一种用于搬运的辅助机器人
1.本实用新型涉及辅助机器人技术领域,具体涉及一种用于搬运的辅助机器人。
背景技术:
2.机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。机器人的任务是协助或取代人类的工作。机器人是高级整合控制论、机械电子、计算机、材料和仿生学的产物,在工业、医学、农业、服务业、建筑业甚至军事等领域中均有重要用途。工业机器人按执行机构运动的控制机能,又可分点位型和连续轨迹型。点位型只控制执行机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、装卸等作业;连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业。
3.现有的用于搬运的辅助机器人在使用的时候,不能便捷的对于运货仓后端的开合门进行便捷的卡嵌定位,从而容易造成开合门的关闭复杂。
技术实现要素:
4.为此,本实用新型提供一种用于搬运的辅助机器人,通过转动开合门,使得弧形盖沿着限位槽滑动,并且直至弧形盖的外端与限位槽的一端内表面相互接触,继续转动开合门,此时弧形盖中央的滑杆沿着滑筒滑动挤压第二弹簧,从而使得第一伸缩杆在第一弹簧的弹动下卡入卡孔内,从而保证了对于开合门的闭合便捷,以解决现有技术中不能便捷的锁住开合门的问题。
5.为了实现上述目的,本实用新型实施例提供如下技术方案:一种用于搬运的辅助机器人,包括辅助机器人主体,所述辅助机器人主体的上端设有运货仓,所述运货仓的后端设有开合门,所述开合门的外端设有第一伸缩杆,所述第一伸缩杆的内端设有第一弹簧,所述第一伸缩杆的外端设有弧形盖,所述弧形盖的中央设有滑筒,所述滑筒的内端设有滑杆,所述滑杆的外端设有第二弹簧,所述运货仓的后端设有卡孔,所述卡孔的外端设有限位槽。
6.进一步地,所述辅助机器人主体与运货仓之间固定连接,所述运货仓的内端与开合门之间活动连接,所述开合门的两端与第一伸缩杆之间活动连接,所述第一伸缩杆之间通过第一弹簧活动连接,所述第一伸缩杆的外表面与弧形盖的内表面相互接触,所述弧形盖的中央与滑筒之间贯穿连接,所述滑筒的内端与滑杆之间滑动连接,通过设置有滑筒,便于带动滑杆的滑动。
7.进一步地,所述滑杆的一端与第一伸缩杆的固定端固定连接,所述第一伸缩杆的活动端与卡孔之间活动连接,所述第二弹簧包裹在滑杆的外端,所述第二弹簧的两端分别与滑杆的一端外表面、滑筒的一端内表面之间固定连接,通过设置有第二弹簧,便于带动弧形杆的滑动。
8.进一步地,所述运货仓的两端与卡孔之间贯穿连接,所述卡孔的外端与限位槽之间贯穿连接,所述限位槽的槽口直径长度等于弧形盖的直径长度,所述卡孔的截面直径长
度小于弧形盖的直径长度,通过设置有弧形盖,便于遮盖第一伸缩杆。
9.进一步地,所述运货仓的内端设有卡槽,所述卡槽的内端设有卡块,所述卡块的下端设有第二伸缩杆,所述第二伸缩杆的内端设有第三弹簧,所述第三弹簧的下端设有联动杆,所述联动杆的下端设有连接板,所述连接板的上端设有贯穿孔,所述贯穿孔的外端设有定位板,所述连接板的下端设有电动推杆,所述卡槽的下端设有动力槽,通过设置有定位板,便于限位第二伸缩杆。
10.进一步地,所述运货仓的内端与卡槽之间贯穿连接,所述卡槽嵌入安装在运货仓的下端外表面,所述卡槽与卡块之间活动连接,所述卡块的下端与第二伸缩杆的活动端之间固定连接,所述第二伸缩杆的内端与第三弹簧之间活动连接,所述第二伸缩杆的固定端下端与联动杆之间固定连接,通过设置有第二伸缩杆,便于带动卡块沿着卡槽滑动。
11.进一步地,所述联动杆的下端与连接板之间固定连接,所述联动杆通过贯穿孔贯穿于定位板的上下两端外表面,所述连接板的下端与电动推杆的上端外表面之间固定连接,通过设置有电动推杆,便于带动连接板的上下移动。
12.本实用新型实施例具有如下优点:
13.1、本实用新型通过设置有辅助机器人主体、运货仓、开合门、第一伸缩杆、第一弹簧、第二弹簧、弧形盖、滑杆、滑筒、限位槽、卡孔,通过转动开合门,使得弧形盖沿着限位槽滑动,并且直至弧形盖的外端与限位槽的一端内表面相互接触,继续转动开合门,此时弧形盖中央的滑杆沿着滑筒滑动挤压第二弹簧,从而使得第一伸缩杆在第一弹簧的弹动下卡入卡孔内,从而保证了对于开合门闭合的便捷性。
14.2、本实用新型通过设置有卡块、卡槽、第二伸缩杆、第三弹簧、定位板、联动杆、连接板、贯穿孔、电动推杆、动力槽,通过电动推杆在动力槽内带动连接板向上移动,使得通过贯穿孔连接的联动杆带动第二伸缩杆向上移动,从而便捷的使没有被货物压着的卡块通过第三弹簧的弹动,在第二伸缩杆的作用下弹出卡槽,贴合在货物的表面,从而方便了对于货物在运输的过程中下端能够便捷的抵住。
附图说明
