用于控制船用混合动力系统的方法与流程
1.本发明涉及具有多个动力总成(drivelines)的船用混合动力装置的控制,所述多个动力总成包括内燃发动机和电动马达,这些动力总成用于操作诸如休闲船的船舶。
背景技术:
2.大多数船用混合动力系统使用基于动力需求的控制策略,该需求由操作员控制。对于包括多个动力总成的船舶,动力需求在所有动力总成之间平均分配,并且每个动力总成中的内燃发动机和电动马达单独运行或一起运行,这取决于诸如动力需求的大小和/或蓄电单元的充电水平或荷电状态(soc)之类的因素。
3.具有基于动力需求和自动化混合动力功能的控制策略的船用混合动力系统可能试图控制内燃发动机,从而以最佳效率或接近最佳的效率运行。然而,推进单元的动力需求(因此,推进单元的转速)是由操作员控制的。因此,内燃发动机的最佳效率运行通常是不可能的,并且可能以电动马达的低效运行为代价来实现。
4.本发明提供了一种改进的、用于控制船用混合动力系统的方法,并且旨在解决上述问题。
技术实现要素:
5.本发明的目的是提供一种用于控制船用混合动力系统的方法以及一种船用混合动力系统,以解决上述问题。
6.该目的通过根据权利要求1所述的方法来实现。
7.在下文中,术语“动力总成”用于描述包括推进单元组合的装置。这种动力总成优选是并联混合动力总成。推进单元的示例是内燃发动机(ice)和电动马达(em)。每个动力总成均被布置成驱动设有一个或多个推进器的推进器轴。电动马达可以由公共蓄电单元或由每个电动马达的单独蓄电单元供电。这些蓄电单元也可以称为电池。内燃发动机以所请求的或所确定的发动机速度运行。在下文中,术语“发动机速度”也可以称为第一推进单元的转速。提供合适的减速齿轮装置或另一合适的变速器,以将发动机速度减小到给推进器轴的较低旋转输出。该减速齿轮装置的位置可以取决于所使用的电动马达类型。如果推进单元以相同的转速运行,则减速齿轮装置可以例如布置在电动马达的输出轴附近。替代地,该减速齿轮装置可以布置在内燃发动机的输出轴附近,其中,该电动马达以推进器轴的旋转输出速度旋转。在下文中将遵循这些术语。
8.根据本发明的一个方面,该目的通过一种至少控制第一和第二并联混合动力总成的方法来实现,该第一和第二并联混合动力总成被布置成用于驱动船舶。每个动力总成均包括呈内燃发动机形式的第一推进单元,该第一推进单元与呈电动马达形式的第二推进单元以可操作方式连接,以驱动推进器轴并产生用于推进船舶的推力。替代的布置可以是使用这样的动力总成:该动力总成包括以可操作方式连接到单个推进器轴的两个第一推进单元和两个第二推进单元。在下文中,术语“第一推进单元”用于表示内燃发动机(ice),而术
语“第二推进单元”用于表示电动马达(em)。内燃发动机经由驱动轴以可操作方式连接到电动马达,该驱动轴可以包括可选的可控离合器。至少一个控制单元被布置用于单独地控制所有并联混合动力总成中的每个第一和第二推进单元。所有的并联混合动力总成都可以由动力总成中央控制单元控制,该中央控制单元控制各个动力总成中的每个内燃发动机和电动马达。替代地,可以为各个并联混合动力总成中的每个内燃发动机和每个电动马达提供单独的控制单元。根据另一替代方案,动力总成中央控制单元可以与用于每个推进单元的各个控制单元结合使用。控制单元之间的数据传输和交换可以使用控制器局域网(can总线)、局域网(lan)或类似的有线连接来进行,或者通过使用合适的无线局域网(wlan)或诸如wifi或蓝牙的其它无线技术来进行。
9.该方法包括执行以下步骤:
10.‑
接收指示船速的请求;
11.‑
基于所接收到的请求,确定每个第一推进单元的转速以实现所请求的船速;
12.‑
基于所确定的转速,从每个推进单元的效率分布图中确定第一推进单元和第二推进单元各自的效率点;
13.‑
分别调节每个动力总成中的第一推进单元的转速,以在维持所请求的船速的同时提高该第一推进单元的效率,以及
14.‑
同时调节每个动力总成中的来自对应的第二推进单元的负载,以提高每个动力总成和整个动力总成装置的效率;
