一种水下缓冲机器人及其工作方法与流程
[0001]
本发明涉及机器人技术领域,尤其涉及一种水下缓冲机器人及其工作方法。
背景技术:
[0002]
随着水下机器人学及各种与机器人相关的科学技术的发展,水下机器人的研究已经取得了许多令人瞩目的成果,目前,世界上有许多国家正在致力于水下机器人的研究与开发,水下机器人的应用领域非常广泛,目前水下机器人应用领域涉及工业、渔业、探索和军事等等,水下机器人已经成为人们认识、开发和利用海洋的一个重要工具。
[0003]
水下机器人,也称无人遥控潜水器,是一种工作于水下的极限作业机器人,能潜入水中代替人完成某些操作,又称潜水器,本体上装有观测设备,如摄像机、照相机、照明灯等,潜水器的水下运动和作业,是由操作员在水面母舰上控制和监视,再通过连接器将摄像机拍摄的画面传输给岸上的工作人员。
[0004]
但在现有的水下机器人在遇到突发事件,例如遇到上坡,因其动力不足,制动轮出现打滑的现象时,水下机器人无法通过,从而导致不能继续前行,影响拍摄进度,在前行的过程中当外界物体撞到该机器人时,不能对外界的撞击力进行有效的缓冲,从而使该机器人因受到撞击而发生故障,对机器人的保护性较低,不能满足实际的使用需求。
技术实现要素:
[0005]
本发明的目的是为了解决现有的水下机器人在遇到突发事件,例如遇到上坡,因其动力不足,制动轮出现打滑的现象时,水下机器人无法通过,从而导致不能继续前行,影响拍摄进度,在前行的过程中当外界物体撞到该机器人时,不能对外界的撞击力进行有效的缓冲,从而使该机器人因受到撞击而发生故障,对机器人的保护性较低,不能满足实际的使用需求的问题,而提出的一种水下缓冲机器人及其工作方法。
[0006]
为了实现上述目的,本发明采用了如下技术方案:
[0007]
一种水下缓冲机器人及其工作方法,包括防水壳体,所述防水壳体内部一侧固定连接有第一电机,所述第一电机的输出端固定连接有第一转动杆,所述第一转动杆远离第一电机的一端通过转轴转动连接在防水壳体的内壁上,所述第一转动杆上分别固定连接有第一主动轮、第二主动轮,所述防水壳体前端转动连接有第二转动杆,所述第二转动杆的两端分别贯穿于防水壳体,且固定连接有制动轮,所述第二转动杆上固定连接有与第一主动轮相匹配的第一从动轮,所述第一主动轮与第一从动轮之间通过皮带连接。
[0008]
优选的,所述防水壳体后端通过转轴转动连接有往复螺杆,所述往复螺杆上固定连接有与第二主动轮位置相匹配的第二从动轮,所述第二主动轮与第二从动轮之间通过皮带连接,所述往复螺杆上滑动连接有移动块,所述移动块上通过转轴转动连接有伸缩杆,所述伸缩杆远离移动块的一端固定连接有仿生鱼尾板,所述仿生鱼尾板与防水壳体之间通过转轴转动连接。
[0009]
优选的,所述第一电机、第二电机均为防水电机,所述防水壳体内靠近往复螺杆的
一端固定连接有密封凹型板,所述皮带与密封凹型板之间通过密封件密封。
[0010]
优选的,所述防水壳体远离制动轮的内部下端固定连接有第二电机,所述第二电机的输出端固定连接有第三转动杆,所述第三转动杆下端固定连接有转向杆,所述转向杆两端均转动连接有转向轮,所述防水壳体前端内底部固定连接有电动升降杆,所述电动升降杆的另一端贯穿于防水壳体且连接有防水摄像机,所述防水壳体内连接有蓄电池,所述第一电机、第二电机、电动升降杆、探照灯均与蓄电池点性相接。
[0011]
