一种清淤机器人的避让结构的制作方法
1.本技术涉及河湖清淤设备的领域,尤其是涉及一种清淤机器人的避让结构。
背景技术:
2.随着我国经济的快速发展和城镇化水平的不断提高,目前国内很多城市存在生活废水直排和工业污水排放等情况,排出的污染物远远超出了水环境容量,导致河流湖泊被严重污染,河道黑臭化,大量的淤泥堆积使得河道难以畅通。这不仅仅影响了河道周围的环境质量同时也影响了人民生活和工业废水的再次排放的问题。针对以上一系列问题,各城市开始开展河道水环境治理的行动.
3.随着智能化和机械化程度的提高,对于河道淤泥的处理问题,可采用机器人清淤的方式,相比于传统人工清淤具有很大的优势,不仅提高了清淤效率,还有效地减少了劳动力。然而,现有技术中的清淤机器人的越障能力比较差,当水底有建筑垃圾时,清淤机器人在行进过程中容易被卡住,需要用吊车协助转移位置,费时费力,影响工作效率。
技术实现要素:
4.为了改善上述技术问题,本技术提供一种清淤机器人的避让结构。
5.本技术提供的一种清淤机器人的避让结构,采用如下的技术方案:
6.一种清淤机器人的避让结构,包括底盘,所述底盘上设有清淤机器人本体,所述清淤机器人本体上设有用于清理水底淤泥的清淤机构,所述底盘沿自身宽度方向上的两端设有宽度调节机构,所述宽度调节机构远离底盘的一侧设有行走机构。
7.通过采用上述技术方案,当水底有建筑垃圾时,宽度调节机构启动,可以调节行走机构与底盘之间的距离,从而使得行走机构避开建筑垃圾,减小行进过程中行走机构被卡住的可能性,提高了该清淤机器人整体的灵活性,进而提高工作效率。
8.可选的,所述宽度调节机构包括第一液压缸和悬架板,所述第一液压缸设于底盘上,所述悬架板设于行走机构靠近底盘的一侧,所述第一液压缸的输出端与悬架板固定连接。
9.通过采用上述技术方案,第一液压缸启动带动悬架板移动,悬架板移动带动行走机构沿着底盘的宽度方向移动,从而实现调节行走机构与底盘之间距离的目的。结构简单,便于操作。
10.可选的,所述行走机构包括履带和套设于履带内并支撑履带形成履带圈的驱动组件、辅助张紧组件和高度调节组件,所述驱动组件、辅助张紧组件和高度调节组件设于悬架板上。
11.通过采用上述技术方案,驱动组件驱动履带运转,从而实现清淤机器人本体的行进。可以对高度调节组件的高度进行调节,从而改变行走机构的高度,进而调整底盘的高度。当水底有建筑垃圾时,高度调节组件启动,使得行走机构的高度增加,从而使得底盘的高度增加,提高了清淤机器人本体的越障能力,进一步提高了该清淤机器人整体的灵活性。
12.可选的,所述驱动组件包括驱动轮和驱动电机,所述驱动电机设于悬架板上,所述驱动电机的输出端与驱动轮同轴固定,所述驱动轮转动连接于悬架板上,所述驱动轮用于驱动履带转动。
13.通过采用上述技术方案,驱动电机启动,带动驱动轮转动,从而驱动履带转动,从而实现清淤机器人本体行进的目的。
14.可选的,所述辅助张紧组件包括张紧轮、轮轴和第二液压缸,所述张紧轮固定套设于轮轴上,所述张紧轮的周面侧壁与履带的内表面抵接,所述悬架板上设有滑移孔,所述轮轴穿过滑移孔且与悬架板滑动连接,所述轮轴靠近底轮的一端设有限位环,所述限位环远离底盘的一端与悬架板靠近底盘的一端抵接,所述第二液压缸设于悬架板上,所述第二液压缸的输出端与限位环固定连接。
15.通过采用上述技术方案,第二液压缸启动,带动限位环移动,限位环带动轮轴在滑移孔内滑动,轮轴带动张紧轮沿悬架板的长度方向滑动,从而可以对履带圈进行调整,使履带保持张紧状态。
16.可选的,所述高度调节组件包括第三液压缸、底轮支架和底轮本体,所述第三液压缸设于悬架板远离底盘的一侧,所述第三液压缸竖直设置,所述第三液压缸的输出端与底轮支架的顶部固定连接,所述底轮本体转动连接于底轮支架的底部,所述底轮本体沿底盘的长度方向设有多个,所述底轮本体的周面侧壁与履带的内表面抵接。