15.其中,各个动力总成被控制,使得来自所有第一推进单元的组合转速足以维持所请求的船速。
16.可以从用户操作的控制器接收指示船速的请求,该控制器可以是操纵杆或多个控制杆(levers)。在操作中,操作员通过将控制器致动到零油门(zero throttle)和全油门(full throttle)之间的控制杆设置来请求船速。该控制杆在这些端点之间的位移不会对应于实际船速的线性增加。然而,发动机速度将是控制杆位移的线性函数,从而,控制杆到特定设置的位移实际上是对与该设置相对应的发动机速度的请求。因此,用户做出了指示船速的请求,并且所述控制单元接收对发动机速度的请求。
17.控制器可以是控制所有动力总成的单个操纵杆。该控制器还可以包括用于控制一个或多个动力总成的一个或多个控制杆。例如,包括两个动力总成的装置可以具有两个控制杆,这些控制杆可以单独或一起移位。三重装置可以具有三个控制杆,其中,中心控制杆可以输出表示发动机速度请求的平均值的信号。四重装置则可以使用两个控制杆,每个控制杆各自控制两个动力总成。当请求船速时,这些控制杆通常一起移位。对此的例外当然是低速操纵,例如入坞操纵,其中可能需要单独的移位以实现期望方向上的船舶移位。对于具有超过四个动力总成的装置,优选允许每个控制杆控制不止一个动力总成。
18.如上所述,基于所接收到的来自操作员的请求,控制每个第一推进单元的转速以实现所请求的船速。然而,如果所请求的船速低于当前转速的预定极限,则可以替代地通过离合器控制来实现期望的速度。例如,可以通过在第一推进单元以其怠速速度或刚好高于其怠速速度运行的同时允许离合器滑动来实现用于入坞的相对较低的操纵速度。
19.内燃发动机和电动马达在将能量转换为机械运动方面都具有最佳效率点。本发明的目的是平衡动力总成之间的组合效率映射(combined efficientcy mapping),以实现所
有动力总成的最佳可能组合效率。每个ice和em的效率点由存储在中央控制单元或每个单独控制单元中的效率分布图(efficiency maps)确定。下面将更详细地描述效率分布图的示例。
20.当使用中央控制单元或多个控制单元时,控制推进单元所需的数据将需要在中央控制单元和动力总成之间进行交换,或者在每个动力总成的单独控制单元之间进行交换,以便所有推进单元可以一起运行。执行对这些推进单元的协调控制主要是为了维持所请求的速度。当分别调节每个动力总成中的第一推进单元的转速时,维持所请求的速度的要求将需要在控制单元之间交换数据。根据本发明,各个动力总成被控制,使得所有动力总成的推进器轴的组合旋转输出速度或平均旋转输出速度足以维持所请求的船速。由于每个内燃发动机都被朝向合适的效率点控制,因此每个动力总成中的来自对应的电动马达的负载同时被朝向合适的效率点调节。通过调节每个动力总成中的内燃发动机和电动马达来提高每个动力总成的效率,提高了整个动力总成装置的效率。
21.在运行中,特定动力总成中的第一推进单元的转速被朝向从该第一推进单元的效率分布图确定的效率点调节。同时,响应于该第一推进单元的转速被朝向效率点调节,可以通过减小或增加从第二推进单元到第一推进单元上的负载来调节该动力总成中的第二推进单元。这意味着从第二推进单元提供给该动力总成的扭矩可以是正的或负的。这里,如果第一推进单元被朝向期望的效率点的调节需要减小负载,则第二推进单元可以运行,以通过提供辅助的正驱动扭矩来减小从第二推进单元到第一推进单元上的负载。类似地,如果第一推进单元被朝向期望的效率点的调节需要增加负载,则第二推进单元可以运行,以通过提供负的制动驱动扭矩来增加从第二推进单元到第一推进单元上的负载。可以通过控制第二推进单元为诸如电池或超级电容器的蓄电单元进行充电,来实现对来自第二推进单元的负载的这种调节。