优选的,所述防水壳体与第二转动杆、第三转动杆、电动升降杆之间均通过密封件密封,所述防水壳体远离仿生鱼尾板的一端连接有探照灯,所述防水壳体两侧通过转轴转动连接有防撞板,所述防撞板与防水壳体之间固定连接有缓冲弹簧,所述防撞板与防水壳体之间固定连接有缓冲弹簧的个数为2个。
[0012]
优选的,所述探照灯的个数为3个。
[0013]
优选的,所述制动轮表面设有防滑纹。
[0014]
优选的,所述防水壳体的前端为弧形结构。
[0015]
一种工作方法,主要包括以下:
[0016]
s1:在工作时,首先由潜水工作人员将该机器人移至水底,其中,防水壳体前端内底部固定连接有电动升降杆,电动升降杆的另一端贯穿于防水壳体1且连接有防水摄像机,防水壳体前端连接有探照灯,潜水工作人员首先打开探照灯对该机器人周围的环境进行照明,在控制电动升降杆,将摄像机上升到合适的位置,在打开摄像机进行拍摄;
[0017]
s2:调整好摄像机后,地面上的工作人员通过主控制器启动第一电机,使第一转动杆开始转动,在皮带的带动下,第二转动杆开始转动,进而带动制动轮开始转动,实现该机器人在水下进行移动,摄像机将拍摄的画面通过连接器传输给岸上的工作人员;
[0018]
s3:当该机器人遇到前方有礁石等障碍物时,此时工作人员启动第二电机,使第三转动杆转动一定的角度,从而带动该机器人进行转向,防止撞上障碍物,使该机器人受损,从而提高了该机器人的灵活性;
[0019]
s4:当该机器人遇到上坡动力不足,第一转动杆通过皮带带动往复螺杆转动,往复螺杆带动移动块进行左右移动,移动块通过伸缩杆与仿生鱼尾板连接,从而当移动块左右移动的同时,仿生鱼尾板也会随之摆动,为该机器人提供动力输出,使该机器人能够轻松的爬上斜坡,当制动轮出现打滑的现象时,通过仿生鱼尾板的设置,也能为该机器人提供源源不断的动力,使该机器人能够稳定的移动,从而有效的提高了该机器人的稳定性;
[0020]
s5:在前行的过程中当外界物体撞到该机器人时,通过防撞板、缓冲弹簧的设置,可以有效的对外界的撞击力进行缓冲,可将外界物体对该机器人的伤害降到最低,防止该机器人因受到撞击而发生故障,提高对该机器人的保护。
[0021]
与现有技术相比,本发明提供了一种水下缓冲机器人及其工作方法,具备以下有益效果:
[0022]
1、该种水下缓冲机器人及其工作方法,使用者在使用时,首先由潜水工作人员将该机器人移至水底,其中,防水壳体前端内底部固定连接有电动升降杆,电动升降杆的另一端贯穿于防水壳体且连接有防水摄像机,防水壳体前端连接有探照灯,潜水工作人员首先打开探照灯对该机器人周围的环境进行照明,在控制电动升降杆,将摄像机上升到合适的位置,在打开摄像机进行拍摄,调整好后,潜水人员即可返回陆地,防水壳体内部一侧固定
连接有第一电机,第一电机的输出端固定连接有第一转动杆,第一转动杆远离第一电机的一端通过转轴转动连接在防水壳体的内壁上,第一转动杆上分别固定连接有第一主动轮、第二主动轮,防水壳体前端转动连接有第二转动杆,第二转动杆的两端分别贯穿于防水壳体,且固定连接有制动轮,第二转动杆上固定连接有与第一主动轮相匹配的第一从动轮,第一主动轮与第一从动轮之间通过皮带连接,防水壳体远离制动轮的内部下端固定连接有第二电机,第二电机的输出端固定连接有第三转动杆,第三转动杆下端固定连接有转向杆,转向杆两端均转动连接有转向轮,调整好摄像机后,地面上的工作人员通过主控制器启动第一电机,使第一转动杆开始转动,在皮带的带动下,第二转动杆开始转动,进而带动制动轮开始转动,实现该机器人在水下进行移动,摄像机将拍摄的画面通过连接器传