一种分级水面垃圾回收艇组合
1.本发明涉及无人艇技术领域,具体涉及一种分级水面垃圾回收艇组合。
背景技术:
2.目前市面上的针对湖泊、河流、海洋沿岸的垃圾回收方法基本上是一种通过人工驾驶着船艇通过具有倒刺的传送带来达到拾取水域表面垃圾的作用。这种解决方案针对垃圾聚集量大、船艇作业区域空旷的场景较为高效与合理,但是在类似湖泊景区、城市河道等等水域背景下,垃圾分布情况表现为聚集量低、分散高、多沿岸等情况,以往的人工驾驭船艇方式就表现出很大的缺点,例如效率低,费用高,沿岸回收效果差,自动化程度低等。
技术实现要素:
3.本发明的目的在于针对现有技术中的不足之处,提供一种沿岸回收效果好的分级水面垃圾回收艇组合。
4.为达此目的,本发明采用以下技术方案:
5.一种分级水面垃圾回收艇组合,包括垃圾回收船和装载运输船;所述装载运输船跟随所述垃圾回收船;
6.所述垃圾回收船包括船体、回收装置和打包装置;所述回收装置设置在所述船体的前端,所述打包装置设置在所述船体的中部;
7.所述回收装置包括旋转组件、旋转底座和推杆;所述旋转组件独立转动,所述旋转底座驱动所述旋转组件向所述船体方向转动;所述推杆驱动所述旋转组件上下摆动;
8.所述打包装置包括装载架和垃圾袋;所述装载架内容纳多个所述垃圾袋,所述装载架用于撑开、封闭和更换垃圾袋;
9.所述装载运输船包括存储仓、回收传送带和动力装置;所述存储仓为顶部开口的长方体壳状结构,所述回收传送带设置在所述存储仓的前端,所述动力装置设置在存储仓的底部,所述回收传送带和动力装置设置在存储仓相对的两端。
10.更进一步的说明,所述旋转组件包括旋转支架、旋转电机、旋转臂和档杆;所述旋转支架为矩形的框状结构;所述旋转支架的前端设有旋转臂,所述旋转臂与所述旋转电机相连;所述旋转臂的下方和所述旋转支架的框内设有相互交错的若干挡杆。
11.更进一步的说明,所述旋转电机的输出端与所述旋转臂的中部相连将所述旋转臂分为等距的两段,每段旋转臂的长度均不超过所述旋转支架的长度。
12.更进一步的说明,所述旋转组件还包括转动轮,所述转动轮设置在所述旋转臂的末端,所述转动轮的转动轴与所述旋转电机输出端的转动轴平行。
13.更进一步的说明,所述装载架为框状结构,所述装载架的两边内侧设有可上下滑动的移动拨块,所述移动拨块可被驱动从所述装载架内侧凸出或收拢;所述装载架的顶部内侧设有电磁铁;所述装载架的底部内侧设有若干垃圾袋;所述垃圾袋开口处的上下两端分别设有具有磁性的包装袋上板和包装袋下板,所述包装袋上板和包装袋下板的侧边设有
供移动拨块插入的插孔。
14.更进一步的说明,所述船体包括承载部、动力部和垃圾存储部;两个所述承载部间隔设置,所述回收装置分别设置在两个所述承载部的前端,所述打包装置设置在两个所述承载部之间,所述动力部分别设置在两个所述承载部的尾端。
15.更进一步的说明,所述回收装置和打包装置之间设有传送装置,所述传送装置靠近回收装置的一端设置在低位,所述传送装置靠近打包装置的一端设置在高位,所述传送装置的表面镂空并设有钩钉。
16.更进一步的说明,所述船体的顶部设有太阳能板,所述打包装置设置在所述太阳能板下方。
17.更进一步的说明,所述回收传送带靠近存储仓的一端设置在高位,所述回收传送带远离存储仓的一端设置在低位,所述回收传送带的表面镂空并设有钩钉。
18.更进一步的说明,所述垃圾回收船和装载运输船均设有视觉检测装置,所述垃圾回收船上的视觉检测装置用于检测水面垃圾,所述装载运输船上的视觉检测装置用于检测垃圾回收船打包的垃圾袋。
19.上述技术方案可以带来以下有益效果:在垃圾拾取方面本专利提出的2级主动式垃圾回收解决方案,能够有效的河岸进行高效率垃圾拾取、非沿岸的高效率作业。垃圾打包处理能够提升无人艇的垃圾回收效率,以此增加无人艇的水域垃圾回收效率。此外本设计中提出的主艇垃圾回收,副艇装载运输船的结构不仅能都通过1对1的方式提升整个作业水域的垃圾回收效率,同样可以通过多对1的方式来进一步的提升效率,并且通过多艇分类作业的方式提供水域垃圾打捞及其回收的全流程的自动化和智能化,完成水域垃圾的全流程管控。
