一种自动控制平衡的车用运载平台
1.本实用新型涉及轨道交通装备技术领域,尤其涉及一种自动控制平衡的车用运载平台。
背景技术:
2.工厂车间内运输各类物料往往用到运载平台,但目前已有的运载平台仅仅是为了在工厂车间内能够方便运输,而没有考虑运输平稳状态。当运输一些紧密部件时,依旧需要人工搬运或者使用联动机械臂搬运,然而人工搬运的搬运重量有限,而且搬运途中的不确定因素过多,而联动机械臂搬运的运动范围有限,无法满足物料的长距离运送。同时有部分中小型企业由于地面平整度较差,导致这类企业无法引入当前已有的运载平台。
技术实现要素:
3.本实用新型的目的是针对现有的运载平台在运输过程中稳定性较差,无法运输精密度较高的仪器的问题,提出一种自动控制平衡的车用运载平台。
4.本实用新型的技术方案:一种自动控制平衡的车用运载平台,包括运载平台、陀螺仪模块和履带动力系统,所述运载平台是由平面支架、履带底盘、电池架、垂直支架和自由度平台拼接组成的,所述陀螺仪模块安装在自由度平台的下承载面上,用以检测车体当前的倾斜度,所述陀螺仪模块通过自由度平台上台面安装在自由度平台上,所述履带动力系统安装在履带底盘上,所述运载平台的底部安装有自动循迹系统,所述履带底盘的前部安装有自动避让系统,且履带底盘上方安装有用以分出多股导线的分线器。
5.优选的,所述自由度平台上安装有舵机,所述舵机连接有六根连杆,所述连杆的顶部与自由度平台上台面连接,通过舵机为自由度平台通过动力,所述平面支架安装有控制板和降压模块,所述自由度平台与履带底盘之间通过一根半角螺栓进行连接。
6.优选的,所述履带动力系统包括安装在履带底盘上的两对主动轮和八对从动轮,所述履带底盘通过螺栓连接有减速电机,所述减速电机的输出端通过电机轴套与主动轮连接,所述主动轮和从动轮通过塑料履带连接。
7.优选的,所述自动循迹系统包括传感器,所述传感器通过双通铜柱安装在履带底盘的底部,且传感器采用数字量输出。
8.优选的,所述自动避让系统包括安装在平面支架上用于测距的超声波模块,该模块的公式为:测试距离=/2,所述履带底盘的底部安装有步进电机控制板、变压模块、wifi模块、拓展板、主控板和电源单极恒流模块。
9.与现有技术相比,本实用新型具有如下有益的技术效果:
10.本实用新型相较于现在市面上已有的运载平台,运载过程中平稳度更强,能有效的防止工厂内使用运载平台运送物料时,由于运载平台颠簸而造成物料损坏,同时本实用新型相较于已有的运载平台,对工厂内地面环境要求低,不必对工厂地面环境做特殊处理,便可将本实用新型的运载平台投入使用。
附图说明
11.图1是自动控制平衡的车用运载平台的仰视图;
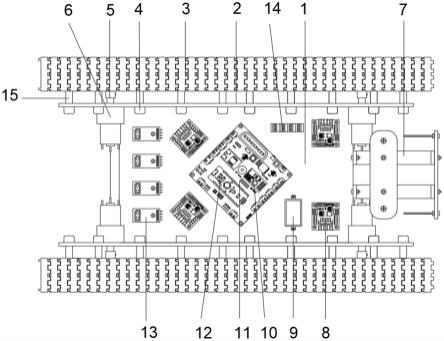
12.图2是图1所示的俯视图;
13.图3是图1所示的左视图。
14.附图标记:1、平面支架;2、底盘;3、塑料履带;4、内六方螺丝;5、电机轴套;6、减速电机;7、电池架;8、步进电机控制板;9、变压模块;10、 wifi模块;11、拓展板;12、主控板;13、传感器;14、电源单极恒流模块;15、主动轮;16、从动轮;17、双通铜柱;18、自由度平台上台面;19、半角螺栓;20、舵机;21分线器;22、垂直支架;23、自由度平台;24、陀螺仪模块;25、控制板;26、降压模块;27、超声波模块。
具体实施方式
15.下文结合附图和具体实施例对本实用新型的技术方案做进一步说明。
16.实施例一