输给岸上的工作人员,当该机器人遇到前方有礁石等障碍物时,此时工作人员启动第二电机,使第三转动杆转动一定的角度,从而带动该机器人进行转向,防止撞上障碍物,使该机器人受损,从而提高了该机器人的灵活性,防水壳体后端通过转轴转动连接有往复螺杆,往复螺杆上固定连接有与第二主动轮位置相匹配的第二从动轮,第二主动轮与第二从动轮之间通过皮带连接,往复螺杆上滑动连接有移动块,移动块上通过转轴转动连接有伸缩杆,伸缩杆远离移动块的一端固定连接有仿生鱼尾板,仿生鱼尾板与防水壳体之间通过转轴转动连接,当该机器人遇到上坡动力不足,第一转动杆通过皮带带动往复螺杆转动,往复螺杆带动移动块进行左右移动,移动块通过伸缩杆与仿生鱼尾板连接,从而当移动块左右移动的同时,仿生鱼尾板也会随之摆动,为该机器人提供动力输出,使该机器人能够轻松的爬上斜坡,当制动轮出现打滑的现象时,通过仿生鱼尾板的设置,也能为该机器人提供源源不断的动力,使该机器人能够稳定的移动,从而有效的提高了该机器人的稳定性,防水壳体两侧通过转轴转动连接有防撞板,防撞板与防水壳体之间固定连接有缓冲弹簧,在前行的过程中当外界物体撞到该机器人时,通过防撞板、缓冲弹簧的设置,可以有效的对外界的撞击力进行缓冲,可将外界物体对该机器人的伤害降到最低,防止该机器人因受到撞击而发生故障,提高对该机器人的保护;
[0023]
该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现,本发明中通过仿生鱼尾板的设置,当该机器人遇到上坡动力不足,制动轮出现打滑的现象时,可以有效的为该机器人提供动力,使其能够继续前行,通过防撞板、缓冲弹簧的设置,可以有效的对外界的撞击力进行缓冲,可将外界物体对该机器人的伤害降到最低,防止该机器人因受到撞击而发生故障,使该机器人能够轻松的应对突发情况,满足实际的使用需求。
附图说明
[0024]
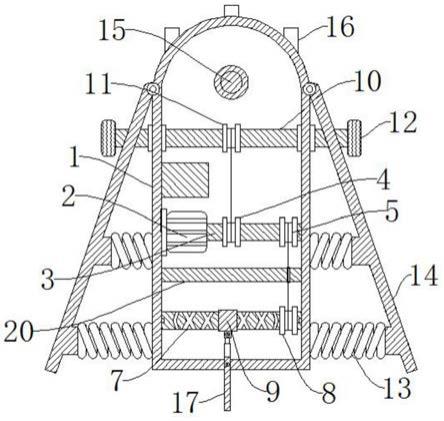
图1为本发明提出的一种水下缓冲机器人及其工作方法的结构示意图之一;
[0025]
图2为本发明提出的一种水下缓冲机器人及其工作方法的结构示意图之二;
[0026]
图3为本发明提出的一种水下缓冲机器人及其工作方法的结构示意图之三;
[0027]
图4为本发明提出的一种水下缓冲机器人及其工作方法图2中a 部分的结构示意图;
[0028]
图5为本发明提出的一种水下缓冲机器人及其工作方法图2中b 部分的结构示意图;
[0029]
图6为本发明提出的一种水下缓冲机器人及其工作方法图1中往复螺杆的结构示
意图。
[0030]
图中:1、防水壳体;2、第一电机;3、第一转动杆;4、第一主动轮;5、第二主动轮;7、往复螺杆;8、第二从动轮;9、移动块; 10、第二转动杆;11、第一从动轮;12、制动轮;13、缓冲弹簧;14、防撞板;15、电动升降杆;16、探照灯;17、仿生鱼尾板;18、转向轮;19、第二电机;20、密封凹型板;21、摄像机;22、第三转动杆; 23、转向杆;24、伸缩杆。
具体实施方式
[0031]
实施例1:
[0032]