附图说明
20.下面结合附图和实施例对本发明进一步说明。
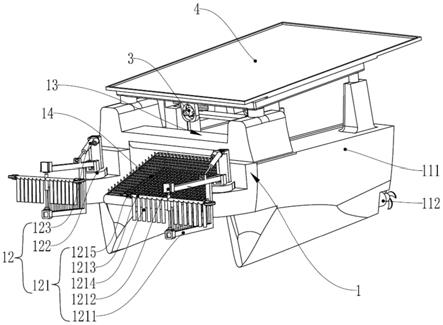
21.图1是本发明的一个实施例的垃圾回收船的结构示意图;
22.图2是本发明的一个实施例的垃圾回收船的结构示意图;
23.图3是图2的局部放大图;
24.图4是本发明的一个实施例的装载运输船的结构示意图。
25.其中:垃圾回收船1、船体11、承载部111、动力部112、垃圾存储部113、回收装置12、旋转组件121、旋转支架1211、旋转电机1212、旋转臂1213、档杆1214、转动轮1215、旋转底座122、推杆123、打包装置13、装载架131、移动拨块1311、电磁铁1312、包装袋上板1313、包装袋下板1314、传送装置14、装载运输船2、存储仓21、回收传送带22、动力装置23、视觉检测装置3和太阳能板4。
具体实施方式
26.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
27.如图1
‑
图4所示,一种分级水面垃圾回收艇组合,包括垃圾回收船1和装载运输船2;所述装载运输船2跟随所述垃圾回收船1;
28.所述垃圾回收船1包括船体11、回收装置12和打包装置13;所述回收装置12设置在
所述船体11的前端,所述打包装置13设置在所述船体11的中部;
29.所述回收装置12包括旋转组件121、旋转底座122和推杆123;所述旋转组件121独立转动,所述旋转底座122驱动所述旋转组件121向所述船体11方向转动;所述推杆123驱动所述旋转组件121上下摆动;
30.所述打包装置13包括装载架131和垃圾袋;所述装载架131内容纳多个所述垃圾袋,所述装载架131用于撑开、封闭和更换垃圾袋;
31.所述装载运输船2包括存储仓21、回收传送带22和动力装置23;所述存储仓21为顶部开口的长方体壳状结构,所述回收传送带22设置在所述存储仓21的前端,所述动力装置23设置在存储仓21的底部,所述回收传送带22和动力装置23设置在存储仓21相对的两端。
32.垃圾回收船1用于回收水面垃圾并进行打包,垃圾运输船用于将打包的垃圾运输走。工作时,垃圾回收船1发现垃圾后向垃圾行驶,回收装置12将垃圾收集,打包装置13在船体11的中部将垃圾打包。回收装置12的旋转组件121通过转动的方式将垃圾朝着打包装置13推进,旋转组件121独立转动的设计可以配合旋转底座122的转动,拨动垃圾进入打包装置13。推杆123可以驱动旋转组件121上下摆动,在垃圾回收船1靠岸的过程中,可以将旋转组件121抬起,避免发生磕碰。打包装置13的装载架131内可以容纳多个垃圾袋,避免垃圾回收船1频繁往返补给垃圾袋。装载架131可以封闭、更换装满的垃圾袋,防止垃圾装满后无处放置,封闭的垃圾袋也方便后续的回收。装载运输船2的存储仓21能够容纳打包好的垃圾袋,回收传送带22能够将垃圾袋运输至存储仓21内,动力装置23用于推进装载运输船2。
33.更进一步的说明,所述旋转组件121包括旋转支架1211、旋转电机1212、旋转臂1213和档杆1214;所述旋转支架1211为矩形的框状结构;所述旋转支架1211的前端设有旋转臂1213,所述旋转臂1213与所述旋转电机1212相连;所述旋转臂1213的下方和所述旋转支架1211的框内设有相互交错的若干挡杆。
34.旋转支架1211和旋转臂1213均可以旋转,选择支架在大的扇形范围内将垃圾收拢聚集,选择臂辅助将垃圾朝着中心方向聚集,交错的档杆1214可以避免小块的垃圾从旋转支架1211的空隙中溜走。
35.更进一步的说明,所述旋转电机1212的输出端与所述旋转臂1213的中部相连将所述旋转臂1213分为等距的两段,每段旋转臂1213的长度均不超过所述旋转支架1211的长度。