22.当操作第二推进单元以减小或增加从第二推进单元到第一推进单元上的负载时,可以针对第二推进单元的期望效率点来选择减小或增加的幅度。减小或增加负载的决定可以主要根据所确定的第一推进单元的效率点且随后根据所确定的第二推进单元的效率点来进行。因此,可以对来自对应的第二推进单元的负载的调节进行加权,以优先考虑第一推进单元的效率。然而,如果动力总成的组合效率达到了最大值,则可以在第一推进单元达到期望的效率点之前停止对从对应的第二推进单元到第一推进单元上的负载的调节。因此,第一推进单元或第二推进单元都不会以它们各自的期望效率点运行,但该动力总成的组合效率提高了。能够在船用混合动力系统中的至少一个动力总成上执行对第一推进单元和第二推进单元的这种控制。
23.在包括多个动力总成的装置中,当调节至少一个第一推进单元的转速时,能够允许该推进单元以与至少一个其它第一推进单元不同的转速运行。因此,能够控制至少一个动力总成,以与一个或多个附加的动力总成不同的旋转输出速度运行。替代地,所有动力总成都能够以不同的旋转输出速度运行。先决条件是:各个动力总成被控制,使得所有动力总成的组合或平均旋转输出速度足以维持所请求的船速。
24.如上所述,在将每个第一推进单元的转速朝向期望的效率点调节之后,可以控制动力总成,使得这些动力总成以不同的旋转输出速度运行。于是,当直线向前行驶时,每个单独动力总成的推力可产生组合推力,该组合推力与船舶的中心纵向轴线成一定角度。替
代地,该组合推力的方向可以偏离操作员所要求的期望转向方向。当这种情况发生时,需要校正一个或多个动力总成或可转向推进器的转向角。例如,如果船舶包括两个或更多个并联混合动力总成,则可通过控制至少一个动力总成的转向控制单元来调节所述组合推力的方向,以将总推力维持在期望方向上。
25.替代地,可操作这些动力总成,以产生与当前的所请求的转向方向一致的组合推力。取决于所确定的每个单独动力总成的效率点,可以通过选择性地调节构成该装置的动力总成来实现具有中性方向的组合推力。在包括三个或更多个动力总成的装置中,可以成对地操作动力总成,优选是与船舶的中心纵向轴线等距地定位的动力总成。根据第一示例,该船舶包括三个并联混合动力总成,其中,位于中心动力总成的两侧上的动力总成以与中心动力总成不同的旋转输出速度运行。根据第二示例,该船舶包括四个并联混合动力总成,其中,位于一对中心动力总成的两侧上的动力总成以与中心动力总成不同的旋转输出速度运行。选择以相同旋转输出速度运行的、成对地对称定位的动力总成将平衡所述组合推力,这一原理可应用于包括三个或更多动力总成的装置。
26.根据另一示例,如果该船舶包括两个或更多个并联混合动力总成,那么,如果其余一个或多个动力总成的旋转输出速度足以维持所请求的船速,则可以使至少一个动力总成停止。
27.根据本发明的第二方面,该目的通过一种控制单元来实现,该控制单元用于至少操作第一和第二并联混合动力总成,该第一和第二并联混合动力总成被布置成用于驱动船舶,其中,使用根据本发明的方法来操作该控制单元。
28.根据本发明的第三方面,该目的通过一种船舶来实现,该船舶至少具有第一和第二并联混合动力总成,该第一和第二并联混合动力总成被布置成用于驱动船舶,其中,使用根据本发明的方法来操作这些动力总成。
29.根据本发明的另一方面,该目的通过一种计算机程序来实现,该计算机程序包括程序代码组件,该程序代码组件用于当所述程序在计算机上运行时执行本发明的所有方法步骤。
30.根据本发明的另一方面,该目的通过一种计算机程序产品来实现,该计算机程序产品包括存储在计算机可读介质上的程序代码组件,该程序代码组件用于当所述程序产品在计算机上运行时执行本发明的所有方法步骤。
31.本发明涉及调节每个动力总成中的内燃发动机和电动马达,以提高每个动力总成的效率。这样做的效果是提高了整个动力总成装置的效率。通过利用“该装置具有不止一个带有单独电池组的动力总成”这一事实,能够在动力总成之间平衡负载,以实现最佳可能的效率。不是仅考虑每个ice的效率分布图,而是,当使用电动马达以将负载置于沿着ice效率分布图的负载轴线的最佳位置时,考虑每个ice和对应的em的效率分布图。这通过使用电动马达来平衡相应ice上的负载和在动力总成之间平衡ice的转速来实现。平衡该转速可以涉及增加一个或多个动力总成上的转速并减小一个或多个其它动力总成上的转速。这样,可以维持操作员所请求的船速,同时能够以更好的速度/负载组合来自由地运行发动机和马达。