参照图1-6,一种水下缓冲机器人及其工作方法,包括防水壳体 1,防水壳体1内部一侧固定连接有第一电机2,第一电机2的输出端固定连接有第一转动杆3,第一转动杆3远离第一电机2的一端通过转轴转动连接在防水壳体1的内壁上,第一转动杆3上分别固定连接有第一主动轮4、第二主动轮5,防水壳体1前端转动连接有第二转动杆10,第二转动杆10的两端分别贯穿于防水壳体1,且固定连接有制动轮12,第二转动杆10上固定连接有与第一主动轮4相匹配的第一从动轮11,第一主动轮4与第一从动轮11之间通过皮带连接,防水壳体1后端通过转轴转动连接有往复螺杆7,往复螺杆7上固定连接有与第二主动轮5位置相匹配的第二从动轮8,第二主动轮5与第二从动轮8之间通过皮带连接,往复螺杆7上滑动连接有移动块9,移动块9上通过转轴转动连接有伸缩杆24,伸缩杆24远离移动块9 的一端固定连接有仿生鱼尾板17,仿生鱼尾板17与防水壳体1之间通过转轴转动连接,防水壳体1远离制动轮12的内部下端固定连接有第二电机19,第二电机19的输出端固定连接有第三转动杆22,第三转动杆22下端固定连接有转向杆23,转向杆23两端均转动连接有转向轮18,防水壳体1前端内底部固定连接有电动升降杆15,电动升降杆15的另一端贯穿于防水壳体1且连接有防水摄像机21,防水壳体1与第二转动杆10、第三转动杆22、电动升降杆15之间均通过密封件密封,防水壳体1远离仿生鱼尾板17的一端连接有探照灯 16,防水壳体1两侧通过转轴转动连接有防撞板14,防撞板14与防水壳体1之间固定连接有缓冲弹簧13。
[0033]
使用者在使用时,首先由潜水工作人员将该机器人移至水底,其中,防水壳体1前端内底部固定连接有电动升降杆15,电动升降杆 15的另一端贯穿于防水壳体1且连接有防水摄像机21,防水壳体1 前端连接有探照灯16,潜水工作人员首先打开探照灯16对该机器人周围的环境进行照明,在控制电动升降杆15,将摄像机21上升到合适的位置,在打开摄像机21进行拍摄,调整好后,潜水人员即可返回陆地,防水壳体1内部一侧固定连接有第一电机2,第一电机2的输出端固定连接有第一转动杆3,第一转动杆3远离第一电机2的一端通过转轴转动连接在防水壳体1的内壁上,第一转动杆3上分别固定连接有第一主动轮4、第二主动轮5,防水壳体1前端转动连接有第二转动杆10,第二转动杆10的两端分别贯穿于防水壳体1,且固定连接有制动轮12,第二转动杆10上固定连接有与第一主动轮4相匹配的第一从动轮11,第一主动轮4与第一从动轮11之间通过皮带连接,防水壳体1远离制动轮12的内部下端固定连接有第二电机19,第二电机19的输出端固定连接有第三转动杆22,第三转动杆22下端固定连接有转向杆23,转向杆23两端均转动连接有转向轮18,调整好摄像机21后,地面上的工作人员通过主控制器启动第一电机2,使第一转动杆3开始转动,在皮带的带动下,第二转动杆10开始转动,进而带动制动轮12开始转动,实现该机器人在水下进行移动,摄像机21将拍摄的画面通过连接器传输给岸上的工作人员,当该机器人遇到前方有礁石等障碍
物时,此时工作人员启动第二电机19,使第三转动杆22转动一定的角度,从而带动该机器人进行转向,防止撞上障碍物,使该机器人受损,从而提高了该机器人的灵活性,防水壳体1后端通过转轴转动连接有往复螺杆7,往复螺杆7上固定连接有与第二主动轮5位置相匹配的第二从动轮8,第二主动轮5与第二从动轮8之间通过皮带连接,往复螺杆7上滑动连接有移动块9,移动块9上通过转轴转动连接有伸缩杆24,伸缩杆24远离移动块9 