海洋声学主动发射系统用可组网的悬浮式浮标测量装置及方法与流程
1.本发明属于海洋声学技术领域,尤其涉及一种测量装置及方法。
背景技术:
2.海洋是广阔水体区域的总称,地球上绝大部分被海洋覆盖,海洋内也有许多海洋生物,海洋有效维护了地球良好的生态圈平衡,不同区域的海洋的深度也不相同,为了对于海洋深度进行探测,海洋声学派上了用场,利用声波探测海洋不仅能测出大海的深度,甚至还能发现蕴藏在海底的石油,使用效果好,在进行海洋深度测量时,海洋声学仪器需要安装在某一载体上,悬浮式浮标测量装置则是很好的安装载体。
3.中国专利公开了(cn202010961542.0)具有收/发功能的悬浮式海洋环境声学特性综合测量装置,包括太阳能电板、浮体罐、蓄电池及充电器、电缆滑动水密件、盐度传感器、温度传感器、压力传感器、锚块、集成电缆、矢量水听器、电缆轮、减速机、伺服电机、控制器、数据处理模块、gps模块、北斗通讯模块、gps天线、北斗通讯天线,、所述的电缆轮、减速机、伺服电机安装在浮体罐下部可拆卸底板上方,伺服电机的输出端接减速机,减速机输出端设置电缆轮,集成电缆一端与数据采集与处理模块相连,经电缆轮、电缆滑动水密件进入海水,其末端设有锚块,集成电缆上分别设有温度传感器、盐度传感器、矢量水听器、压力传感器,温度传感器、盐度传感器、矢量水听器、压力传感器采集的数据经集成电缆送到数据采集与处理模块,经处理后再送到控制器,控制器分别与蓄电池、gps模块、北斗通讯模块、数据采集与处理模块相连,gps天线、北斗通讯天线设于浮体罐上部,太阳能电板设置于浮体罐上部,太阳能发电装置经充电器对蓄电池充电,该装置不需试验船时时追随,自带补给电源,可长时间无人值守,自动测试不同海层各种声学参数。通过数据处理模块可分析出海洋环境的声速及声速发布、海水声吸收、声衰减、风浪噪声、海洋辐射噪声以及间歇源引起的海洋环境噪声变化等,同时亦可开阔深海区和近海岸海区环境噪声的测量,但该装置在其上并未设置有自动展开的浮力结构,该浮标在使用时,由于海上的流速不稳定,在有一些波浪时,该装置的稳定性得不到保障,需要进行一定改进。
技术实现要素:
4.本发明的目的在于:为了解决传统的测量装置在其上并未设置有自动展开的浮力结构,该浮标在使用时,由于海上的流速不稳定,在有一些波浪时,测量装置的稳定性得不到保障的问题,而提出的海洋声学主动发射系统用可组网的悬浮式浮标测量装置及方法。
5.为了实现上述目的,本发明采用了如下技术方案:海洋声学主动发射系统用可组网的悬浮式浮标测量装置,包括顶壳、浮标主体和供电模块,所述浮标主体的底部固定安装有底浮座,所述底浮座的两侧外壁上均设置有侧浮块,所述浮标主体的四侧外壁上均设置有监控组件,所述浮标主体的正面与背面外壁上均固定安装有超声波距离探测器,所述浮标主体的侧壁上开设有安装侧槽,所述安装侧槽内镶嵌安装有第二磁铁板,所述监控组件
上方位于安装侧槽内设置有浮力组件,所述浮标主体的内部固定安装有偏转马达、单片机与gps定位芯片,所述偏转马达的输出轴一端通过转轴固定安装有侧定位组件,所述浮标主体的后侧外壁上设置有牵引绳。
6.作为上述技术方案的进一步描述:
7.所述浮标主体的顶部固定安装有顶壳,所述顶壳两侧设置有斜面,斜面上开设有顶槽,所述顶槽的内部镶嵌安装有光伏板。
8.作为上述技术方案的进一步描述:
9.所述监控组件包括监控盒与浸没式压力传感器,所述监控盒的内部固定安装有浸没式压力传感器,所述浸没式压力传感器的外部设置有数据线,所述数据线一端与浮标主体的内部连接。
