一种船用高集成无轴轮缘推进器的制作方法
1.本发明涉及推进器技术领域,特别涉及一种船用高集成无轴轮缘推进器。
背景技术:
2.传统的推进器,均是借由外部设备对推进器进行控制,例如用机械方式或遥控方式控制螺旋桨的转速等。控制设备与推进设备分离带来的问题是,通讯线路长,信号干扰大,传输故障率多。为了保证良好的散热,控制模块的功率体积比小,集成度差。
3.从结构上来看,传统推进器不管以电力还是燃油提供动力,都需要有传动轴带动螺旋桨旋转产生推力,即由发动机加传动轴加推进器形成的推进系统,这种推进系统是目前水上交通工具主要的推进方式。随着人类对技术要求的进一步提高,轴系震动、结构冗杂、功率损耗、震动噪声已成为亟需解决的问题,无轴推进技术将是未来推进器的发展方向。
4.因此目前来看,现有推进器需要解决的问题包括:
5.1.集成问题。需将推进模块、电机模块、控制模块整合到一起,以提高推进器的集成度,增强一致性,提高推进效率与信号传输效率。
6.2.控制和驱动模块的散热问题。驱动电路内置,与推进器一同置于水中,可利用流动的水流解决驱动电路的散热问题。由于没有过热风险,相同体积的驱动电路的功率密度可以做到更高,提高推进系统整体效率。
技术实现要素:
7.本发明的目的在于针对现有技术的不足而提供一种船用高集成无轴轮缘推进器,其集成度高,结构紧凑,对船舶的通用性较强。采用全数字化控制,信号传输抗干扰能力强,系统效率高;且整个结构浸没于水中,无需考虑润滑与冷却的问题。
8.为达到上述目的,本发明通过以下技术方案来实现:
9.一种船用高集成无轴轮缘推进器,推进器的一端为进水口处,另一端为出水口处,包括导流外壳、螺旋桨组件、电机模块和电机驱动控制模块,所述螺旋桨组件、所述电机模块与所述电机驱动控制模块设置于导流外壳的内部;所述导流外壳包括前导流盖、后导流盖和环形外壳,所述前导流盖和后导流盖通过螺丝固定于环形外壳的前端和后端,所述螺旋桨组件包括螺旋桨和轮缘,所述螺旋桨与所述轮缘为一体式设置,所述螺旋桨为环形阵列均匀布置,所述轮缘的内径面连接所述螺旋桨,所述电机模块包括内转子和外定子,所述外定子设置于所述环形外壳的内壁上,所述内转子与所述轮缘的外径面连接固定,所述电机驱动控制模块通过螺丝固定在导流外壳内,并与所述外定子的一端电连接,所述电机驱动控制模块包括功率板、控制板、动力电源接线和uvw电机接线,所述电机驱动控制模块和外定子通过树脂胶灌封在导流外壳的内部。
10.进一步地,所述前导流盖设有第一限位槽,所述第一限位槽内设有第一轴承,所述后导流盖设有第二限位槽,所述第二限位槽设有第二轴承。
11.进一步地,所述内转子的前端卡入所述第一轴承,所述内转子的后端卡入所述第二轴承。
12.进一步地,所述外定子与所述内转子产生磁转力矩,带动所述螺旋桨组件旋转。
13.进一步地,所述功率板采用四层pcb设计,顶面是九颗滤波电容,采用卧式安装,底面是十二颗功率mosfet组成的功率电路,所述功率板采用螺丝固定在一片同尺寸环形铝板散热基座上,所述动力电源接线从所述功率板引入,所述uvw电机接线从所述功率板输出,所述功率板主电流回路的pcb走线、过孔均保证额定电流需求。
14.进一步地,所述控制板采用四层pcb设计,焊接三个贴片2x2pin双排排针h=15固定到功率板顶面,完成控制板与功率板之间的电气连接。
15.进一步地,所述控制板上设有三相全桥逆变电路、实时控制器、弱电电源电路、三相全桥驱动电路和监测电路。
16.进一步地,所述实时控制器可通过磁场定向控制、方波控制或正弦波控制实现对内转子转速的实时高精度控制,实现所述推进器的叶轮的加速、减速。
17.进一步地,所述监测电路作用是监测运行过程中硬件设备的安全。