17.通过采用上述技术方案,第三液压缸启动带动底轮支架沿竖直方向移动,底轮支架带动底轮本体沿竖直方向移动,从而使得高度调节组件的整体高度发生变化,从而实现对行走机构的整体高度进行调节的目的。
18.可选的,所述悬架板上设有若干个辅助支撑液压缸,所述辅助支撑液压缸的输出端与底轮支架的顶部固定连接。
19.通过采用上述技术方案,辅助支撑液压缸可以提高底轮支架与悬架板之间的连接强度,从而提高使用中高度调节组件的稳定性。
20.可选的,所述履带的内表面上均布有两圈限位卡板,两圈所述限位卡板之间形成有限位空间,所述底轮本体设于限位空间内。
21.通过采用上述技术方案,限位卡板对履带进行限位,减小履带在张紧调整过程以及转动过程中与底轮本体发生脱离的可能性,从而提高工作效率。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.1.通过宽度调节机构以及底盘宽度方向两侧各自独立的行走机构的设置,当水底有建筑垃圾时,宽度调节机构启动,可以调节行走机构与底盘之间的距离,从而使得行走机构避开建筑垃圾,减小行进过程中行走机构被卡住的可能性,提高了该清淤机器人整体的灵活性,进而提高工作效率;
24.2.通过高度调节组件的设置,当水底有建筑垃圾时,高度调节组件启动,使得行走机构的高度增加,从而使得底盘的高度增加,提高了清淤机器人本体的越障能力,进一步提高了该清淤机器人整体的灵活性;
25.3.通过限位卡板的设置,限位卡板对履带进行限位,减小履带在张紧调整过程以及转动过程中与底轮本体发生脱离的可能性,从而提高工作效率。
附图说明
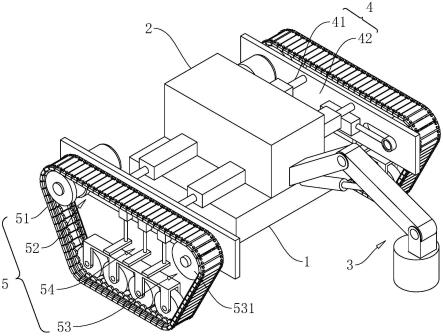
26.图1是本技术实施例的整体结构示意图。
27.图2是体现本技术实施例中的驱动组件和高度调节组件的结构示意图。
28.图3是体现本技术实施例中的辅助张紧组件的结构示意图。
29.附图标记说明:1、底盘;2、清淤机器人本体;3、清淤机构;4、宽度调节结构;41、第一液压缸;42、悬架板;421、滑移孔;422、辅助支撑液压缸;5、行走机构;51、履带;511、限位卡板;5111、限位空间;52、驱动组件;521、驱动轮;522、驱动电机;53、辅助张紧组件;531、张紧轮;532、轮轴;5321、限位环;523、第二液压缸;54、高度调节组件;541、第三液压缸;542、底轮支架;543、底轮本体。
具体实施方式
30.以下结合附图1-3,对本技术作进一步详细说明。
31.本技术实施例公开一种清淤机器人的避让结构。参照图1,一种清淤机器人的避让结构,包括底盘1,底盘1上安装固定有清淤机器人本体2,清淤机器人本体2上设有用于清理水底淤泥的清淤机构3。底盘1沿自身宽度方向上的两端设有宽度调节机构4,宽度调节机构4远离底盘1的一侧设有行走机构5。
32.当水底有建筑垃圾时,宽度调节机构4启动,可以调节行走机构5与底盘1之间的距离,从而使得行走机构5避开建筑垃圾,减小行进过程中行走机构5被卡住的可能性,提高了该清淤机器人整体的灵活性,进而提高工作效率。
33.参照图1,宽度调节机构4包括第一液压缸41和悬架板42,第一液压缸41固定连接于底盘1上且沿底盘1的宽度方向设置,第一液压缸41在底盘1的同一侧设置有两个。悬架板42设于行走机构5靠近底盘1的一侧,第一液压缸41的输出端与悬架板42远离行走机构5的一侧固定连接。当第一液压缸41启动时,带动悬架板42移动,悬架板42移动带动行走机构5沿着底盘1的宽度方向移动,从而实现调节行走机构5与底盘1之间距离的目的。