10.作为上述技术方案的进一步描述:
11.所述浮力组件包括浮力板、侧安装轴、连接弹簧与第一磁铁板,所述浮力板的一侧外壁上固定安装有第一磁铁板。
12.作为上述技术方案的进一步描述:
13.所述浮力板的内部插置安装有侧安装轴,所述侧安装轴的一端转动安装有轴架,所述轴架的一端与浮标主体的侧壁固定连接。
14.作为上述技术方案的进一步描述:
15.所述浮力板的底面与浮标主体的侧壁之间安装有连接弹簧,所述第一磁铁板与第二磁铁板的大小规格一致,所述第一磁铁板与第二磁铁板的磁极相反。
16.作为上述技术方案的进一步描述:
17.所述侧定位组件包括转动外轴与侧挡头,所述转动外轴的一端固定安装有侧挡头,所述侧挡头的一端与浮力组件的侧壁紧密接触并挤压。
18.作为上述技术方案的进一步描述:
19.所述顶壳的内部设置有数据监测模块、数据处理模块与数据反馈模块,所述供电模块的输出端与数据监测模块的输入端电性连接,所述数据监测模块的输出端与数据处理模块的输入端电性连接,所述数据处理模块的输出端分别与单片机及数据反馈模块的输入端电性连接,所述单片机的输出端与偏转马达的输入端电性连接,所述数据反馈模块的与接收终端之间通过5g网络连接,所述接收终端为手机、笔记本电脑中的一种或多种。
20.作为上述技术方案的进一步描述:
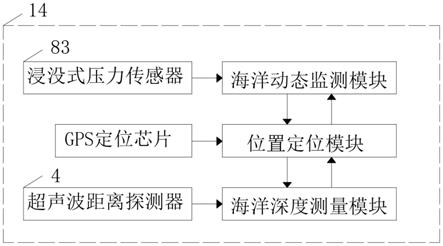
21.所述数据监测模块包括海洋动态监测模块、位置定位模块与海洋深度测量模块,所述海洋动态监测模块与位置定位模块双向电性连接,所述位置定位模块与海洋深度测量模块双向电性连接,所述浸没式压力传感器的输出端与海洋动态监测模块的输入端电性连接,所述gps定位芯片的输出端与位置定位模块的输入端电性连接,所述超声波距离探测器的输出端与海洋深度测量模块的输入端电性连接。
22.本发明还公开了海洋声学主动发射系统用可组网的悬浮式浮标测量装置的使用方法,包括如下步骤:
23.s1、在该装置使用时,置于海平面上,若海平面上流速发生突变时,不稳定的水流会进入监控组件内,此时监控组件内的浸没式压力传感器会对于流水进行监测,当流水浸没监控组件内后,浸没式压力传感器监测到水压足够后,数据快速传送;
24.s2、单片机会控制偏转马达开启,偏转马达可带动其一端的侧定位组件发生偏转,偏转后浮力组件失去限定,该浮力组件自身由于连接弹簧的回复力自动偏转,实现浮力组件的自动释放,并搭在水面上,完成装置与水体接触面积的自动扩展;
25.s3、第二磁铁板与第一磁铁板磁极相异,第二磁铁板可对于浮力组件产生一定反作用推力,与连接弹簧共同使该浮力组件稳定浮在水面上;
26.s4、装置使用时,可对装置所处位置进行实时定位,从而对测量海域精确位置进行捕捉,在进行定位后进行测量,测量后,定位信息与测量信息通过5g网络反馈至工作人员的移动设备,以使工作人员对测量及位置信息进行捕捉。
27.综上所述,由于采用了上述技术方案,本发明的有益效果是:
28.1、本发明中,通过在装置外设置有浮力组件,在该装置使用时,置于海平面上,若海平面上流速发生突变时,不稳定的水流会进入监控组件内,此时监控组件内的浸没式压力传感器会对于流水进行监测,当流水浸没监控组件内后,浸没式压力传感器监测到水压足够后,数据快速传送,单片机会控制偏转马达开启,偏转马达可带动其一端的侧定位组件发生偏转,偏转后,浮力组件失去限定,该浮力组件自身由于连接弹簧的回复力,可自动偏转,实现浮力组件的自动释放,搭在水面上,设计合理、巧妙,可有效实现自动监测与自动扩展装置与水体的接触面积的功能,大大提高了该装置的稳定性,保证测量的稳定与精度。