18.进一步地,所述电机驱动控制模块用树脂胶灌封,胶的厚度薄而均匀,起到绝缘和导热作用;同时水流可以流入推进器内部,对内部结构进行散热,无需额外增加水冷装置。
19.进一步地,所述电机驱动控制模块为环形结构,所述电机驱动控制模块的内径与所述外定子内径一致,所述电机驱动控制模块的外径与所述环形外壳内径一致。
20.本发明的有益效果是:
21.1.本发明的船用高集成无轴轮缘推进器,采用轮缘驱动方式,电机内转子直接带动螺旋桨组件旋转,精简了传动机构,电磁扭矩可以最大限度的传递给螺旋桨,减少了功率损耗。
22.2.本发明的船用高集成无轴轮缘推进器,采用全数字控制,特殊设计的内置电机驱动控制模块对内转子转速实时高精度控制,集成度高,扩展性强。减少了信号传输损耗,同时减少了故障率。电机驱动控制模块散热效率好,功率密度高。
23.3.本发明的电机驱动控制模块、电机外转子用树脂胶灌封,胶的厚度薄而均匀,起到绝缘作用,同时水流可以流入推进器内部,对内部结构进行散热,无需额外增加水冷装置。
24.4.本发明的船用高集成无轴轮缘推进器,高集成式设计,减少了轴系、控制设备等附体,减少了水体中的行进阻力。
附图说明
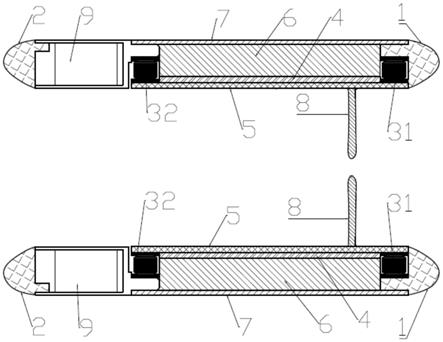
25.图1为本发明的结构示意图;
26.图2为本发明整体示意图;
27.图3为电机驱动的弱电电源电路图;
28.图4为功率器件控制电路图;
29.图5为采样电阻电路图;
30.图中:1-前导流盖、2-后导流盖、31-第一轴承、32-第二轴承、4-内转子、 5-轮缘、6-外定子、7-环形外壳、8-螺旋桨、9-电机驱动控制模块。
具体实施方式
31.下面将结合附图,对本发明的技术方案进行清楚、完整地描述。
32.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。术语“第一”、“第二”等只是为了区分各部件的名称,并没有主次关系,因此不能理解为对本发明的限制。术语“连接”、“设置”应做广义理解,可以是固定相连、设置,也可以是可拆卸连接、设置,或一体地连接、设置。
33.下面结合附图对本发明作进一步详细说明。
34.如图1-2所示:
35.一种船用高集成无轴轮缘推进器,包括导流外壳、螺旋桨组件、电机模块和电机驱动控制模块9,所述推进器的一端为进水端,另一端为出水端。
36.导流外壳包括前导流盖1、后导流盖2、环形外壳7;前导流盖1、后导流盖2分别位于推进器的进水端与出水端,通过螺丝固定于环形外壳7上,环形外壳7是推进器最重要的保护结构。
37.前导流盖1设有第一限位槽,第一限位槽内设有第一轴承31,后导流盖2 设有第二限位槽,第二限位槽设有第二轴承32。
38.螺旋桨组件包括螺旋桨8和轮缘5,螺旋桨8和轮缘5为一体式设置,螺旋桨8按照环形阵列均匀布置,轮缘5的内径面连接螺旋桨8,螺旋桨组件一体加工。
39.电机模块包括内转子4和外定子6,内转子4位于轮缘5外沿,内转子4的前端卡入第一轴承31,后端卡入第二轴承32,并限制前后位置,避免内转子4 的轴向窜动。外定子6通过树脂胶灌封在环形外壳7的内壁上。
40.前导流盖1设有第一限位槽,第一限位槽内设有第一轴承31,后导流盖2 设有第二限位槽,第二限位槽设有第二轴承32,内转子4的前端卡入第一轴承 31,后端卡入第二轴承32。第一轴承31和第二轴承32主要用于固定内转子4,使其轴线始终与外定子6轴线重合,并限制前后位置,避免内转子4的轴向窜动。外定子6固定于环形外壳7的内壁上,内转子4与螺旋桨组件固定在一起,通电时,外定子6与内转子4之间产生磁转力矩,在磁转力矩的作用下,内转子4转动,进而带动螺旋桨组件旋转,产生推力。此处,内转子4直接带动螺旋桨组件旋转,精简了传动机构,电磁扭矩可以最大限度的传递给螺旋桨8,减少了功率损耗。
