一种海洋浮标系统及电压反馈调节方法
1.本发明涉及海洋监测设备技术领域,具体涉及一种海洋浮标系统及电 压反馈调节方法。
背景技术:
2.海洋中蕴含着极其丰富的各类资源,而海洋浮标是进行海洋探索的重 要海洋装备之一,其上携带多种监测传感器及配套设备,可以对其所在海 域进行水质、盐分、浊度、气象、水文、等多项参数的实时在线原位监测, 并通过gprs、北斗短报文进行通讯,将监测信息传输至终端系统。
3.为了从多层次、多角度采集海洋数据,海洋浮标系统除了其海面交界 处的浮标体部分,还会在海面以下,在海洋剖面上布放更多的传感器,来 监测不同深度下海洋的各类参数。这些传感器往往通过单根电能与信号复 合的电缆,与海面的浮标体进行穿仓连接。而海洋环境复杂多变,海浪、 海水腐蚀等恶劣环境严重威胁海洋浮标的使用寿命,其中电缆与海洋浮标 的相连处,是最为脆弱易损的部位之一。因此设计一种可以避免电缆与浮 标体连接处受损破坏的海洋浮标系统,将大大延长海洋浮标的使用寿命和 使用成本。
4.海洋浮标系统布放在海面之上,无时无刻不在随着波浪倾斜摇摆和旋 转。因此浮标与电缆的连接处,会发生弯折、扭转,从而造成磨损、缠绕、 断裂等损伤。目前,为了避免浮标电缆弯折扭曲从而破损的情况,有几种 常见的连接方式。
5.公告号为cn105691556b的专利说明书中公开了一种海洋环境噪声源 记录浮标,浮标与电缆采用硬连接的方式,电缆直接从浮标腔体内穿出, 这种结构导致海面浮标任何摆动旋转,都会直接作用于电缆连接处,电缆 完全依靠自身的保护材质来抵抗风浪作用,采用高强度的特种电缆会大大 增加浮标系统的使用成本,同时尽管特种电缆强度较高,但依然很难抵抗 日积月累的疲劳损伤;
6.公告号为cn106965905b的专利说明书中公开了一种海洋声学测量浮 标系统,包括浮体、仪器舱、受力器、集成式单条电缆阵,浮体嵌在仪器 舱上部的外侧,仪器舱下面通过受力器连接集成式单条电缆阵,集成式单 条电缆阵上设置声学传感器,声学传感器的信号线连接仪器舱的控制装置, 集成式单条电缆阵阵体下端悬挂铅鱼;该方案在舱体下面通过受力器连接 集成式单条电缆,可以起到一定的缓冲作用,但是专利中受力器的过缆端 件处的电缆依然是硬连接,因此缓冲效果有限,并不能从根本上解决上述 问题。
7.公开号为cn111976897a的专利说明书中公开了一种浮标基海洋观测 系统,包括水面浮标、系留机电缆、水体观测节点及海底观测节点,所述 系留机电缆的两端分别连接所述水面浮标及所述海底观测节点,所述水体 观测节点设置于所述系留机电缆的中间部位,所述水面浮标的能源经所述 系留机电缆传输至所述水体观测节点及海底观测节点,所述水体观测节点 将采集的水体数据及所述海底观测节点将采集的海底数据经所述系留机 电缆传输至所述水面浮标。该方案在浮标腔体与电缆连接处使用了一种万 向节结构,万向节虽然可以抵消海面浮标的倾斜摆动等姿态,但是无法消 除扭转作用对电缆造成的损伤。
技术实现要素:
8.本发明的一个目的在于提供一种基于非接触式电能与信号传输的海 洋浮标系统,可以在海浪的影响下,在一定范围内自由倾斜或旋转,而不 会造成下方海缆的弯折、扭曲,从而大大延长海洋浮标系统的使用寿命, 降低使用成本。
9.一种海洋浮标系统,包括浮标主体,其特征在于,所述浮标主体底部 设置有浮标球头座,所述浮标球头座内设置有与其活动连接的浮标球头; 浮标球头座外表面绕制有球形初级线圈,浮标球头内设有空腔且内表面绕 制有与所述初级线圈耦合的球形次级线圈;
10.浮标主体内设置有与初级线圈电连接的初级电路;浮标球头底部连接 有次级电路腔,次级电路腔内设置有与次级线圈电连接的次级电路,次级 电路还电连接有水下电缆,水下电缆上电连接有若干传感器。
11.本方案中,电缆与浮标主体之间采用活动连接的方式,避免了传统硬 连接方式造成的电缆扭伤;同时,电磁耦合器采用的是“球形”线圈,大 大提高了耦合系数,并且无磁芯的设计也使系统传输更加稳定,损耗更小, 效率更高。