36.旋转臂1213每转动一周,就可以扫过两次旋转支架1211,提高收集垃圾的效率。
37.更进一步的说明,所述旋转组件121还包括转动轮1215,所述转动轮1215设置在所述旋转臂1213的末端,所述转动轮1215的转动轴与所述旋转电机输出端的转动轴平行。
38.转动轮1215一方面可以避免旋转臂1213的末端与不规则的垃圾卡住,另一方面可以辅助拨动垃圾往中心靠拢,方便收集垃圾。
39.更进一步的说明,所述装载架131为框状结构,所述装载架131的两边内侧设有可上下滑动的移动拨块1311,所述移动拨块1311可被驱动从所述装载架131内侧凸出或收拢;所述装载架131的顶部内侧设有电磁铁1312;所述装载架131的底部内侧设有若干垃圾袋;所述垃圾袋开口处的上下两端分别设有具有磁性的包装袋上板1313和包装袋下板1314,所述包装袋上板1313和包装袋下板1314的侧边设有供移动拨块1311插入的插孔。
40.垃圾袋依次垒在装载架131的底部。装载垃圾袋时,移动拨块1311伸出嵌入进包装
袋下板1314的插孔内,随后推动垃圾袋下移,将包装袋上板1313和包装袋下板1314分开。垃圾袋装满后,移动拨块1311推动包装袋下板1314上移,使其与包装袋下板1314吸附,电磁铁1312停止工作,整个垃圾袋从装载架131上脱离。整个过程可以实现垃圾袋的自动装载、封口和更换,垃圾回收船1可一次携带10个垃圾袋,增加了垃圾回收船1在水面持续作业的能力。为了节省磁性材料的成本,更优的,将包装袋下板1314的上表面设置磁性凸起,包装袋上板1313的下表面设置凹陷,凹陷内放置铁片,如此设置包装袋下板1314和包装袋上板1313可以通过凸台结构进一步限位。
41.更进一步的说明,所述船体11包括承载部111、动力部112和垃圾存储部113;两个所述承载部111间隔设置,所述回收装置12分别设置在两个所述承载部111的前端,所述打包装置13设置在两个所述承载部111之间,所述动力部112分别设置在两个所述承载部111的尾端。
42.承载部111用于承载整个装置,由于垃圾是在船体11的中部进行回收打包,因此分开设计的两个承载部111可以提供空间用于收集和打包垃圾,同时避免水流的冲击对船体11有过大的阻力。动力部112设置在承载部111的尾端,提供动力,保证船体11平稳行进。
43.更进一步的说明,所述回收装置12和打包装置13之间设有传送装置14,所述传送装置14靠近回收装置12的一端设置在低位,所述传送装置14靠近打包装置13的一端设置在高位,所述传送装置14的表面镂空并设有钩钉。
44.由于回收的垃圾是水面垃圾,因此回收过程中垃圾中会有很多水分,传送装置14倾斜设置可以避免过多的水被传送到打包装置13内,增加打包装置13的负担,传送装置14的表面镂空可以帮助沥干垃圾的水分,设置的钩钉可以防止垃圾滑落。
45.更进一步的说明,所述船体11的顶部设有太阳能板4,所述打包装置13设置在所述太阳能板4下方。
46.太阳能板4一方面可以为整个装置功能,另一方面可以为打包装置13遮挡雨水。
47.更进一步的说明,所述回收传送带22靠近存储仓21的一端设置在高位,所述回收传送带22远离存储仓21的一端设置在低位,所述回收传送带22的表面镂空并设有钩钉。
48.镂空且倾斜设置的回收传送带22可以避免回收垃圾时垃圾带有过多的水分,加重装载运输船2的负担,钩钉可以防止垃圾滑落。
49.更进一步的说明,所述垃圾回收船1和装载运输船2均设有视觉检测装置3,所述垃圾回收船1上的视觉检测装置3用于检测水面垃圾,所述装载运输船2上的视觉检测装置3用于检测垃圾回收船1打包的垃圾袋。
50.视觉检测装置3可以帮助垃圾回收船1和装载运输船2在水面搜寻目标。
51.以上内容仅为本发明的较佳实施例,对于本领域的普通技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1