17.如图1-3所示,本实用新型提出的一种自动控制平衡的车用运载平台,包括运载平台、陀螺仪模块24和履带动力系统,其特征在于,所述运载平台是由平面支架1、履带底盘2、电池架7、垂直支架22和自由度平台23拼接组成的,所述陀螺仪模块24安装在自由度平台23的下承载面上,陀螺仪模块24的型号为mpu6050,用以检测车体当前的倾斜度,所述陀螺仪模块24通过自由度平台上台面18安装在自由度平台23上,所述履带动力系统安装在履带底盘2上,陀螺仪模块24将数据发送给控制板25并分析,控制板25将计算结果发送给自由度平台23,并对自由度平台23的各个舵机20进行调整,使运载平台的自由度平台上台面18时刻处于平衡状态,所述运载平台的底部安装有自动循迹系统,所述履带底盘2的前部安装有自动避让系统,且履带底盘2上方安装有用以分出多股导线的分线器21,所述自由度平台23上安装有舵机20,所述舵机20连接有六根连杆,所述连杆的顶部与自由度平台上台面18连接,通过舵机20为自由度平台23通过动力,所述平面支架安装有控制板25和降压模块26,降压模块26的型号为dc-dc,控制板25的型号为stewart,利用控制板25采集陀螺仪模块24的数据,并控制自由度平台23的自由度平台上台面18的倾斜度,所述自由度平台23与履带底盘2之间通过一根半角螺栓19进行连接,所述自动循迹系统包括传感器13,所述传感器13通过双通铜柱安装在履带底盘2的底部,且传感器13采用数字量输出,传感器13的型号为tcrt5000。
18.本实施例中,工作电压3.3-5v,检测反射距离1mm-25mm,比较器输出15ma,小板pcb尺寸32mm*14mm,四个传感器13均采用并联方式连接到拓展板11上,数据经拓展板11传输给主控板12,使用四根双通铜柱17将传感器13架空,使其更贴近与地面,四个传感器12共分两组,外部两个为一组,内部两个为一组,路面采用50mm黑色感应带作为传感器13的捕捉对象,内侧两个传感器13若检测到黑色信号,则运载平台正常运行,若外侧传感器13接收到黑色信号或接收不到黑色信号,则运载平台进行小范围内无规则运行,以捕捉信号,若长时间无法捕捉到信号,运载平台报错并停止运行;运载平台具有自动导航功能,该功能使用wifi模块10与减速电机6相互配合计算共同完成,自动导航系统首先将运行车间环境输入至运载平台的主控板12进行分析,使主控板12对所处环境有一个大概模型框架。四个减速电机6的尾部均装配有一个编码器,运载平台运行时,减速电机6尾部编码器的数据通过四根数据
排线上传至主控板12,通过将编码器上传的数据与主控板12中的模型框架相结合,从而得知运载平台目前在车间内所处的位置。
19.实施例二
20.如图3所示,本实用新型提出的一种自动控制平衡的车用运载平台,相较于实施例一,本实施例还包括安装在履带底盘2上的两对主动轮15和八对从动轮16,所述履带底盘2通过螺栓连接有减速电机6,所述减速电机6的输出端通过电机轴套与主动轮15连接,所述主动轮15和从动轮16通过塑料履带3连接。
21.本实施例中,减速电机6的参数:电压12v,电流0.5a,功率10w,转速 30-300转,重量280g,电机尺寸37*58mm,出轴尺寸6*15mm。将四个减速电机6使用两枚m3*8螺丝固定于铝合金车体的四个立面,减速电机6的转轴连接直径44mm,齿深3mm,齿槽宽6.5mm,位于内侧的主动轮15的轮片间距17mm,位于外侧的主动轮15的轮片间距21mm,位于内侧的从动轮16间距17mm,位于外侧的从动轮16间距21mm。运载平台每侧使用宽度为40mm是塑料履带3使其平稳运行。
22.实施例三