32.在以下描述和从属权利要求中公开了本发明的进一步的优点和有利特征。
附图说明
33.参照附图,下面是作为示例引用的本发明实施例的更详细描述。
34.在这些图中:
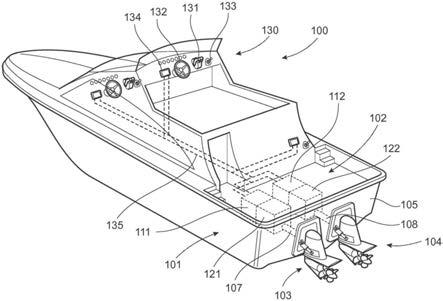
35.图1示出了包括根据本发明的船用混合动力装置的被示意性地图示的船舶;
36.图2a到图2c示出了具有替代的动力总成装置的、被示意性地图示的船舶;
37.图3示出了包括三个动力总成的混合动力装置的示意图;
38.图4示出了内燃发动机的效率分布图的示例;
39.图5示出了电动马达的效率分布图的示例;
40.图6a到图6c示出了替代的动力总成装置的推力分布的示例;
41.图7示出了说明动力总成的操作的示意图;并且
42.图8示出了应用于计算机装置的本发明。
具体实施方式
43.图1示出了包括根据本发明的船用混合动力装置的、被示意性地图示的船舶100。该图中的混合动力装置包括第一和第二并联混合动力总成101、102,该第一和第二并联混合动力总成101、102被布置成经由安装在船尾105上的第一驱动器103和第二驱动器104来驱动船舶100。每个动力总成101、102均包括呈内燃发动机(ice)形式的第一推进单元111、112,该第一推进单元与呈电动马达(em)形式的第二推进单元121、122以可操作方式连接,以驱动推进器轴107、108并产生用于推进船舶的推力。每个第二推进单元121、122均连接到单独的电源(未示出),例如蓄电单元或电池。
44.可以通过由用户操作的控制器131从操作站130接收指示船速的请求。在本示例中,多个控制杆用于控制动力总成速度。该控制器也可以是操纵杆。操作站130还包括用于控制转向方向的方向盘132、用于在入坞期间操作船舶的操纵杆133、以及显示器134。显示器134可以用于向操作员提供与船舶及动力总成相关的操作参数,和/或用于显示导航信息。该显示器可以是图形用户界面(gui),并且可以是触敏的。与推进和转向相关的控制信号从操作站130经由can总线135发送到对应的推进控制单元(参见图3)和转向控制单元(未示出)。如图1所示,可以提供不止一个操作站。
45.图2a到图2c示出了具有替代的动力总成装置的、被示意性地图示的船舶。图1示出了包括由并联混合动力总成驱动的两个船尾驱动器的船舶。然而,本发明适用于如图2a到图2c中所示的其它驱动器,其中示出了多个方位驱动器。
46.图2a示出了包括两个并联混合动力总成201、202的船舶,其中,每个动力总成201、202均设有呈内燃发动机(ice)形式的第一推进单元211、212,该第一推进单元211、212与呈电动马达(em)形式的第二推进单元221、222以可操作方式连接。
47.图2b示出了包括三个并联混合动力总成201、202、203的船舶,其中,每个动力总成201、202、203均设有呈内燃发动机(ice)形式的第一推进单元211、212、213,该第一推进单元211、212、213与呈电动马达(em)形式的第二推进单元221、222、223以可操作方式连接。
48.图2c示出了包括四个并联混合动力总成201、202、203、204的船舶,其中,每个动力总成201、202、203、204均设有呈内燃发动机(ice)形式的第一推进单元211、212、213、214,该第一推进单元211、212、213、214与呈电动马达(em)形式的第二推进单元221、222、223、
224以可操作方式连接。
49.本发明不限于图2a到图2c中所示的示例,而是适用于包括多个混合动力总成的任何适当的动力总成装置。所使用的动力总成的数量通常由每艘船舶的尺寸和速度要求决定。因此,相对小的船舶可以如图1所示地使用两个混合动力总成,而相对大的船舶可以使用多达七个或八个动力总成。