的一端固定连接有仿生鱼尾板17,仿生鱼尾板17与防水壳体1之间通过转轴转动连接,当该机器人遇到上坡动力不足,第一转动杆3通过皮带带动往复螺杆7转动,往复螺杆7带动移动块9进行左右移动,移动块9通过伸缩杆24与仿生鱼尾板17连接,从而当移动块9左右移动的同时,仿生鱼尾板17也会随之摆动,为该机器人提供动力输出,使该机器人能够轻松的爬上斜坡,当制动轮12出现打滑的现象时,通过仿生鱼尾板17的设置,也能为该机器人提供源源不断的动力,使该机器人能够稳定的移动,从而有效的提高了该机器人的稳定性,防水壳体1两侧通过转轴转动连接有防撞板14,防撞板14与防水壳体1之间固定连接有缓冲弹簧13,在前行的过程中当外界物体撞到该机器人时,通过防撞板14、缓冲弹簧13的设置,可以有效的对外界的撞击力进行缓冲,可将外界物体对该机器人的伤害降到最低,防止该机器人因受到撞击而发生故障,提高对该机器人的保护。
[0034]
实施例2:
[0035]
参照图1-6,一种水下缓冲机器人及其工作方法,与实施例1基本相同,更进一步的是:第一电机2、第二电机19均为防水电机,防止第一电机2、第二电机19内部进水,影响工作进度。
[0036]
实施例3:
[0037]
参照图1-6,一种水下缓冲机器人及其工作方法,与实施例1基本相同,更进一步的是:防水壳体1内靠近往复螺杆7的一端固定连接有密封凹型板20,皮带与密封凹型板20之间通过密封件密封,对该机器人中的零件进行隔水,防止零件遇水生锈,从而导致零件故障,保证该机器人的正常运行。
[0038]
实施例4:
[0039]
参照图1-6,一种水下缓冲机器人及其工作方法,与实施例1基本相同,更进一步的是:防水壳体1内连接有蓄电池,第一电机2、第二电机19、电动升降杆15、探照灯16均与蓄电池点性相接,为该机器人中的用电元件进行供电。
[0040]
实施例5:
[0041]
参照图1-6,一种水下缓冲机器人及其工作方法,与实施例1基本相同,更进一步的是:防撞板14与防水壳体1之间固定连接有缓冲弹簧13的个数为2个,进一步提高防撞板14的防撞效果,提高其稳定性。
[0042]
实施例6:
[0043]
参照图1-6,一种水下缓冲机器人及其工作方法,与实施例1基本相同,更进一步的是:探照灯16的个数为3个,为摄像机21提供照明,增大其探照的亮度,使摄像机21拍摄的更加清晰。
[0044]
实施例7:
[0045]
参照图1-6,一种水下缓冲机器人及其工作方法,与实施例1基本相同,更进一步的是:制动轮12表面设有防滑纹,提高制动轮12 的抓地力,防止打滑,提高了该机器人的稳定
性。
[0046]
实施例8:
[0047]
参照图1-6,一种水下缓冲机器人及其工作方法,与实施例1基本相同,更进一步的是:防水壳体1的前端为弧形结构,有效的降低了水下水流对该机器人的阻力,使该机器人能够稳定移动。
[0048]
需要注意的是,该专利申请文件中电器元件均为与外界的主控器连接,并且主控器可为计算机等起到控制的常规已知设备,另外需要说明的是上述实施方式中第一电机2、第二电机19均可采用但不限于型号为90yr120gy38的正反转电机,电动升降杆15可采用但不限于型号为ynt-03的电动伸缩柱;
[0049]
本发明中通过仿生鱼尾板17的设置,当该机器人遇到上坡动力不足,制动轮12出现打滑的现象时,可以有效的为该机器人提供动力,使其能够继续前行,通过防撞板14、缓冲弹簧13的设置,可以有效的对外界的撞击力进行缓冲,可将外界物体对该机器人的伤害降到最低,防止该机器人因受到撞击而发生故障,使该机器人能够轻松的应对突发情况,满足实际的使用需求。
[0050]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1