29.2、本发明中,通过在浮力组件的内侧设置有第一磁铁板,在安装侧槽内设置有第二磁铁板,由于第二磁铁板与第一磁铁板的磁极相异的缘由,第二磁铁板可对于浮力组件产生一定反作用推力,与连接弹簧的共同作用可使该浮力组件可稳定地浮在水面上,不会由于水流的波动而使浮力组件发生不稳定的偏转震动,保证了该浮力组件的本身的使用效果。
30.3、本发明中,通过在内部设置有gps定位芯片,在该装置使用时,可对于装置所处位置进行实时定位,从而可有效对于测量海域精确位置进行捕捉,在进行定位后,进行测量,测量后,定位信息与测量信息可捆绑通过5g网络进行反馈,反馈至工作人员的移动设备内,便于工作人员对于不同位置测量数据的了解,提高该装置的信息转化效率,保证信息的精确性。
附图说明
31.图1为海洋声学主动发射系统用可组网的悬浮式浮标测量装置的立体结构示意图。
32.图2为海洋声学主动发射系统用可组网的悬浮式浮标测量装置中偏转马达与侧定位组件的放大立体结构示意图。
33.图3为海洋声学主动发射系统用可组网的悬浮式浮标测量装置中a处的放大结构示意图。
34.图4为海洋声学主动发射系统用可组网的悬浮式浮标测量装置的局部爆炸立体结构示意图。
35.图5为海洋声学主动发射系统用可组网的悬浮式浮标测量装置中监控组件的放大立体结构示意图。
36.图6为海洋声学主动发射系统用可组网的悬浮式浮标测量装置的工作原理模块结
构示意图。
37.图7为海洋声学主动发射系统用可组网的悬浮式浮标测量装置中数据监测模块的子模块结构示意图。
38.图例说明:
39.1、顶壳;2、光伏板;3、顶槽;4、超声波距离探测器;5、浮力组件;51、浮力板;52、侧安装轴;53、轴架;54、连接弹簧、55、第一磁铁板;6、浮标主体;7、侧浮块;8、监控组件;81、数据线;82、监控盒;83、浸没式压力传感器;9、侧定位组件;91、侧挡头;92、转动外轴;10、底浮座;11、偏转马达;12、第二磁铁板;13、牵引绳;14、数据监测模块;15、安装侧槽。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
41.请参阅图1
‑
7,本发明提供一种技术方案:海洋声学主动发射系统用可组网的悬浮式浮标测量装置,包括顶壳1、浮标主体6和供电模块,所述浮标主体6的底部固定安装有底浮座10,所述底浮座10的两侧外壁上均设置有侧浮块7,所述浮标主体6的四侧外壁上均设置有监控组件8,所述浮标主体6的正面与背面外壁上均固定安装有超声波距离探测器4,所述浮标主体6的侧壁上开设有安装侧槽15,所述安装侧槽15内镶嵌安装有第二磁铁板12,所述监控组件8上方位于安装侧槽15内设置有浮力组件5,所述浮标主体6的内部固定安装有偏转马达11、单片机与gps定位芯片,所述偏转马达11的输出轴一端通过转轴固定安装有侧定位组件9,所述浮标主体6的后侧外壁上设置有牵引绳13,所述浮标主体6的顶部固定安装有顶壳1,所述顶壳1两侧设置有斜面,斜面上开设有顶槽3,所述顶槽3的内部镶嵌安装有光伏板2,该光伏板2可有效对于太阳光进行捕捉,转化为电能,供该装置使用,有效节约能源。