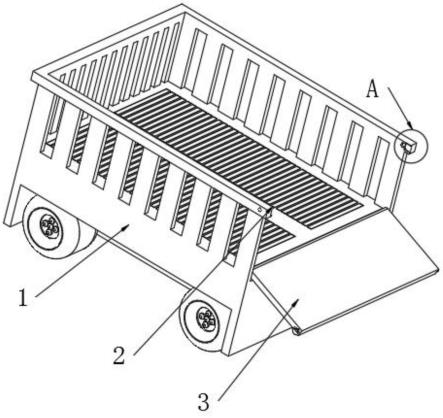
15.图1为本实用新型提供的整体结构示意图;
16.图2为本实用新型提供的弧形盖侧剖视图;
17.图3为本实用新型提供的图1中a的放大示意图;
18.图4为本实用新型提供的卡块侧剖视图;
19.图5为本实用新型提供的图4中b的放大示意图;
20.图6为本实用新型提供的动力槽侧剖视图。
21.图中:1、辅助机器人主体;2、运货仓;3、开合门;4、第一伸缩杆;5、第一弹簧;6、第二弹簧;7、弧形盖;8、滑杆;9、滑筒;10、限位槽;11、卡孔;12、卡块;13、卡槽;14、第二伸缩杆;15、第三弹簧;16、定位板;17、联动杆;18、连接板;19、贯穿孔;20、电动推杆;21、动力槽。
具体实施方式
22.以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效,显然,所描述的实施例是
本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.参照说明书附图1-3,该实施例的一种用于搬运的辅助机器人,包括辅助机器人主体1,所述辅助机器人主体1的上端设有运货仓2,所述运货仓2的后端设有开合门3,所述开合门3的外端设有第一伸缩杆4,所述第一伸缩杆4的内端设有第一弹簧5,所述第一伸缩杆4的外端设有弧形盖7,所述弧形盖7的中央设有滑筒9,所述滑筒9的内端设有滑杆8,所述辅助机器人主体1与运货仓2之间固定连接,所述运货仓2的内端与开合门3之间活动连接,所述开合门3的两端与第一伸缩杆4之间活动连接,所述第一伸缩杆4之间通过第一弹簧5活动连接,所述第一伸缩杆4的外表面与弧形盖7的内表面相互接触,所述弧形盖7的中央与滑筒9之间贯穿连接,所述滑筒9的内端与滑杆8之间滑动连接,所述滑杆8的外端设有第二弹簧6,所述滑杆8的一端与第一伸缩杆4的固定端固定连接,所述第一伸缩杆4的活动端与卡孔11之间活动连接,所述第二弹簧6包裹在滑杆8的外端,所述第二弹簧6的两端分别与滑杆8的一端外表面、滑筒9的一端内表面之间固定连接,所述运货仓2的后端设有卡孔11,所述卡孔11的外端设有限位槽10,所述运货仓2的两端与卡孔11之间贯穿连接,所述卡孔11的外端与限位槽10之间贯穿连接,所述限位槽10的槽口直径长度等于弧形盖7的直径长度,所述卡孔11的截面直径长度小于弧形盖7的直径长度。
24.实施场景具体为:本实用新型在使用时,当需要对于辅助机器人能够便捷锁定运货仓2后端的开合门3的时候,通过转动开合门3,使得弧形盖7沿着限位槽10滑动,并且直至弧形盖7的外端与限位槽10的一端内表面相互接触,继续转动开合门3,此时弧形盖7中央的滑杆8沿着滑筒9滑动挤压第二弹簧6,从而使得第一伸缩杆4在第一弹簧5的弹动下卡入卡孔11内,从而保证了对于开合门3闭合的便捷性,该实施方式具体解决了现有技术中不能便捷的锁住开合门3的问题。
25.参照说明书附图4-6,该实施例的一种用于搬运的辅助机器人,所述运货仓2的内端设有卡槽13,所述卡槽13的内端设有卡块12,所述卡块12的下端设有第二伸缩杆14,所述第二伸缩杆14的内端设有第三弹簧15,所述第三弹簧15的下端设有联动杆17,所述运货仓2的内端与卡槽13之间贯穿连接,所述卡槽13嵌入安装在运货仓2的下端外表面,所述卡槽13与卡块12之间活动连接,所述卡块12的下端与第二伸缩杆14的活动端之间固定连接,所述第二伸缩杆14的内端与第三弹簧15之间活动连接,所述第二伸缩杆14的固定端下端与联动杆17之间固定连接,所述联动杆17的下端设有连接板18,所述连接板18的上端设有贯穿孔19,所述贯穿孔19的外端设有定位板16,所述连接板18的下端设有电动推杆20,所述卡槽13的下端设有动力槽21,所述联动杆17的下端与连接板18之间固定连接,所述联动杆17通过贯穿孔19贯穿于定位板16的上下两端外表面,所述连接板18的下端与电动推杆20的上端外表面之间固定连接。
26.实施场景具体为:本实用新型在使用时,当需要对于运送的物资进行便捷的存放的时候,保证在运输的过程中运输的物资不会晃动,通过电动推杆20在动力槽21内带动连接板18向上移动,使得通过贯穿孔19连接的联动杆17带动第二伸缩杆14向上移动,从而便捷的使没有被货物压着的卡块12通过第三弹簧15的弹动,在第二伸缩杆14的作用下弹出卡槽13,贴合在货物的表面,从而方便了对于货物在运输的过程中下端能够便捷的抵住,该实
施方式具体解决了现有技术中不能对于货物的下端进一步的抵住,保证运输的稳定的问题。
27.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1