50.图3示出了包括三个动力总成的并联混合动力总成装置的示意图。该装置包括被布置成用于驱动船舶的第一、第二和第三并联混合动力总成310、320、330。每个动力总成均包括呈内燃发动机(ice)形式的第一推进单元311、321、331,该第一推进单元311、321、331与呈电动马达(em)形式的第二推进单元312、322、332以可操作方式连接,以驱动推进器轴313、323、333并产生用于推进船舶的推力。每个第一推进单元311、321、331均经由驱动轴314、324、334以可操作方式连接到相应的第二推进单元312、322、332,该驱动轴可以包括可选的可控离合器315、325、335。合适的减速齿轮装置或变速器(未示出)设置在每个第二推进单元的输出轴附近。该减速齿轮装置被布置成将推进单元的转速减小到用于推进器轴的较低旋转输出速度。每个第二推进单元312、322、332均连接到单独的电源(未示出),例如蓄电单元或电池。控制单元316、326、336、317、327、337被布置成分别对所有并联混合动力总成中的每个第一和第二推进单元311、321、331、312、322、332进行单独控制。所有并联混合动力总成310、320、330由动力总成中央控制单元340控制,该动力总成中央控制单元340与相应动力总成中的每个第一和第二推进单元通信并对其进行控制。每个动力总成310、320、330还在它们各自的推进器轴313、323、333上包括可控离合器318、328、338,从而允许动力总成中央控制单元340控制来自每个动力总成310、320、330的推力。
51.操作站350包括由用户操作的动力总成速度控制器351。在本示例中,多个控制杆用于控制动力总成速度。操作站350还包括用于控制转向方向的方向盘352、用于在入坞期间操作船舶的操纵杆353以及显示器354。显示器354可以用于向操作员提供与船舶和动力总成相关的操作参数,和/或用于显示导航信息。该显示器可以是图形用户界面(gui)354,并且可以是触敏的。来自速度控制器351、方向盘352、操纵杆353以及图形用户界面354的信号由舵控制单元355处理,该舵控制单元355进而生成给转向控制器(未示出)和动力总成中央控制单元340的控制信号。控制信号从操作站350经由can总线356发送到动力总成中央控制单元340和转向控制单元(未示出)。can总线356还连接动力总成中央控制单元340和用于第一和第二推进单元的各个控制单元316、326、336、317、327、337。替代地,这些控制单元之间的数据传输和交换可以使用局域网(lan)或类似的有线连接来进行,或者通过使用合适的无线局域网(wlan)或诸如wifi或蓝牙的其它无线技术来进行。
52.图4示出了内燃发动机的效率分布图的示例。该效率分布图是这样的图表:该图表指示了在y轴上绘制的发动机扭矩(nm)与在x轴上绘制的发动机速度(rpm)之间的关系。等高线示出了特定燃料消耗量(g/kwh),从而指示发动机效率较高或较低的速度/负载范围区域。在该图表中,希望使发动机在具有较低的特定燃料消耗值的等高线内运行。界定所绘制的等高线的上部线指示了发动机针对不同发动机速度所能实现的最大发动机扭矩。
53.图5示出了电动马达的效率分布图的示例。该效率分布图是这样的图表:该图表指示了在y轴上绘制的马达扭矩(nm)与在x轴上绘制的马达速度(rpm)之间的关系。等高线示出了马达效率(无量纲),以指示该马达在将电力转换为机械能方面的效率较高或较低的速
度/负载范围区域。在该图表中,希望使电动马达在具有高效率值的等高线内运行。
54.参照具有包括第一和第二混合动力总成的装置的船舶来描述以下示例。每个混合动力总成包括呈内燃发动机形式的第一推进单元和呈电动马达形式的第二推进单元。该发动机和马达的效率分布图被存储在中央控制单元或存储在用于各个推进单元的单独控制单元中。