42.所述监控组件8包括监控盒82与浸没式压力传感器83,所述监控盒82的内部固定安装有浸没式压力传感器83,所述浸没式压力传感器83的外部设置有数据线81,所述数据线81一端与浮标主体6的内部连接,所述浮力组件5包括浮力板51、侧安装轴52、连接弹簧54与第一磁铁板55,所述浮力板51的一侧外壁上固定安装有第一磁铁板55,所述浮力板51的内部插置安装有侧安装轴52,所述侧安装轴52的一端转动安装有轴架53,所述轴架53的一端与浮标主体6的侧壁固定连接,所述浮力板51的底面与浮标主体6的侧壁之间安装有连接弹簧54,所述侧定位组件9包括转动外轴92与侧挡头91,所述转动外轴92的一端固定安装有侧挡头91,所述侧挡头91的一端与浮力组件5的侧壁紧密接触并挤压,其中,连接弹簧54在浮力板51的底部,且根据附图3可见,连接弹簧54为环状弹簧,连接弹簧54的一端与浮力板51的底面固定连接,一端延伸至浮标主体6的内部。
43.请参阅图1
‑
5,其具体实施方式为:通过设置有监控组件8,该监控组件8包括监控盒82与浸没式压力传感器83,通过设置有浮力组件5,该浮力组件5包括浮力板51、侧安装轴52、连接弹簧54与第一磁铁板55,通过设置有侧定位组件9,该侧定位组件9包括转动外轴92与侧挡头91,在该装置使用时,置于海平面上,若海平面上流速发生突变时,不稳定的水流会进入监控组件8内,此时监控组件8内的浸没式压力传感器83会对于流水进行监测,当流
水浸没监控组件8内后,浸没式压力传感器83监测到水压足够后,数据快速传送,单片机会控制偏转马达11开启,偏转马达11可带动其一端的侧定位组件9发生偏转,偏转后,浮力组件5失去限定,该浮力组件5自身由于连接弹簧54的回复力,可自动偏转,实现浮力组件5的自动释放,搭在水面上,完成装置与水体接触面积的自动扩展。
44.所述第一磁铁板55与第二磁铁板12的大小规格一致,所述第一磁铁板55与第二磁铁板12的磁极相反。
45.请参阅图1
‑
4,其具体实施方式为:由于第二磁铁板12与第一磁铁板55的磁极相异的缘由,第二磁铁板12可对于浮力组件5产生一定反作用推力,与连接弹簧54的共同作用可使该浮力组件5可稳定地浮在水面上,不会由于水流的波动而使浮力组件5发生不稳定的偏转震动。
46.所述顶壳1的内部设置有数据监测模块14、数据处理模块与数据反馈模块,所述供电模块的输出端与数据监测模块14的输入端电性连接,所述数据监测模块14的输出端与数据处理模块的输入端电性连接,所述数据处理模块的输出端分别与单片机及数据反馈模块的输入端电性连接,所述单片机的输出端与偏转马达11的输入端电性连接,所述数据反馈模块的与接收终端之间通过5g网络连接,所述接收终端为手机、笔记本电脑中的一种或多种,所述数据监测模块14包括海洋动态监测模块、位置定位模块与海洋深度测量模块,所述海洋动态监测模块与位置定位模块双向电性连接,所述位置定位模块与海洋深度测量模块双向电性连接,所述浸没式压力传感器83的输出端与海洋动态监测模块的输入端电性连接,所述gps定位芯片的输出端与位置定位模块的输入端电性连接,所述超声波距离探测器4的输出端与海洋深度测量模块的输入端电性连接。
47.请参阅图6
‑
7,其具体实施方式为:装置使用时,可对于装置所处位置进行实时定位,从而可有效对于测量海域精确位置进行捕捉,在进行定位后,进行测量,测量后,定位信息与测量信息可捆绑通过5g网络进行反馈,反馈至工作人员的移动设备内,工作人员可对于测量及位置信息进行捕捉。