41.电机驱动控制模块9为环形结构,电机驱动控制模块9的内径与外定子6 内径一致,电机驱动控制模块9的外径与环形外壳7内径一致。电机驱动控制模块9通过螺丝固定在导流外壳内,并与外定子6的一端电连接。电机驱动控制模块9包括功率板和控制板。电机驱动控制模块9包括功率板、控制板、动力电源接线和uvw电机接线,外定子6与电机驱动控制模块9通过树脂胶灌封在导流外壳的内部。
42.其中:
43.图3为弱电电源电路图,弱电电源部分是基础需求,给电机驱动里面的芯片供电的;
44.图4为功率器件控制电路图;
45.图5为采样电阻电路图。
46.电机驱动控制模块9的功率板采用四层pcb设计,顶面是九颗63v220uf红宝石yxj滤波电容,采用卧式安装,底面是十二颗功率mosfet组成的功率电路,功率板采用螺丝固定在一片同尺寸环形铝板散热基座上,环形铝板散热基座固定在导流外壳内部。
47.功率板主电流回路的pcb走线、过孔均保证额定电流需求。动力电源接线从电机驱动控制模块9的功率板引入,uvw电机接线从电机驱动控制模块9的功率板输出。
48.电机驱动控制模块9的控制板采用四层pcb设计,焊接三个贴片2x2pin双排排针h=15固定到功率板的顶面,通过将控制板上排针插入功率板对应的插孔上,完成控制板与功率板之间的电气连接。
49.电机驱动控制模块9引出外部需要的can bus 3pin控制界面接线。
50.电机驱动控制模块9的控制板上设有三相全桥逆变电路、实时控制器、弱电电源电路、三相全桥驱动电路和监测电路。
51.实时控制器通过磁场定向控制、方波控制或正弦波控制实现对内转子4转速、转向的实时高精度控制,进而实现推进器的加速、减速、前进与后退。
52.由于稀土永磁材料的导磁率很低,转子的磁阻很高,可忽略转子的影响,可得bldcm的定子电压平衡方程式为:
[0053][0054]
bldcm的转子磁阻不随转子位置变化,假定电机三相对称,则有:
[0055]
l
a-l
b-l
c-l
[0056]
l
ab-l
ba-l
ca-l
ac-m
[0057]
电压方程可改写为
[0058][0059]
由于电机三相对称,即有
[0060]
ia+ib+i
c-0
[0061][0062]
则上述电压方程可化简为
[0063][0064]
电磁转矩方程为
[0065][0066]
监测电路作用为保证在运行过程中硬件设备的安全,在控制板上通过ptc 热敏电阻对功率模块的温度进行监控。同时,为确保在异常工况:电机堵转、电机损坏等情况下控制模块的安全性,通过运算放大器及直流母线上的采样电阻对控制器的电流进行监控。
[0067]
电机驱动控制模块9采用全数字控制,减少了信号传输损耗,对内转子4 转速实时高精度控制,集成度高,扩展性强,减少了故障率。
[0068]
外定子6及电机驱动控制模块9用树脂胶灌封在导流外壳的内部,胶的厚度薄而均匀,起到绝缘作用;同时水流可以流入推进器内部,对内部结构进行散热,无需额外增加水冷装置。由于相同体积下,水中内置的电机驱动控制模块9散热更好,因此可以具有更高的功率密度,进一步提高了系统的集成度。
[0069]
船用高集成无轴轮缘推进器通过can总线接收控制指令,控制指令内容包括期望转速和旋转方向,并通过can总线反馈实时转速信息。
[0070]
本发明的船用高集成无轴轮缘推进器,高集成式设计,减少了轴系、控制设备等附体,减少了水体中的行进阻力。
[0071]
需要声明的是,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1