55.在操作中,两个动力总成中的内燃发动机一开始以所请求的发动机速度n0(在图4中以点p0表示)运行。为了提高该装置的效率,第一混合动力总成中的第一推进单元的转速被朝向第一效率点p1调节,该点是从用于第一推进单元的所存储的发动机效率分布图中确定的。调节的方向由箭头a1指示。这种调节涉及将第一推进单元的发动机速度从所请求的发动机速度n0减小到较低的第一发动机速度n1。为了实现这一点,通过响应于第一推进单元的转速的所需减小而增加从第二推进单元到第一推进单元上的负载,从而调节第一混合动力总成中的第二推进单元。这在图5中示出,其中,第二推进单元被从初始操作点e0处的初始马达速度n0调节到第一操作点e1处的第一马达速度n1,在该初始操作点e0处,不生成扭矩,而在该第一操作点处,生成负的制动扭矩。初始马达速度n0等于第一推进单元的初始发动机速度n0。调节的方向由箭头b1指示。这种负的扭矩增大了从第二推进单元到第一推进单元上的负载,该第二推进单元现在以等于第一推进单元的转速的马达速度n1操作。
56.同时,第二混合动力总成中的第一推进单元的转速被朝向第二效率点p2调节,该点是从用于第一推进单元的所存储的效率分布图中确定。调节的方向由箭头a2指示。这种调节涉及将第一推进单元的发动机速度从所请求的发动机速度n0增加到更高的第二发动机速度n2。同时,通过响应于第一推进单元的转速的所需增加而增加从第二推进单元到第一推进单元上的负载,从而调节第二混合动力总成中的第二推进单元。这在图5中示出,其中,第二推进单元被从初始操作点e0处的初始马达速度n0调节到第二操作点e2处的第二马达速度n2,在该初始操作点e0处,不生成扭矩,而在该第二操作点e2处,生成负的制动扭矩。调节的方向由箭头b2指示。这种负的扭矩增大了从第二推进单元到第一推进单元上的负载,该第二推进单元现在以对应于第一推进单元的转速的马达速度n2运行。该第二推进单元提供负的制动驱动扭矩的操作可以通过控制第二推进单元为它们各自的蓄电单元(例如电池或超级电容器)充电来实现。
57.当调节各个动力总成的第一推进单元的转速时,允许这些推进单元以不同的转速n1、n2运行。各个第一推进单元的转速n1、n2被控制,使得来自所有第一推进单元的组合或平均转速对应于所有第一推进单元的最初请求转速n0。这将提供维持所请求的船速所需的来自所有动力总成的组合旋转输出速度。
58.图6a到图6c示出了用于多个替代的动力总成装置的推力分布的示例。根据本发明,在将每个第一推进单元的转速朝向期望的效率点调节之后,可以控制这些动力总成,使得它们以不同的旋转输出速度运行。
59.图6a示出了用于包括两个动力总成的装置的推力分布的示例。图6a示出了包括两个并联混合动力总成601、602的船舶600。根据本示例,第一动力总成601中的第一推进单元已被朝向期望的效率点调节,该调节需要减小第一推进单元的转速并增加来自第二推进单元的负载(见图4,参照“p
1”)。来自第二推进单元的负载的这种增加提供了施加到第一动力总成601的第一推进单元的负制动驱动扭矩。这种速度减小导致图6a中的箭头所示的减小
的第一推力f1。同时,第二动力总成602中的第一推进单元也已被朝向期望的效率点调节,该调节需要增加第一推进单元的转速并增加来自第二推进单元的负载(见图4,参照“p
2”)。来自第二推进单元的负载的这种增加提供了施加到第二动力总成602的第一推进单元的负制动驱动扭矩。这种速度增加导致了图6a中的箭头所示的增加的第二推力f2。
60.从图6a中可以看到,来自第二动力总成602的推力f2的大小大于来自第一动力总成601的推力f1的大小。这将引起绕船舶600的重心cg的转动力矩,必须对此进行补偿,以防止偏离操作员所请求的转向方向。可以通过分别校正第一动力总成601和第二动力总成602的转向角α1和/或α2来消除该转动力矩。这种校正可以由转向控制单元(未示出)以与这种单元对由风或水流引起的侧向漂移进行校正的方式相同的方式来执行。在此不更详细地描述这种类型的转向控制单元。这样,包括第一推力f1和第二推力的组合推力的方向可以由转向控制单元调节,以将总推力f0维持在期望方向上。此外,由于这些推力与相应的第一和第二动力总成的旋转输出速度成比例,因此各个动力总成均被控制,使得来自所有动力总成的平均旋转输出速度足以维持所请求的船速。如果一个或多个动力总成的转向角被如上所述地校正,则可能需要增加一个或多个动力总成的旋转输出速度,以维持所请求的船速。替代地,如果该船舶设有可转向的舵和固定的驱动单元,则可以使用该舵来补偿与转向方向的偏差。