48.本发明还公开了海洋声学主动发射系统用可组网的悬浮式浮标测量方法(方法实施例,也可以说是海洋声学主动发射系统用可组网的悬浮式浮标测量装置的使用方法),包括如下步骤:
49.s1、在该装置使用时,置于海平面上,若海平面上流速发生突变时,不稳定的水流会进入监控组件8内,此时监控组件8内的浸没式压力传感器83会对于流水进行监测,当流水浸没监控组件8内后,浸没式压力传感器83监测到水压足够后,数据快速传送;
50.s2、单片机会控制偏转马达11开启,偏转马达11可带动其一端的侧定位组件9发生偏转,偏转后,浮力组件5失去限定,该浮力组件5自身由于连接弹簧54的回复力,可自动偏转,实现浮力组件5的自动释放,搭在水面上,完成装置与水体接触面积的自动扩展;
51.s3、由于第二磁铁板12与第一磁铁板55的磁极相异的缘由,第二磁铁板12可对于浮力组件5产生一定反作用推力,与连接弹簧54的共同作用可使该浮力组件5可稳定地浮在水面上,不会由于水流的波动而使浮力组件5发生不稳定的偏转震动;
52.s4、装置使用时,可对于装置所处位置进行实时定位,从而可有效对于测量海域精确位置进行捕捉,在进行定位后,进行测量,测量后,定位信息与测量信息可捆绑通过5g网络进行反馈,反馈至工作人员的移动设备内,工作人员可对于测量及位置信息进行捕捉。
53.实施例中,需要说明的是:对于侧浮块7进行加长设计,与轮船的设计类似,在平常该装置置于海面上时,底浮座10的部分会浸没于海面以下,海面上的水体距离监控组件8还是具有一定距离,当海面上有常规波浪时,该结构会随着波浪同时发生跃起或者下沉,水流不会进入与海面有一定距离的监控组件8内,文中方法实施例中步骤s1中说明的是若海平面上流速发生突变时,此时水流极不稳定,此时会进入监控组件8内,同时通过浸没式压力传感器83对于水体进行监测,当水流完全浸没该浸没式压力传感器83,此时判定水流已经很大程度的侵浸该结构主体,从而判断自动打开浮力组件,可有效实现自动监测与自动扩展装置与水体的接触面积的功能,大大提高了该装置的稳定性,可避免/减少由于一些随浪进入监控组件8内,造成的监测结果不精确的情况发生,以保证测量稳定性。
54.工作原理:在该装置使用时,置于海平面上,若海平面上流速发生突变时,不稳定的水流会进入监控组件8内,此时监控组件8内的浸没式压力传感器83会对于流水进行监测,当流水浸没监控组件8内后,浸没式压力传感器83监测到水压足够后,数据快速传送,单片机会控制偏转马达11开启,偏转马达11可带动其一端的侧定位组件9发生偏转,偏转后,浮力组件5失去限定,该浮力组件5自身由于连接弹簧54的回复力,可自动偏转,实现浮力组件5的自动释放,搭在水面上,完成装置与水体接触面积的自动扩展,由于第二磁铁板12与第一磁铁板55的磁极相异的缘由,第二磁铁板12可对于浮力组件5产生一定反作用推力,与连接弹簧54的共同作用可使该浮力组件5可稳定地浮在水面上,不会由于水流的波动而使浮力组件5发生不稳定的偏转震动,装置使用时,可对于装置所处位置进行实时定位,从而可有效对于测量海域精确位置进行捕捉,在进行定位后,进行测量,测量后,定位信息与测量信息可捆绑通过5g网络进行反馈,反馈至工作人员的移动设备内,工作人员可对于测量及位置信息进行捕捉。
55.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1