12.作为优选,所述初级线圈和次级线圈均采用利兹线,即以聚氨酯漆包 线为芯的涤纶丝包线。利兹线是使用多股相互绝缘的单线绞合而成,避免 高频电流在导线中由于“趋肤效应”和“邻近效应”引起的损耗,其外部 缠绕的涤纶丝可以起到良好的绝缘效果。
13.作为优选,所述水下电缆上设置有配重块。
14.作为优选,所述浮标球头与浮标主体接触部位设置有防水罩。
15.作为优选,所述初级电路包括对信号进行调制的信号调制模块,所述 次级电路包括对信号进行解调的信号解调模块。
16.本发明的另一目的在于提供一种电压反馈调节方法,反馈电路通过采 样获得次级侧当前的电力参数,并将其传输至初级侧的控制器,此时控制 器根据当前次级侧的电力参数与目标参数的差值,改变其输出的pwm驱动 信号的占空比。
17.作为优选,当次级侧输出电压降低时,初级侧控制器会使驱动信号的 占空比增大,从而使逆变器的功率管的导通时间增加,以令逆变电路的输 出电压增加,次级侧通过电磁耦合器接收到的电压会同步增加,来弥补耦 合状况变化导致的电压降低;当次级侧电压升高时,反馈调节的过程与上 述相反;系统的闭环传递函数为
[0018][0019]
其中,uo为输出电压,u
′o为给定电压值,ka为电压放大倍数,kv为 驱动与逆变器的等效电压放大系数,k
mv
为电磁耦合器的电压传输系数, kr为整流器的等效电压变换系数,k
α
为反馈传输途径中的等效电压变换 系数,t
α
为反馈信号传输的延迟时间,td为系统总延迟时间,tc为整流滤 波环节的等效时间常数。
[0020]
作为优选,所述控制器产生4路pwm信号。
[0021]
本发明的有益效果:
[0022]
浮标主体和电缆连接处通过球头的电磁耦合结构,而非传统的“硬连 接”。当浮标在海面上因为风浪摇摆旋转的时候,球头结构可以在多个自 由度上随动,使得海面以下的长电缆线保持竖直方向不动,避免了电缆弯 折扭曲破坏的情况。
[0023]
同时电磁耦合器采用的是“球形”线圈,大大提高了耦合系数,并且 无磁芯的设计
也使系统传输更加稳定,损耗更小,效率更高。
附图说明
[0024]
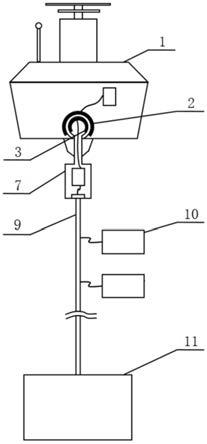
图1为本发明浮标系统的结构示意图;
[0025]
图2为本发明浮标系统的传输系统示意图;
[0026]
图3为球头耦合结构的剖视图;
[0027]
图4为初级系统与次级系统组成示意图;
[0028]
图5为非接触电能传输电压反馈控制系统动态结构图;
[0029]
图6为信号调制解调示意图。
[0030]
具体实施方式
[0031]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进 行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例, 而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没 有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的 范围。
[0032]
如图1-3所示,一种海洋浮标系统,基于非接触式的电能与信号传输, 包括浮标主体1,浮标主体1底部设置有浮标球头座2,浮标球头座2内 设置有与其活动连接的浮标球头3;浮标球头座2外表面绕制有球形初级 线圈4,浮标球头3内设有空腔且内表面绕制有与初级线圈4耦合的球形 次级线圈5。
[0033]
在结构强度方面,球头结构与常规球铰结构区别不大,浮标球头3由 于内部中空,与常规的实心球头相比,结构强度可能会受影响,但是其与 常规实心球头的工况又有区别,常规实心球头工作时常需承受较大载荷, 而浮标中的中空浮标球头3下方连接的电缆在海水中有浮力,整体载荷不 大。因此球头中空对结构强度造成的影响较小。
[0034]
在连接接触面方面,线圈不与其球头和球头座受力部分相接触,因而 不会影响接触面接触。
[0035]