23.如图2所示,本实用新型提出的一种自动控制平衡的车用运载平台,相较于实施例一或实施例二,本实施例还包括安装在平面支架1上用于测距的超声波模块27,超声波模块27的型号为hy-srf05,该模块的公式为:测试距离=高电平时间*声速/2,所述履带底盘2的底部安装有步进电机控制板8、变压模块 9、wifi模块10、拓展板11、主控板12和电源单极恒流模块14,步进电机控制板8的型号为l298n,变压模块9的功率为12v-9v,拓展板11的型号为stm32,主控板12的型号为stm32。
24.本实施例中,超声波模块27对自身发出的超声波进行检测,同时超声波模块27将所接收到的数据传输给主控板12,由主控板12对超声波模块27得到的数据进行计算分析,并结合当前运载平台位置情况,对可预见的障碍物进行紧急避让或者停车,同时主控板12将会把数据发送给陀螺仪模块24,陀螺仪模块 24接收到数据并进行运算,将数据转化为指令传输给舵机20,由舵机20调整自由度平台上台面18,以保证运送的物品在运输过程中,运载平台触发紧急避障时,不会导致货物损坏。
25.实施例四
26.如图1至图3所示,本实用新型提出的一种自动控制平衡的车用运载平台,相较于实施例二或实施例三,本实施例还包括运载平台、陀螺仪模块24和履带动力系统,其特征在于,所述运载平台是由平面支架1、履带底盘2、电池架7、垂直支架22和自由度平台23拼接组成的,所述陀螺仪模块24安装在自由度平台23的下承载面上,用以检测车体当前的倾斜度,所述陀螺仪模块24通过自由度平台上台面18安装在自由度平台23上,所述履带动力系统安装在履带底盘2上,所述运载平台的底部安装有自动循迹系统,所述履带底盘2的前部安装有自动避让系统,且履带底盘2上方安装有用以分出多股导线的分线器21,所述自由度平台23上安装有舵机20,所述舵机20连接有六根连杆,所述连杆的顶部与自由度平台上台面18连接,通过舵机20为自由度平台23通过动力,所述平面支架安装有控制板25和降压模块26,所述自由度平台23与履带底盘 2之间通过一根半角螺栓19进行连接,所述履带动力系统包括安装在履带底盘 2上的两对主动轮15和八对从动轮16,所述履带底盘2通过螺栓连接有减速电机6,所述减速电机6的输出端通过电机轴套与主动轮15连接,所述主动轮15 和从动
轮16通过塑料履带3连接,所述自动循迹系统包括传感器13,所述传感器13通过双通铜柱安装在履带底盘2的底部,且传感器13采用数字量输出,所述自动避让系统包括安装在平面支架1上用于测距的超声波模块27,该模块的公式为:测试距离=高电平时间*声速/2,所述履带底盘2的底部安装有步进电机控制板8、变压模块9、wifi模块10、拓展板11、主控板12和电源单极恒流模块14。
27.本实施例中,电压分配将电流从12v电池中引出,将导线接通到二进十二出的分线器21上,将导线从分线器21的第一个端子引出,接到降压模块26上,将电压由12v降至5v,将导线由降压模块26引出,接至控制板25,为控制板 25接电,从而为自由度平台23系统供电。将导线从分线器21的第二个端子引出,接到变压模块9上,将电压由12v降至9v,用导线从变压模块9引出后接入拓展板11,拓展板11接电后将电源传送给主控板12,从而使主控板12能够运行,将导线从拓展板11上引出,正极接入步进电机控制板8的+5v端,负极接入步进电机控制板8的gnd端,使其作为步进电机控制板8的低压输入源。将导线从分线器21的第三个端子引出,正极接入步进电机控制板8的+12v端,负极接入步进电机控制板8的gnd端,使其作为步进电机控制板8的高压输入源。
28.上述具体实施例仅仅是本实用新型的几种优选的实施例,基于本实用新型的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1