61.图6b示出了用于包括三个动力总成的装置的推力分布的示例。图6b示出了包括三个并联混合动力总成611、612、613的船舶610。根据本示例,第一动力总成611和第三动力总成613中的第一推进单元已被朝向期望的效率点调节,该调节需要增加第一推进单元的转速并增加来自第二推进单元的负载(见图4,参照“p
2”)。来自第二推进单元的负载的这种增加提供了施加到第一动力总成611和第三动力总成613的第一推进单元的负制动驱动扭矩。这种速度增加已导致了图6b中的箭头所示的增加的第一推力f1和第三推力f3,这些力的大小相等。
62.同时,第二动力总成612中的第一推进单元也已被朝向期望的效率点调节,该调节需要减小该第一推进单元的转速并增加来自第二推进单元的负载(见图4,参照“p
1”)。来自第二推进单元的负载的这种增加提供了施加到第二动力总成612的第一推进单元的负制动驱动扭矩。这种速度减小导致了图6b中的箭头所示的减小的第二推力f2。各个动力总成611、612、613的旋转输出速度被控制,使得来自所有动力总成的平均旋转输出速度足以维持所请求的船速。
63.从图6b可以看到,来自第一动力总成611和第三动力总成613的推力f1、f3的大小大于来自第二动力总成612的推力f2的大小。由于图6b中的装置包括三个动力总成,因此可以使第一和第三动力总成作为一对来运行。根据本示例,第一动力总成611和第三动力总成613在位于中心线c
l
上的第二动力总成612的两侧上,并且与船舶的中心线c
l
等距地间隔开。第一动力总成611和第三动力总成613以相同的旋转输出速度运行,该旋转输出速度高于中心的第二动力总成612的旋转输出速度。这样,可以操作该动力总成,以产生如下的组合推力f0:该组合推力等于各个推力f1、f2、f3的总和,并且与当前请求的转向方向一致。取决于所确定的每个单独的动力总成的效率点,可通过选择性地调节构成该装置的动力总成来实现具有中性方向的组合推力。
64.图6c示出了用于包括四个动力总成的装置的推力分布的示例。图6c示出了包括四
个并联混合动力总成621、622、623、624的船舶620。根据本示例,第一动力总成621和第四动力总成624中的第一推进单元已被朝向期望的效率点调节,该调节需要增加第一推进单元的转速并增加来自相应第二推进单元的负载(见图4,参照“p
2”)。来自第二推进单元的负载的这种增加提供了施加到第一动力总成621和第四动力总成624的第一推进单元的负制动驱动扭矩。这种速度增加已导致了图6c中的箭头所示的增加的第一推力f1和第四推力f4,这些力的大小相等。
65.同时,第二动力总成612和第三动力总成613中的第一推进单元也已被朝向期望的效率点调节,该调节需要减小第一推进单元的转速并增加来自相应第二推进单元的负载(见图4,参照“p
1”)。来自第二推进单元的负载的这种增加提供了施加到第二动力总成612的第一推进单元的负制动驱动扭矩。这种速度减小已经导致了图6c中的箭头所示的减小的第二推力f2和第三推力f3。各个动力总成621、622、623、624的旋转输出速度被控制,使得来自所有动力总成的平均旋转输出速度足以维持所请求的船速。
66.从图6c可以看到,来自第一和第四动力总成621、624的最外侧推力f1、f4的大小大于来自第二和第三动力总成622、623的最内侧推力f2、f3的大小。由于图6c中的装置包括四个动力总成,因此可以成对地运行最外侧的第一和第四动力总成、以及最内侧的第二和第三动力总成622、623。根据本示例,第一动力总成621和第四动力总成624在第二和第三动力总成622、623的两侧上,并且与船舶的中心线c
l
等距地定位,而第二和第三动力总成622、623进而在第一动力总成621和第四动力总成624内侧与中心线c
l