浮标主体1内设置有与初级线圈4电连接的初级电路6;浮标球头3 底部连接有次级电路腔7,次级电路腔7内设置有与次级线圈5电连接的 次级电路8,次级电路8还通过线缆转接头13电连接有水下电缆9,水下 电缆9上电连接有若干传感器10。
[0036]
在浮标腔体内,系统组成示意图如图5所示,通信部分通过信号调制 模块,将信号载波加载到功率载波上。经过初级侧的谐振补偿,传递给初 级线圈,由初级线圈将通信信号发射出去。次级线圈接收到初级线圈发射 的电磁波后,首先通过信号解调模块将信号解调出来,随后再通过整流滤 波将交流电转化为直流电,传向后级水下电缆,再由水下电缆将电能和信 号传输给海下传感器。信号调制解调过程如图6所示。
[0037]
本实施例中,初级线圈4次级线圈5采用利兹线。利兹线是使用多股 相互绝缘的单线绞合而成,避免高频电流在导线中由于“趋肤效应”和“邻 近效应”引起的损耗,其外部缠绕的涤纶丝可以起到良好的绝缘效果。
[0038]
本实施例中,水下电缆9设置有配重块11,浮标球头3浮标主体1 触部位设置有防水罩12。
[0039]
由于海面上时时刻刻都有波浪,导致浮标主体1与水下电缆9部分一 直会存在相对运动。因此初级线圈4和次级线圈5之间的耦合状况也会不 停变化。该变化会导致次级输出电压不稳定,从而使次级测的用电传感器 的工作稳定性受影响。为了使次级侧的输出电压保持稳定,满足传感器的 供电要求,采用了闭环反馈控制系统,来对电压实施反馈调节。
[0040]
一种电压反馈调节方法,反馈控制系统的原理示意图如图4所示;控 制器负责接收次级侧的输出电压,并与预设电压进行比较,根据两者的差 值调节输出的pwm信号来控制逆变器,从而利用反馈系统使次级输出电压 保持稳定。
[0041]
控制系统的动态结构图如图5所示;由图可以得到系统的开环传递函 数为
[0042][0043]
其中,ka为电压放大倍数,kv为驱动与逆变器的等效电压放大系数, k
mv
为电磁耦合器的电压传输系数,kr为整流器的等效电压变换系数,k
α 为反馈传输途径中的等效电压变换系数,t
α
为反馈信号传输的延迟时间, td为系统总延迟时间,tc为整流滤波环节的等效时间常数。
[0044]
如果反馈环节延时时间t
α
比较小,为了便于分析,当系统的截止频率 满足时,可以将电压反馈环节的传递函数近似成一阶惯性环节, 即
[0045][0046]
其中,u
o3
为输出电压反馈值,uo为输出电压;这样g(s)的表达式就 可以近似写成
[0047][0048]
因此图4所示系统的闭环传递函数为
[0049][0050]
其中,u
′o为给定电压值。
[0051]
当系统进行电能传输时,其控制器产生4路pwm信号,通过驱动元件 施加在逆变器的功率管上,外接条件不变的情况下,这4路pwm信号的占 空比是不变的。当浮标受到风浪的影响产生摇摆时,电路的耦合情况发生 改变,次级侧的电压和功率等参数也发生改变。此时反馈电路通过采样获 得次级侧当前的电力参数,并将其传输至初级侧的控制器,此时控制器会 根据当前次级侧的电力参数与目标参数的差值,改变其输出的pwm驱动信 号的占空比。当次级侧输出电压降低时,初级侧控制器会使驱动信号的占 空比增大,从而使逆变器的功率管的导通时间增加,这样就可以令逆变电 路的输出电压增加,次级侧通过电磁耦合器接收到的电压也会同步增加, 来弥补耦合状况变化导致的电压降低。当次级侧电压升高时,反馈调节的 过程与其相反,但最终结果都会使次级侧输出电压稳定于设定的目标电压。 通过这样的占空比调节方式即可实现系统电能的闭环反馈控制。
[0052]
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术 人员来说,
其依然可以对前述各实施例所记载的技术方案进行修改,或者 对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作 的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1