34.参照图1,行走机构5包括履带51和套设于履带51内并支撑履带51形成履带圈的驱动组件52、辅助张紧组件53和高度调节组件54,驱动组件52、辅助张紧组件53和高度调节组件54设于悬架板42上。如此,驱动组件52驱动履带51运转,从而实现清淤机器人本体2的行进。可以对高度调节组件54的高度进行调节,从而改变行走机构5的高度,进而调整底盘1的高度。当水底有建筑垃圾时,高度调节组件54启动,使得行走机构5的高度增加,从而使得底盘1的高度增加,提高了清淤机器人本体2的越障能力,进一步提高了该清淤机器人整体的灵活性。
35.参照图1和图2,驱动组件52包括驱动轮521和驱动电机522,驱动电机522固定连接于悬架板42上,驱动轮521转动连接于悬架板42上,驱动电机522的输出端与驱动轮521同轴固定,驱动轮521用于驱动履带51转动。当驱动电机522启动时,带动驱动轮521转动,从而驱动履带51转动,从而实现清淤机器人本体2行进的目的。
36.参照图1和图3,辅助张紧组件53包括张紧轮531、轮轴532和第二液压缸523,张紧轮531固定套设于轮轴532上,张紧轮531的周面侧壁与履带51的内表面抵接。悬架板42上开设有滑移孔421,滑移孔421呈腰形,轮轴532穿过滑移孔421且与悬架板42滑动连接,轮轴532在滑移孔421内的滑移方向与悬架板42的长度方向相同,轮轴532靠近底盘1的一端固定
套设有限位环5321,限位环5321远离底盘1的一端与悬架板42靠近底盘1的一端抵接。第二液压缸523固定连接于悬架板42上,第二液压缸523沿悬架板42的长度方向设置,第二液压缸523的输出端与限位环5321的外周面侧壁固定连接。如此,第二液压缸523启动,带动限位环5321移动,限位环5321带动轮轴532在滑移孔421内滑动,轮轴532带动张紧轮531沿悬架板42的长度方向滑动,从而可以对履带圈进行调整,使履带51保持张紧状态。
37.参照图1和图2,高度调节组件54包括第三液压缸541、底轮支架542和底轮本体543,第三液压缸541固定连接于悬架板42远离底盘1的一侧。第三液压缸541液压缸竖直设置,第三液压缸541的输出端与底轮支架542的顶部固定连接。底轮本体543沿底盘1的长度方向设置有多个,底轮本体543的周面侧壁与履带51的内表面抵接。如此,当第三液压缸541启动时,带动底轮支架542沿竖直方向移动,底轮支架542带动底轮本体543沿竖直方向移动,从而使得高度调节组件54的整体高度发生变化,从而实现对行走机构5的整体高度进行调节的目的。
38.参照图2,悬架板42上固定连接有若干个辅助支撑液压缸422,辅助支撑液压缸422竖直设置,辅助支撑液压缸422的输出端与底轮支架542的顶部固定连接。如此,辅助支撑液压缸422可以提高底轮支架542与悬架板42之间的连接强度,从而提高使用中高度调节组件54的稳定性。
39.参照图2,履带51的内表面上均布有两圈限位卡板511,两圈限位卡板511之间形成有限位空间5111,底轮本体543设于限位空间5111内。如此,限位卡板511对履带51进行限位,减小履带51在张紧调整过程以及转动过程中与底轮本体543发生脱离的可能性,从而提高工作效率。
40.本技术实施例一种清淤机器人的避让结构的实施原理为:当水底有建筑垃圾时,第一液压缸41启动带动悬架板42移动,悬架板42移动带动行走机构5沿着底盘1的宽度方向移动,从而调节行走机构5与底盘1之间的距离,使得行走机构5避开建筑垃圾,减小行进过程中行走机构5被卡住的可能性,提高了该清淤机器人整体的灵活性,进而提高工作效率。
41.除此之外,第三液压缸541启动带动底轮支架542沿竖直方向移动,底轮支架542带动底轮本体543沿竖直方向移动,从而使得高度调节组件54的整体高度发生变化,从而实现对行走机构5的整体高度进行调节的目的。当水底有建筑垃圾时,可以启动高度调节组件54,使得底盘1的高度增加,提高了清淤机器人本体2的越障能力,进一步提高了该清淤机器人整体的灵活性。
42.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1