等距地定位。第一动力总成621和第四动力总成624以相同的旋转输出速度操作,该旋转输出速度高于最内侧的第二动力总成622和第三动力总成623的旋转输出速度。这样,可以操作这些动力总成以产生组合推力f0,该组合推力f0等于各个推力f1、f2、f3、f4的总和,并且与当前请求的转向方向一致。取决于所确定的每个单独的动力总成的效率点,可以通过选择性地调节构成该装置的动力总成来实现具有中性方向的组合推力。
67.根据本发明,船舶可以包括三个或更多个并联混合动力总成,其中,等距地位于船舶中心线的两侧上的动力总成可以成对地操作。选择以相同旋转输出速度运行的成对地对称定位的动力总成将平衡组合推力,这一原理可以应用于包括任何数量动力总成的装置。然而,本发明不限于这一原理。在本发明的范围内,还可以使该装置中的所有动力总成以不同旋转输出速度运行,只要来自所有动力总成的平均旋转输出速度足以维持所请求的船速即可。
68.根据另一示例,如果该船舶包括两个或更多个并联混合动力总成,那么,如果其余一个或多个动力总成的旋转输出速度足以维持所请求的船速,则可以使至少一个动力总成停止。
69.图7示出了说明动力总成的运行的示意图。在操作中,该方法在船舶正在操作时以初始步骤700触发。在第一步骤701中,控制单元接收指示船速的请求。在第二步骤702中,该控制单元基于所接收到的请求来确定每个第一推进单元的转速,以实现所请求的船速。在第三步骤703中,基于所确定的各个动力总成中的第一推进单元的转速,从用于每个推进单元的所存储的效率分布图中为第一推进单元和第二推进单元中的每一个来确定效率点。在第四步骤704中,分别调节每个动力系中的第一推进单元的转速,从而在维持所请求的船速的同时提高第一推进单元的效率。同时,第五步骤705涉及调节每个动力系中的对应的第二
推进单元上的负载,以提高每个动力系和整个动力系装置的效率。在第六步骤706中,控制各个动力系,使得来自所有动力总成的组合或平均旋转输出速度足以维持所请求的船速。在最后的步骤707中,如果接收到对第一推进单元的新转速的请求,则该过程返回到第一步骤。如果接收到发动机关机信号,则该方法结束。
70.本公开还涉及计算机程序、计算机程序产品以及用于计算机的存储介质,所有这些均结合计算机使用以执行所述方法。图8示出了根据本发明的一个实施例的设备840,该设备包括非易失性存储器842、处理器841以及读写存储器846。存储器842具有第一存储器部件843,用于控制该设备840的计算机程序存储在第一存储器部件843中。存储器部件843中的用于控制该设备840的计算机程序可以是操作系统。设备840可以例如被封装在控制单元中,例如图3中所示的控制单元340。数据处理单元841可以例如包括微型计算机。
71.存储器842还具有第二存储器部件844,用于控制根据本发明的目标档位选择功能的程序存储在该第二存储器部件844中。在替代实施例中,用于控制变速器的程序存储在用于数据的单独的非易失性存储介质845(例如cd或可交换的半导体存储器)中。该程序可以以可执行程序的形式或以压缩状态存储。当下文提到数据处理单元841运行特定功能时,应当清楚数据处理单元841正在运行存储在存储器844中的程序的特定部分或正在运行存储在非易失性存储介质845中的程序的特定部分。
72.数据处理单元841被定制成通过数据总线851与存储存储器845通信。数据处理单元841还被定制成通过数据总线852与存储器842通信。此外,数据处理单元841被定制成通过数据总线853与存储器846通信。数据处理单元841还被定制成通过使用数据总线854与数据端口859进行通信。根据本发明的方法可以由数据处理单元841执行,即通过该数据处理单元841运行存储在存储器844中的程序或运行存储在非易失性存储介质845中的程序来执行。
73.应当理解,本发明不限于上文所述和附图中示出的实施例;而是,本领域技术人员将认识到,可以在所附权利要求书的范围内进行许多修改和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1