘和后制动盘,所述前制动盘和后制动盘分别与前轮12和后轮17的轮毂用螺栓固定联接,制动时被制动钳的刹车片夹持,产生制动力;
[0116]
在本实施例中,具体的,请参阅图13,图13为制动手柄的结构示意图;所述制动手柄上设置有手动卡销35,通过手动卡销35使制动手柄固定于工作状态下,实现人工驻车制动。
[0117]
制动操纵实质上分为人工操纵和线控操纵两种模式;制动手柄安装于车把3两端,手动操作所产生的输入力经杠杆比放大、传递给制动油缸,再转换成液压制动力;人工驻车制动是通过手动卡销35将制动手柄保持固定于工作状态下,从而保证液压制动力长时间存在。
[0118]
线控操纵下,由制动电机36驱动油泵总成5产生液压制动力;优选地,所述油泵总成5可以双油路输出,油路分别通向前后制动钳。
[0119]
在本实施例中,选用的盘式制动器的具体参数如下表:
[0120]
表2盘式制动器参数表
[0121][0122]
在本实施例中,具体的,所述有人无人双模制动系统还包括油压传感器13;所述油压传感器13用于检测制动管路中的制动液压力,通过计算得出实际制动力并反馈给整车控制器vcu,整车控制器vcu根据反馈对制动电机36的控制进行调整。
[0123]
在本实施例中,具体的,图11还给出了有人无人双模制动系统的组成示意图。在本实施例中,具体的,图12基于有人无人双模制动系统,给出了制动流程图。
[0124]
实施例五
[0125]
实施例五是对实施例一的进一步说明,相同的部件这里不再赘述,请参阅图1,图1为线控系统的原理示意图;图中的转向传感器包括:车速传感器16和转向量检测传感器27、转向角传感器;同时可以由驾驶工控机10传递行驶控制信息或由电台远程传递信息至工控机10,进行各系统间的调配;还包括牵引传感器,用于回去牵引信息,并发送至整车控制vcu;针对于有人无人双模制动系统,实质上还包括用于驱动制动电机36的制动电机36驱动器,所述制动电机36驱动器根据整车控制器vcu的控制,驱动制动电机36;针对于有人无人双模传动系统8,实质上还包括用于驱动驱动电机34的驱动电机34控制器29,所述驱动电机
34控制器29根据整车控制器vcu的控制,驱动驱动电机34。在本实施例中,针对于线控系统的实际使用情况,还给出了其性能参数表。
[0126]
表3线控系统性能参数表
[0127][0128][0129]
以上所述实施例仅表达了本技术的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术保护范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术技术方案构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1